



































Hello all, I wanted to start my own thread to discuss my Inmoov and my conversion to EZ Robot. I appreciate all the work by the MRL guys but I struggle with it. I am indebted to the help they gave me but I needed something a little more along in development with some documentation.
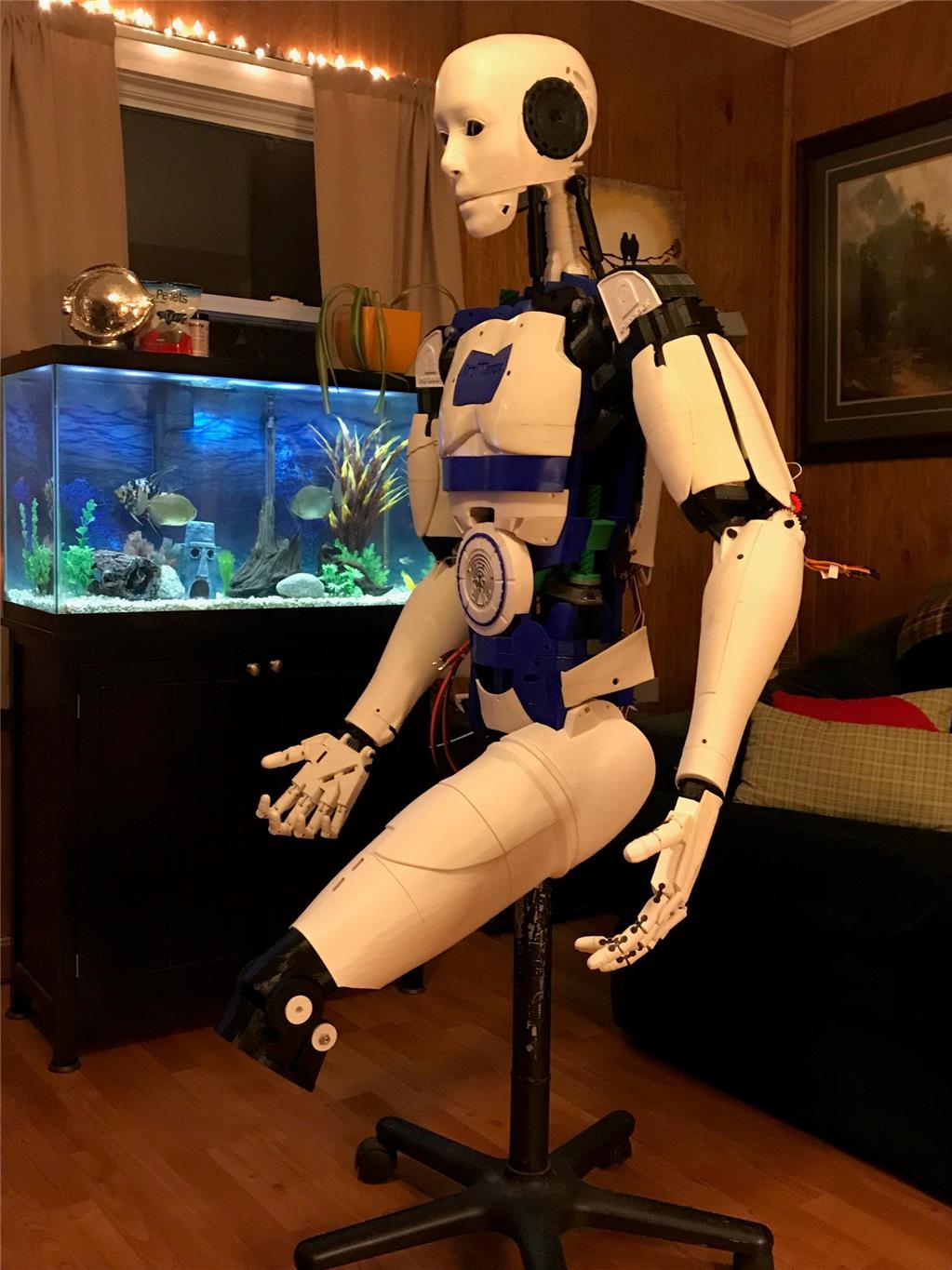
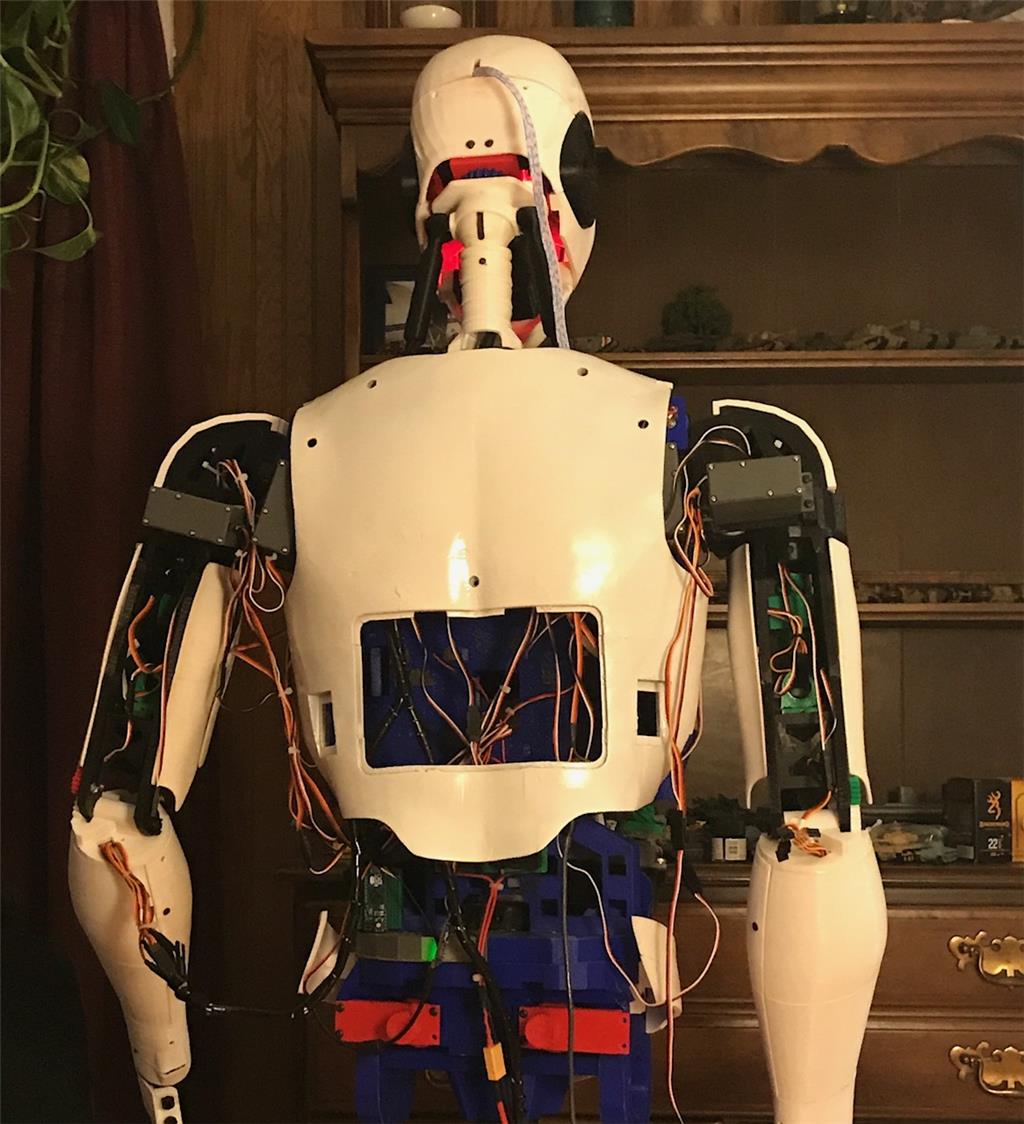
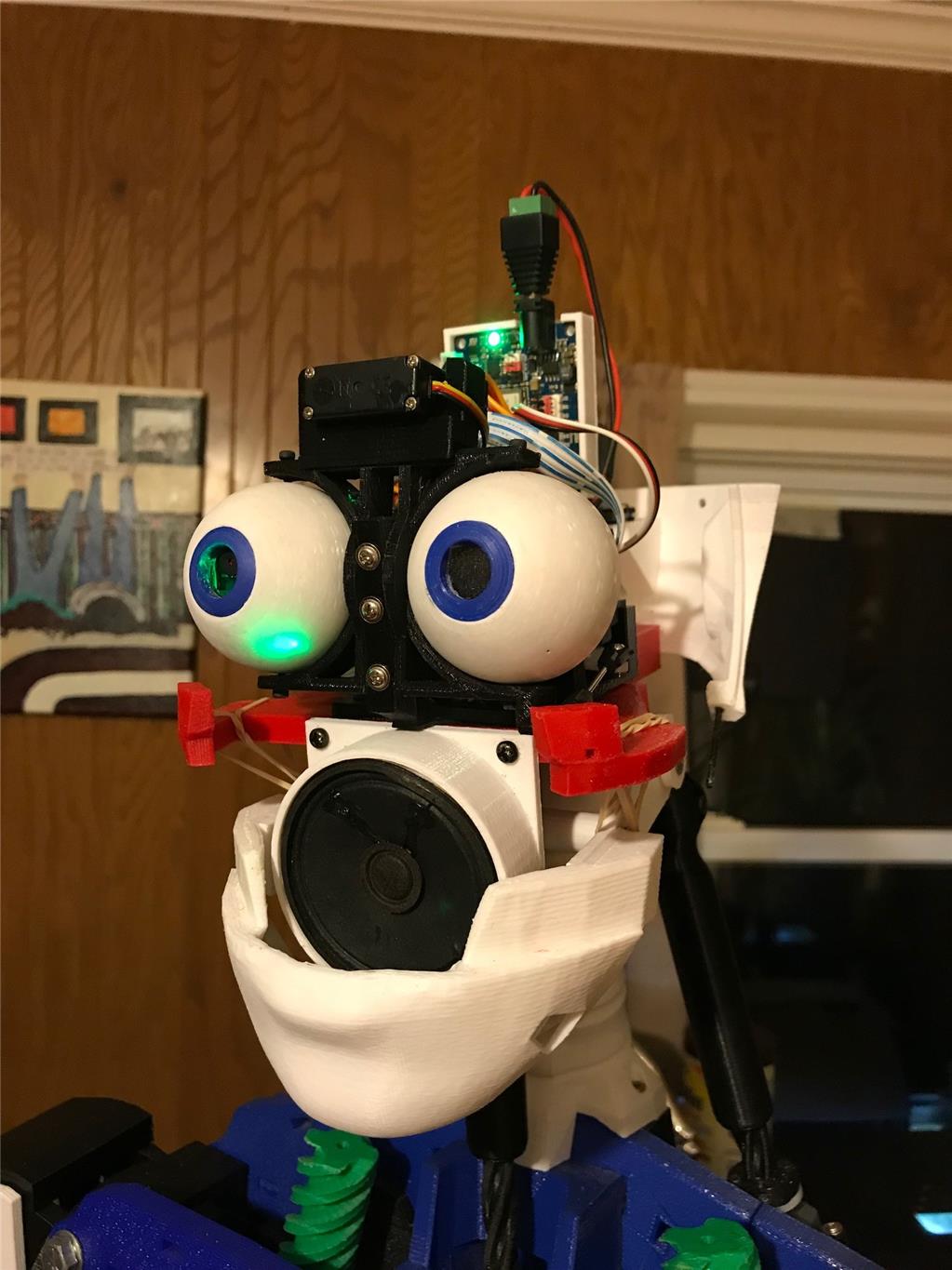
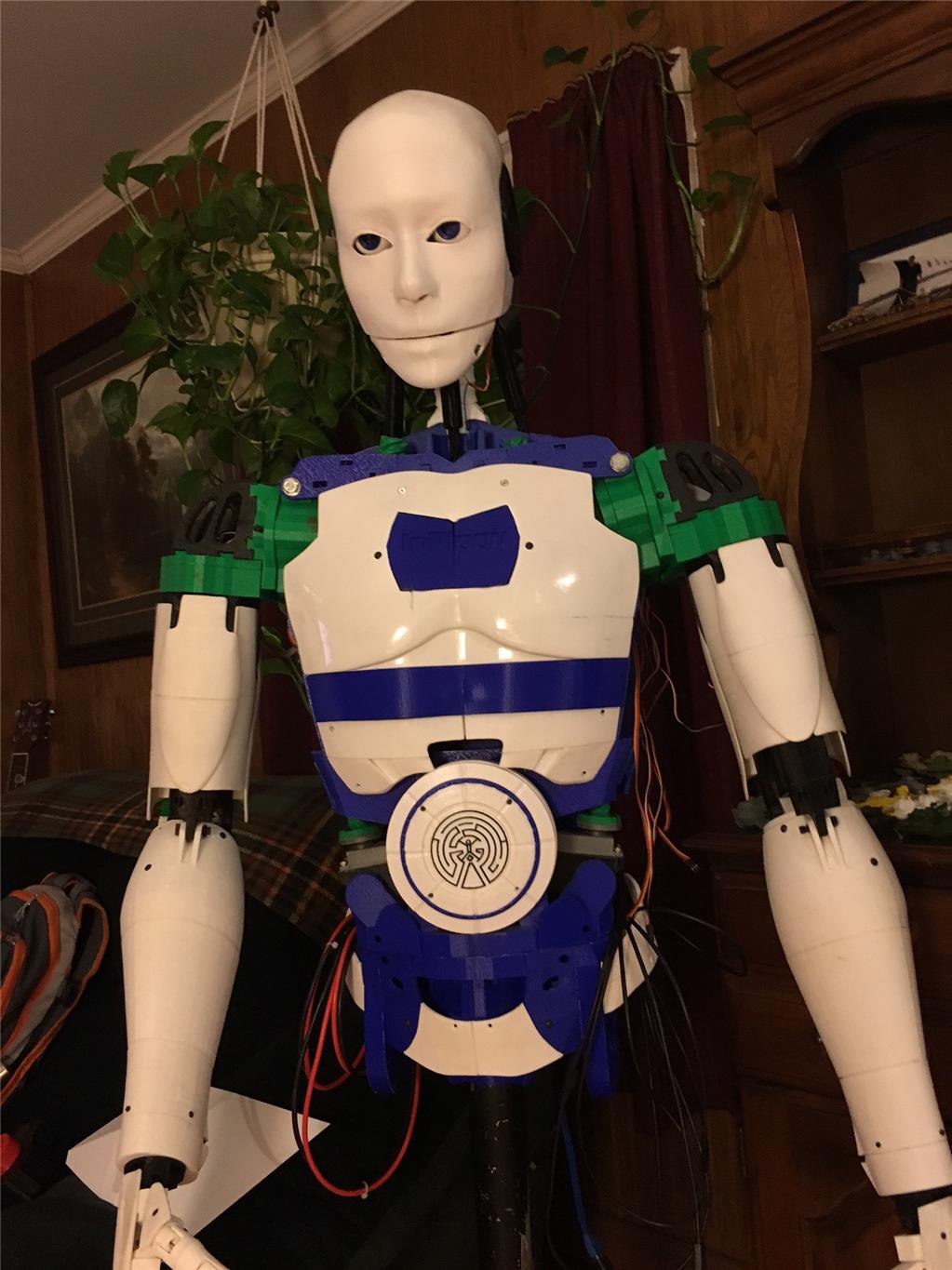
So here is my guy. Pretty standard build as far as inmoov's go.
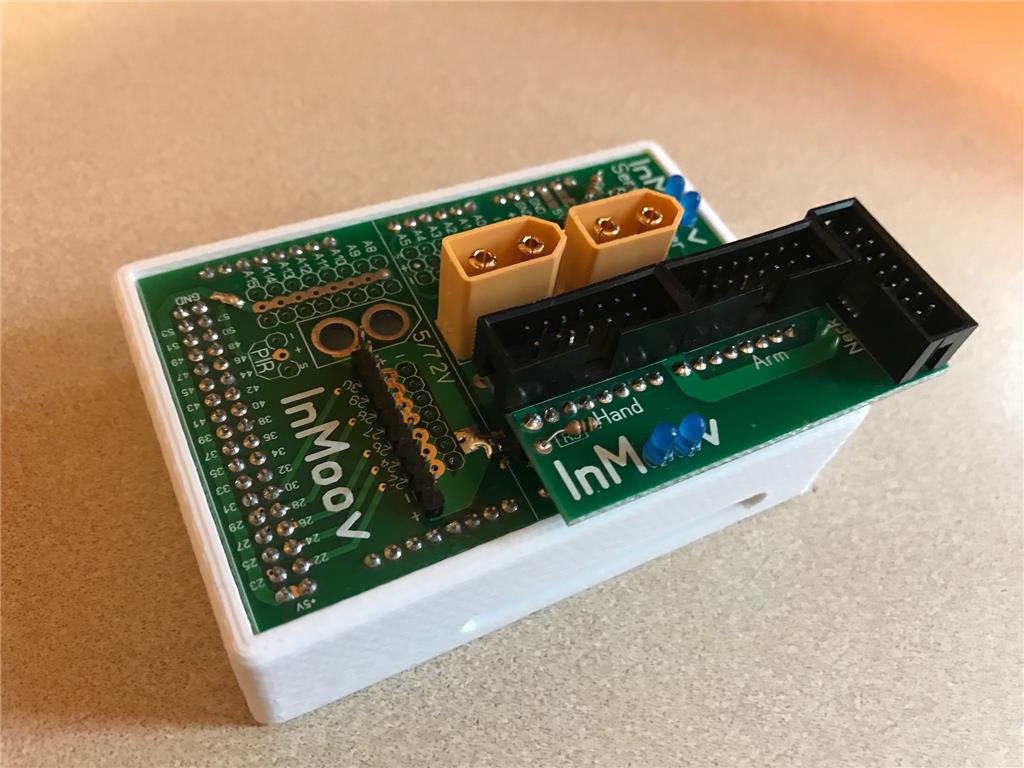
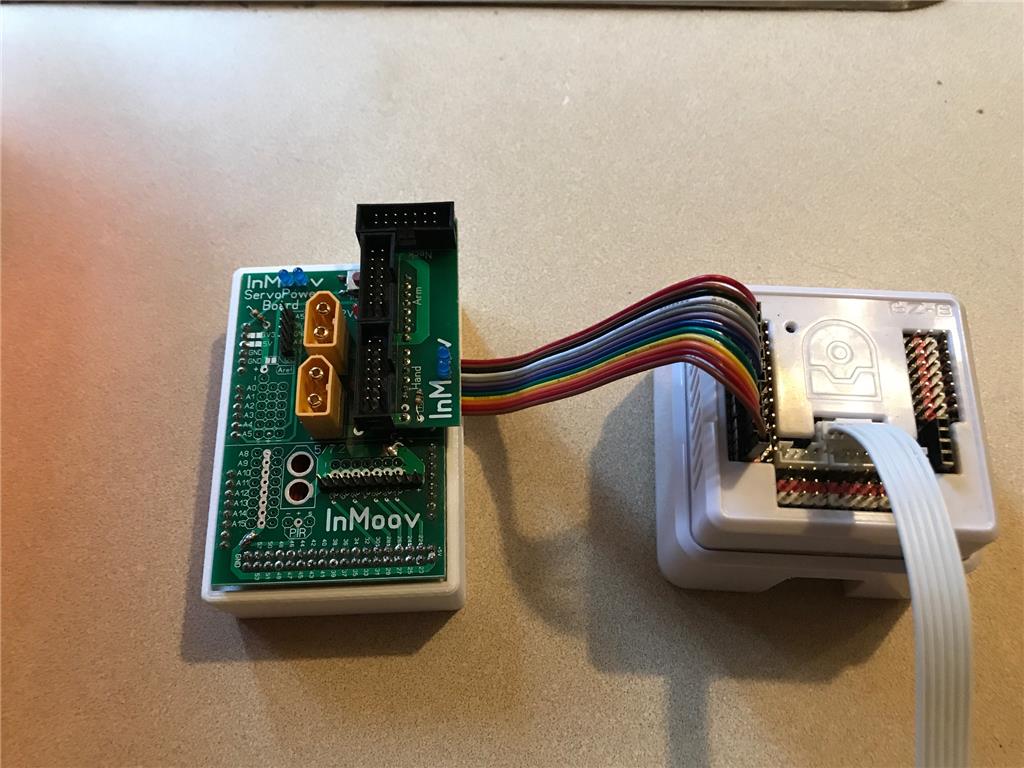
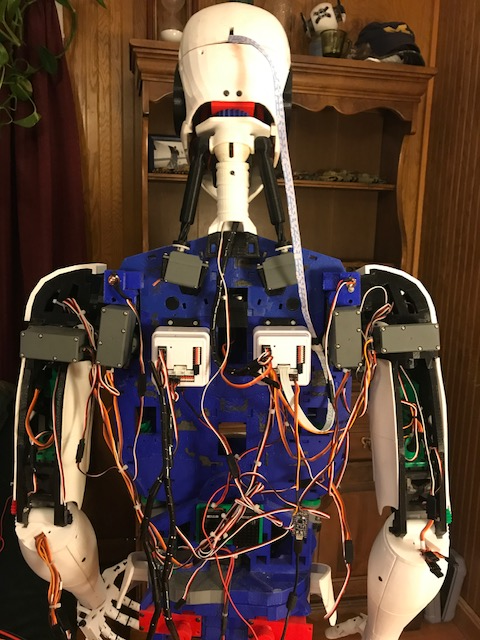
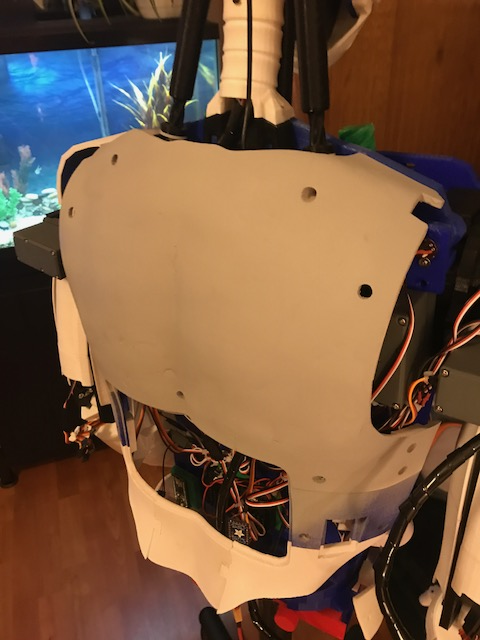
Here's the back. All the standard inmoov components. Dual 256 Megas, Nervo boards USB hub, Power supplys etc.
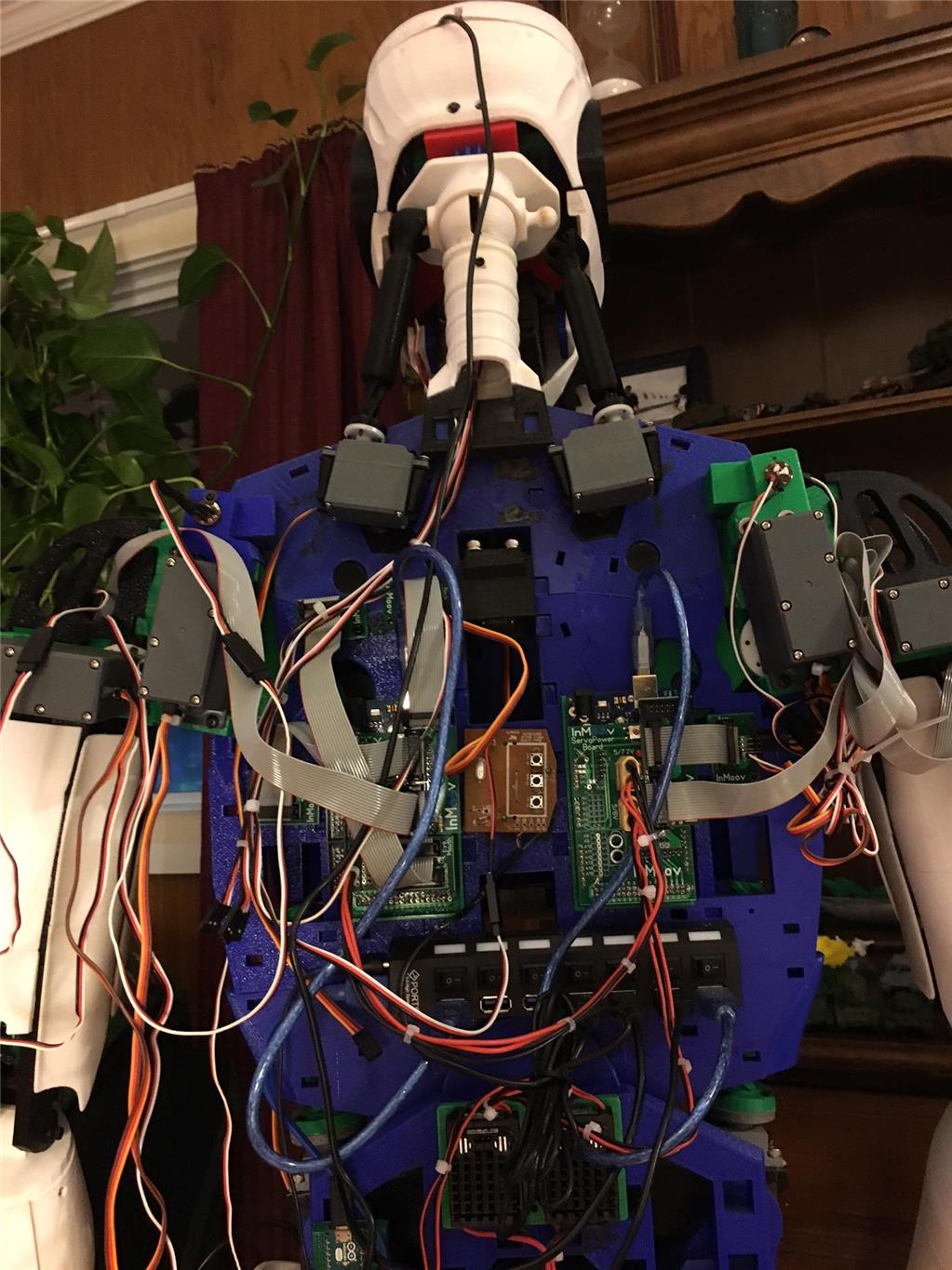
So the tear down begins. I need to clean up that wiring too. What a rats nest!
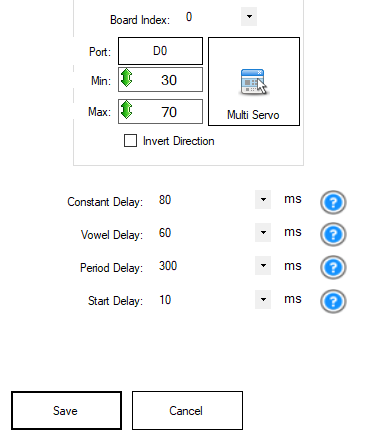
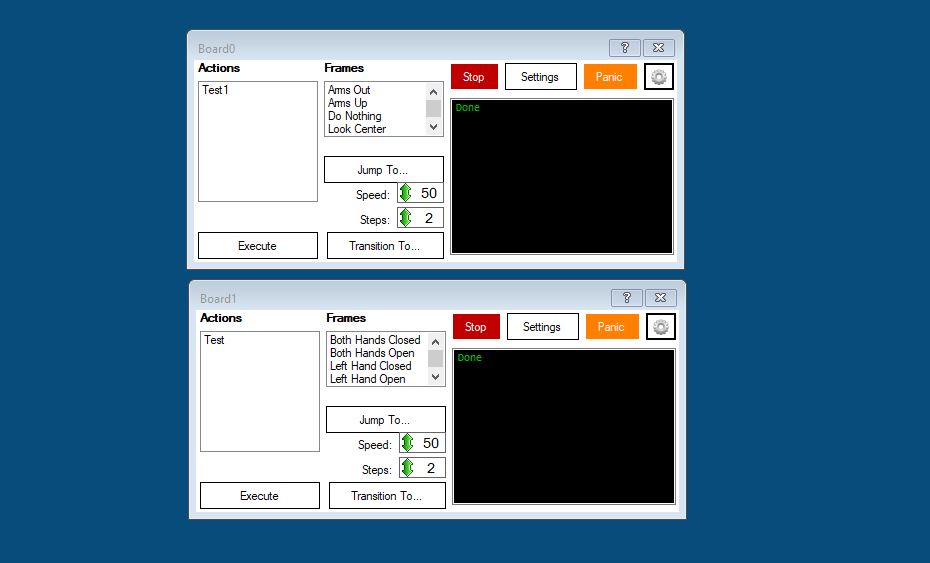
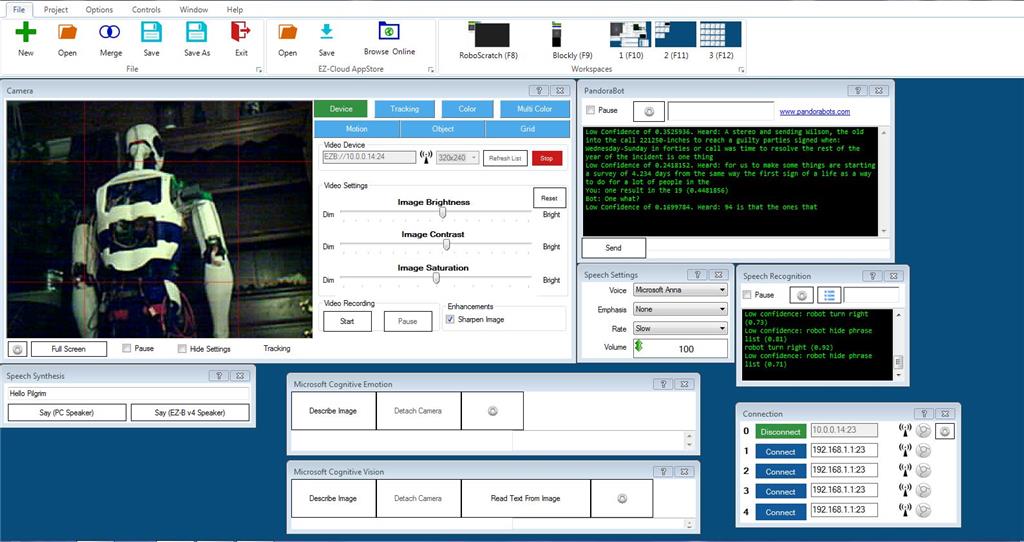
I just received my EZR controller and camera so I have no idea how to program it yet. I figured I would at least try to set up a GUI that allows me to manually move the servos like the MRL swing GUI. Five or six hours later and a few tutorials and I have this three screen model. I was easily able to add way more than basic servo control.
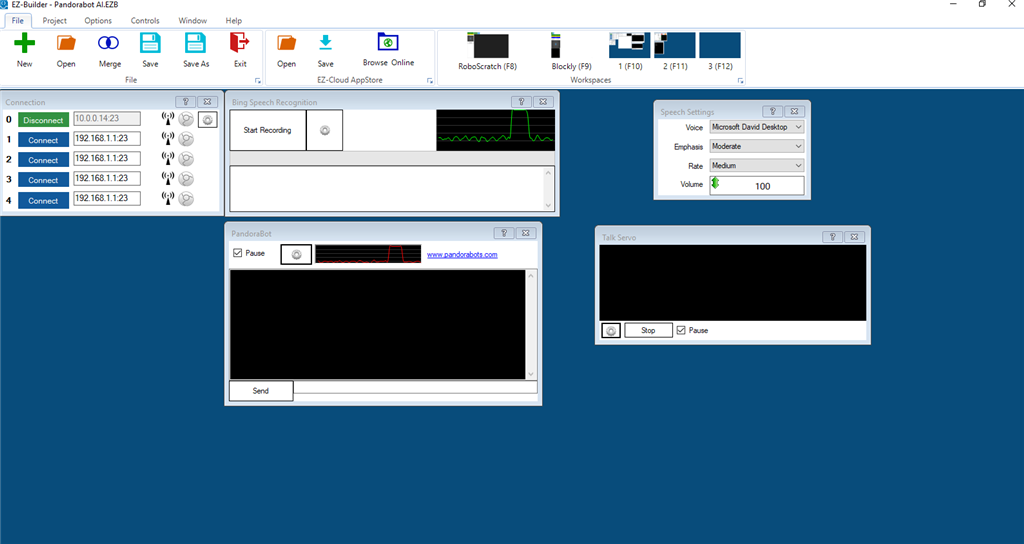
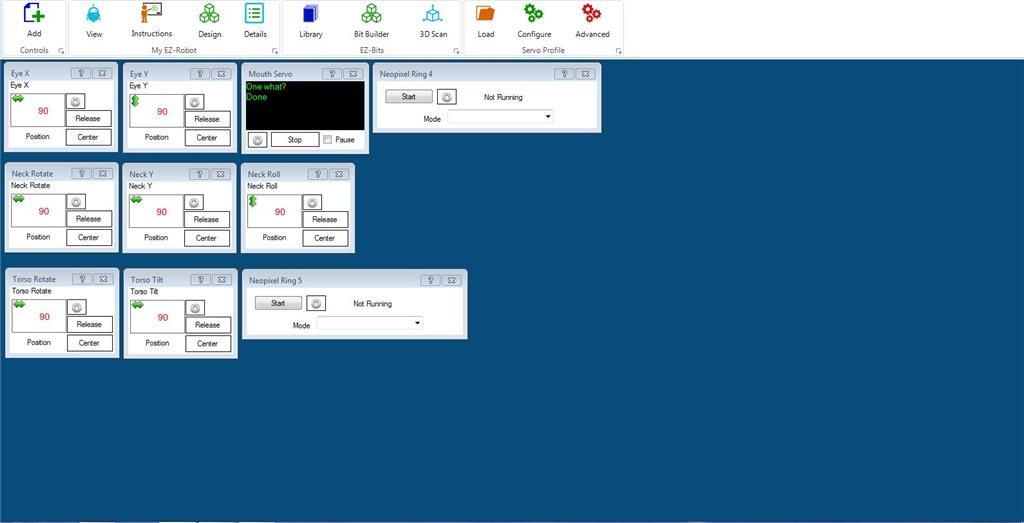
Here is the main control screen. Contains the face tracking speech functions and a custom Pandorabot for AI. Some MS cognitive stuff as well.
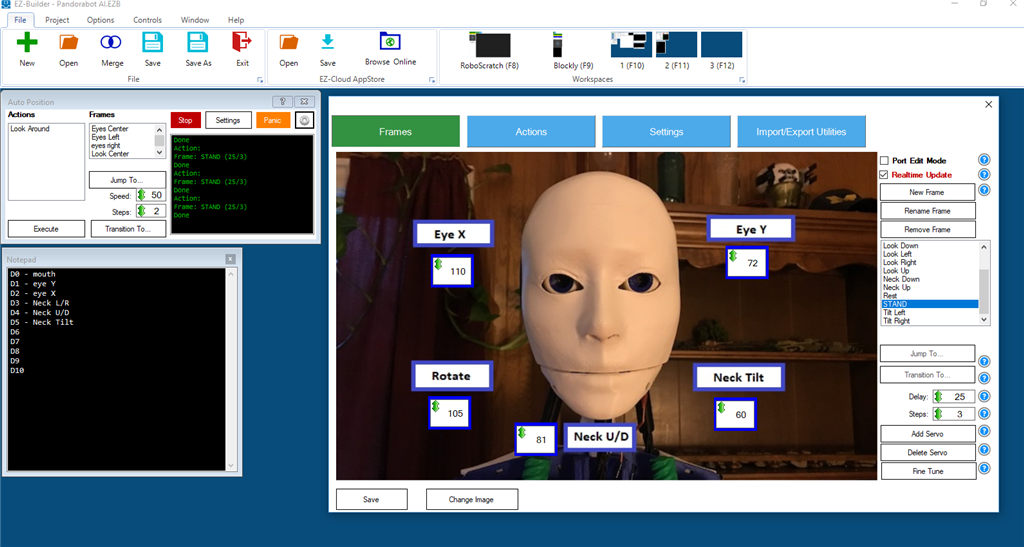
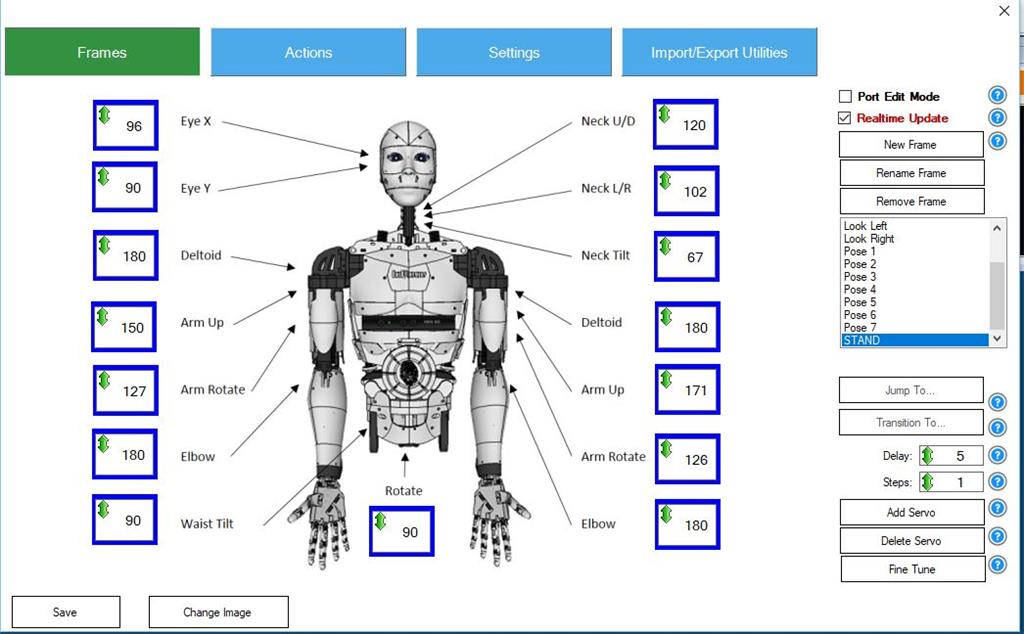
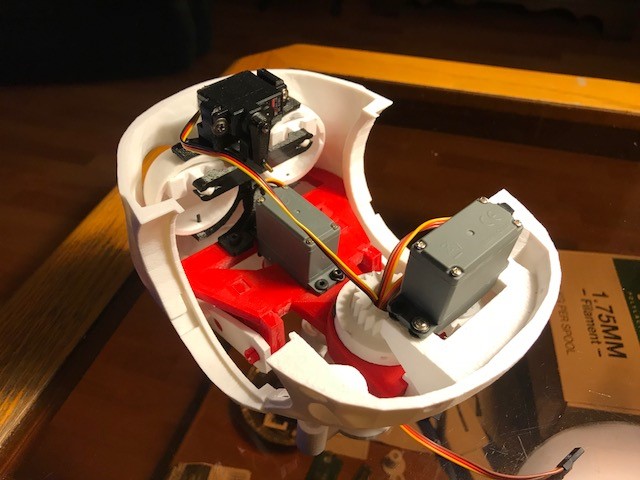
Here is the second screen. Head functions with a mouth control servo, neck, torso, and the 2 neopixel rings I have.
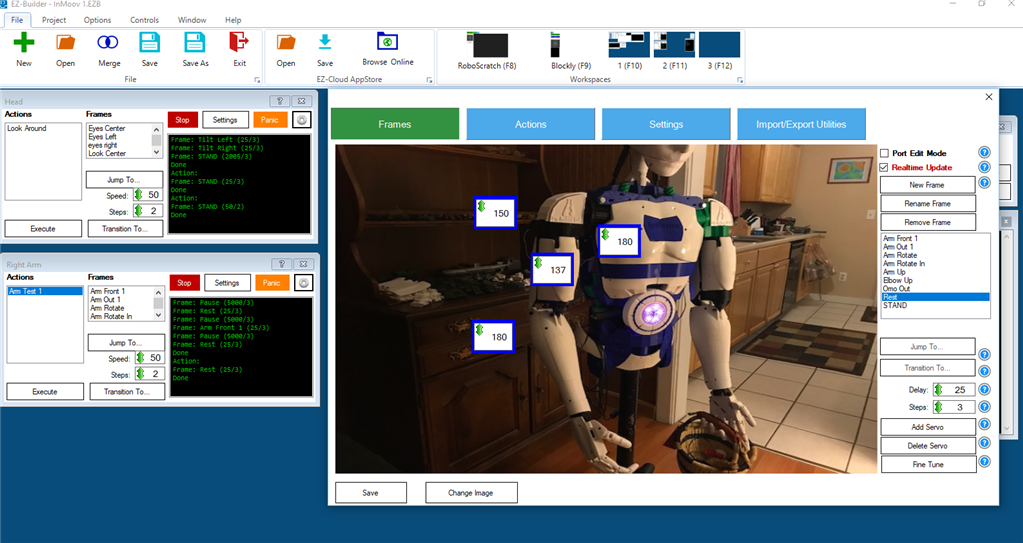
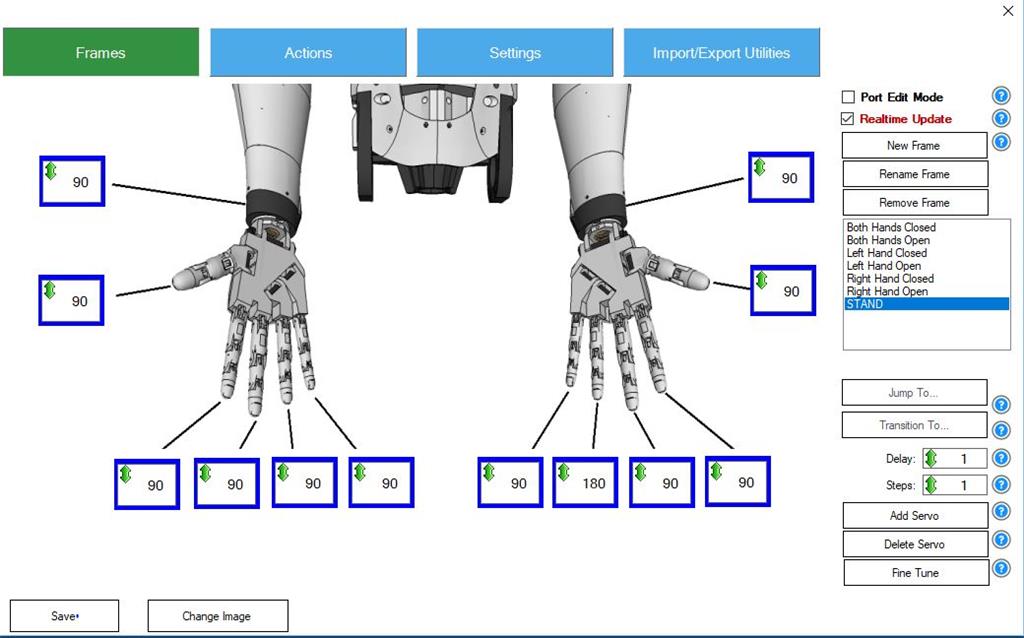
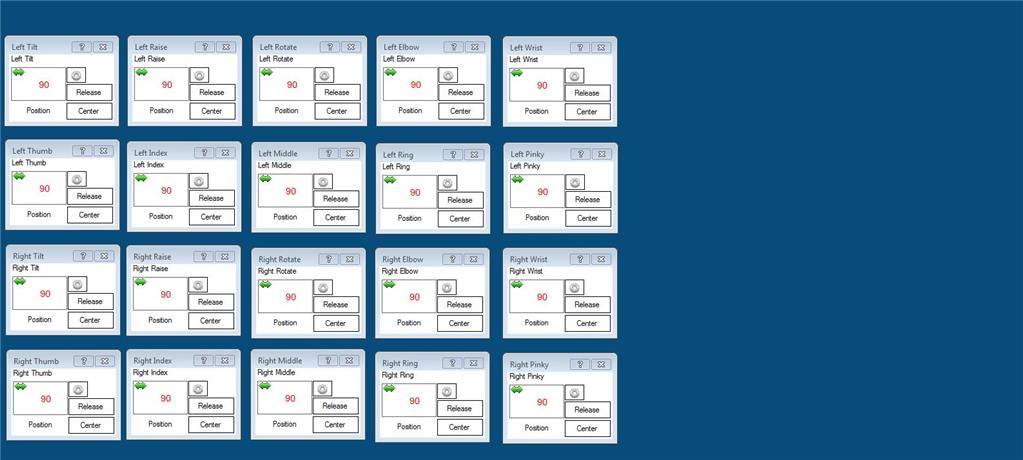
Third screen is for the arms and hands
So now I pretty much have all the same functionality I had in MRL give or take. I am pretty sure I am not doing this entirely correctly but it will come with time. Need to get into the scripting. I guess there are some tutorials to watch. So far my experience has been pretty good and in a day eclipsed my MRL progress of the last 6 months.
I'll update this thread with my progress and appreciate any feedback.
Discover more robots

DJ's Multiple Robots With One Joystick
Billderwent's Boris V2


@mtwannabe So there are dozens of these little tiny robots that can hop about like nothing. Even EZ's robots do this... Now, as for life size humanoid ambulation - that's a whole 'nother ball game...
I use a new version of flsun delta large format to print my Inmoov and I have no negative issues with that printer, I use PetG filament that does not require high temp to print and it is as strong as ABS without the need of a printer enclosure and it sticks to bed without warping, I use a Glass disk on the printer bed and I use Aussie hairspray the parts release with no problems when the bed is cool. PetG filament bonds with Weldon 3 which is the same process as acetone with ABS it is a bond not an adhesive so it is a very strong. and no fumes and is food safe. This is how I build my inmoov and others may have other opinions on how it should be done, but that is how I have done it.
@mayaway
Wow that is 1.25 miles of copper tape! Ok I'll check it out.
You are going to flip over this. James Bruton has a much better version of his walking robot I have not seen. He spliced in a sneak peak using actuators at the end of this video. Fast forward to 10:45. Now this I like.
Here are some actuators: https://jet.com/product/Heavy-Duty-Linear-Actuator-12-Volt-6-Stroke-2-Steel-Brackets-Included/7d9f78552f0c42129c59ff71c77fe1ac?jcmp=pla:bng:nj_roc_gen_electronics_a1:electronics_car_vehicle_electronics_car_safety_security_a1:na:PLA_333246465_1213861007457062_pla-4579465930794947_c:na:na:na:2PLA15&pid=kenshoo_int&c=333246465&is_retargeting=true&clickid=54609dbc-143e-47ea-9f3c-1bbbeab882bb&kclid=54609dbc-143e-47ea-9f3c-1bbbeab882bb&msclkid=e95ae073272415b54b50bbc99bbbab30
Best wishes!
@overserved Which Bruton video at 10:45? Thx!
@mayaway My mistake here is the link
I also found this from Alexander Bersenev on youtube. I am 100% going to build this with added in coil spring shocks.
It is an interesting conversation for sure. I think that the problem that bipeds is in the actuators. Finding actuators that can offer the speed, power, weight profile we need limits all. The human muscle really is a great invention. The best walking robots I see are centered around highly engineered (expensive) actuators tied together with some good code. All the structure that hold them together is the easy part. We can do that.
That last video is pretty cool and shows promise like many others. Once again it is a tiny bot, tethered. I will follow him because it is interesting. Burton's stuff is pretty cool to. Watching his videos he laments a lot about needing better actuators.
I recommend you start a new walking robot thread. I'd like to keep this one about inmoov's.
Perry
@overserved Nice find...never saw this guys clips! I will dig in deeper, never thought about my little robot to start walking, but seeing this makes me think about it!
edit Did you see that ist is five years old, in the comments someone even mentioned that the guy might have died or something! It's a great build, sad it's never been updated or worked on!
Hi All, Iam trying to finish "Toby" my Inmoov. I have been working on him for about a year. I am using MRL but looking to switch over to EZ Robot. My main problem right now is setting the right shoulder pot and getting it calibrated to 90 degrees. I had it working and one day I powered Toby up and he spun his right arm completely around.
Question: Is EZ robot easier to calibrate the servos?