
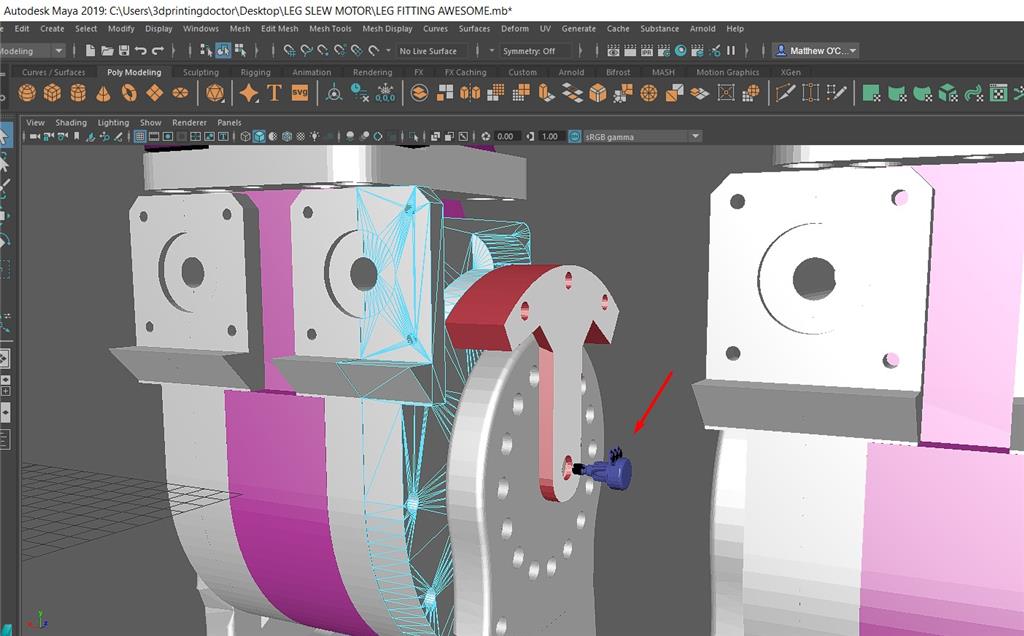
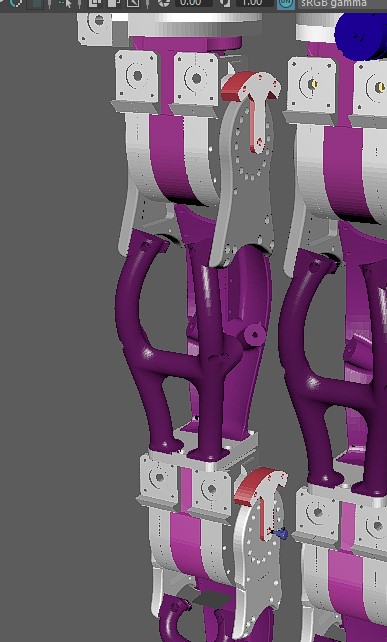
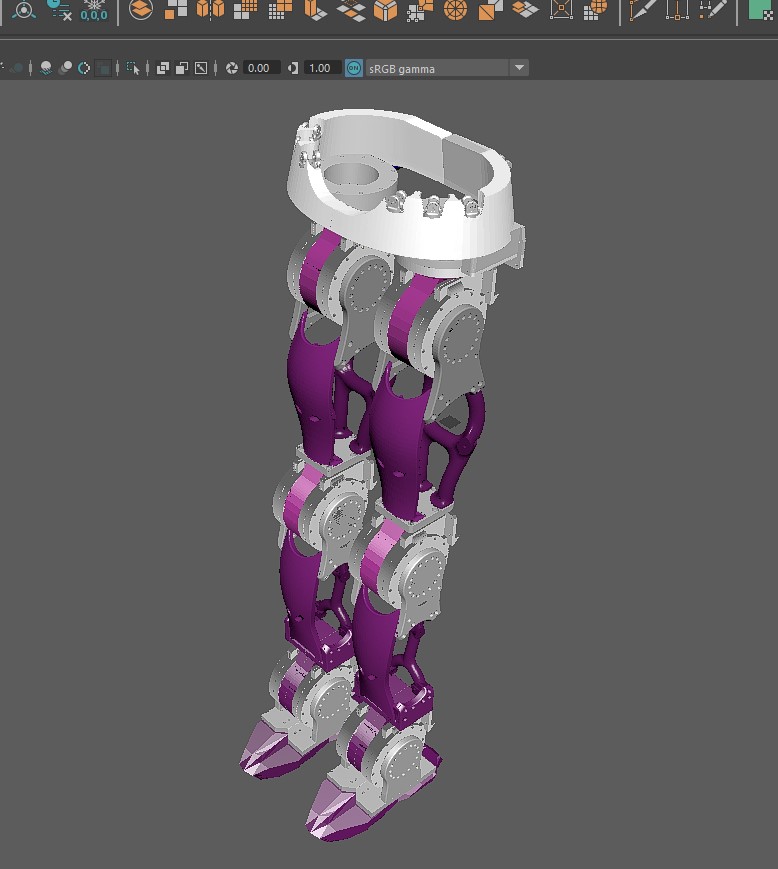
Hello Again pheww the robot legs are done and ready to 3d print each joint uses a parametric slew motor which are driven by 550 type dc motors or nema 17 stepper motors (your choice) because I just made an adapter so you can use either and they are to be used with l298n h bridjes and an ezb or converted arduinos. These are the size of a human. I am waiting to 3d print them as my printer is broke. the part is coming any day now. These legs use 12 gears and 12 dc motors but can also be driven with 6 as the motors will still turn with 6 motors.
https://www.thingiverse.com/thing:4197520/files
Enjoy There free to download

By animator28
— Last update
Discover more robots

Rickymahk2013's Mark 1 Robot
Develop robots with Synthiam, build the Mark 1 DIY robot, publish a DIY book and showcase projects at international...
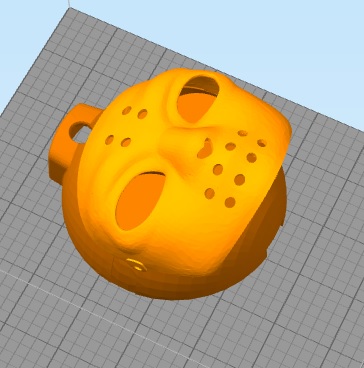
Justinratliff's Justin's Custom .Stl
Custom 3D JD hockey mask STL for JD robot face, printable and paintable for personalization in Blackhawks colors.
Animator28's AVA (Advanced Visual Android)
Human-sized open-source 3D-printed humanoid robot AVA with free Thingiverse files, built on the EZB platform, seeking...

Great look!
I am interested to know what 3d printer did you use?
Oh my gosh those are great legs! Uh, now it sounds like i'm hitting on your robot . Very cool - will they connect to the InMoov easily?
. Very cool - will they connect to the InMoov easily?
Hey guys
EzAng I use a creality cr 10 all of the files will print on a 300 by 300 by 400 build volume.
DJ Sures Thank you for the help last time. I have learned a lot from your tutorials as well I designed them for my robot https://www.thingiverse.com/thing:4166931 but I am sure they could easily be modified for Inmoov.
Inmoovs waist should roughly be the same size?
People are welcome to remix the files and I am sure people will for there Inmoovs
Can't wait to see the rest, best of luck
EZAng
"Oh my gosh those are great legs! Uh, now it sounds like i'm hitting on your robot "
I wonder what the REST of the robot's gonna look like. lol
"
I wonder what the REST of the robot's gonna look like. lol
We were looking at your robot a few minutes ago - wow!!! Everyone here is blown away. I hope you get a ton of credit for it!
DJ Sures
I hope so I always get shadowed by inmoov. But I feel there is space for more than one humanoid robot in the world. And It is always good to take a different approach to robot building I am going to use your video function to project the face or a vlc call up function via DLP mini projector. It will run on a loop idle video face animation. I have Already completed this the profile pic is the face. And then overlay when spoken to reactions and responses e.t.c
I appreciate the community here its a good boost
With 9 billion people on earth, and a robot industry that's supposed to be taking 50% of jobs... there's A LOT of room for humanoids of all types.
If anyone ever thinks one company can own an industry, while it did happen with the telephone in north america, it's not something that happens in this day of age. Specifically with robotics being such a massive massive massive massive forecasted impact.