



































Hello all, I wanted to start my own thread to discuss my Inmoov and my conversion to EZ Robot. I appreciate all the work by the MRL guys but I struggle with it. I am indebted to the help they gave me but I needed something a little more along in development with some documentation.
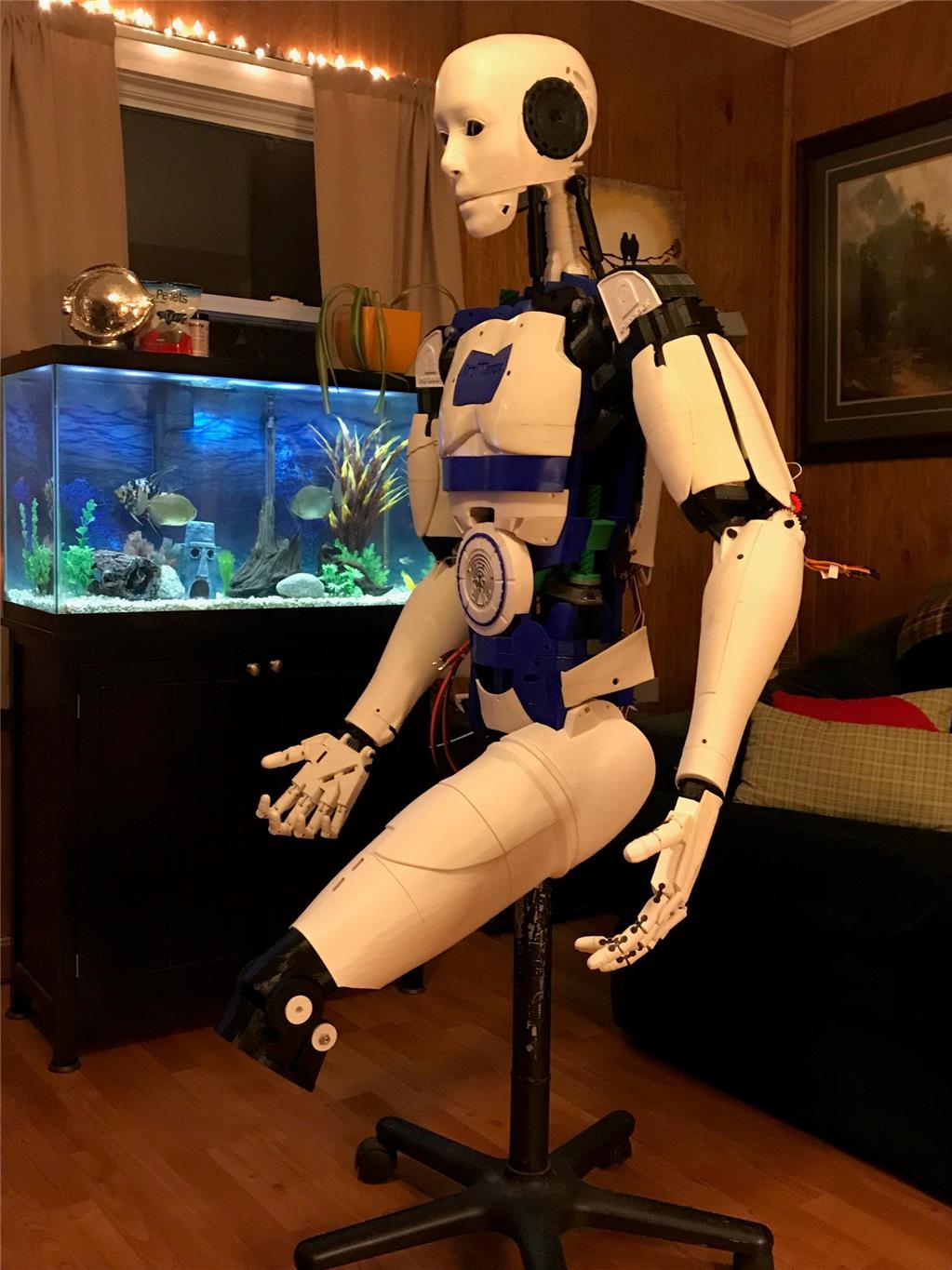
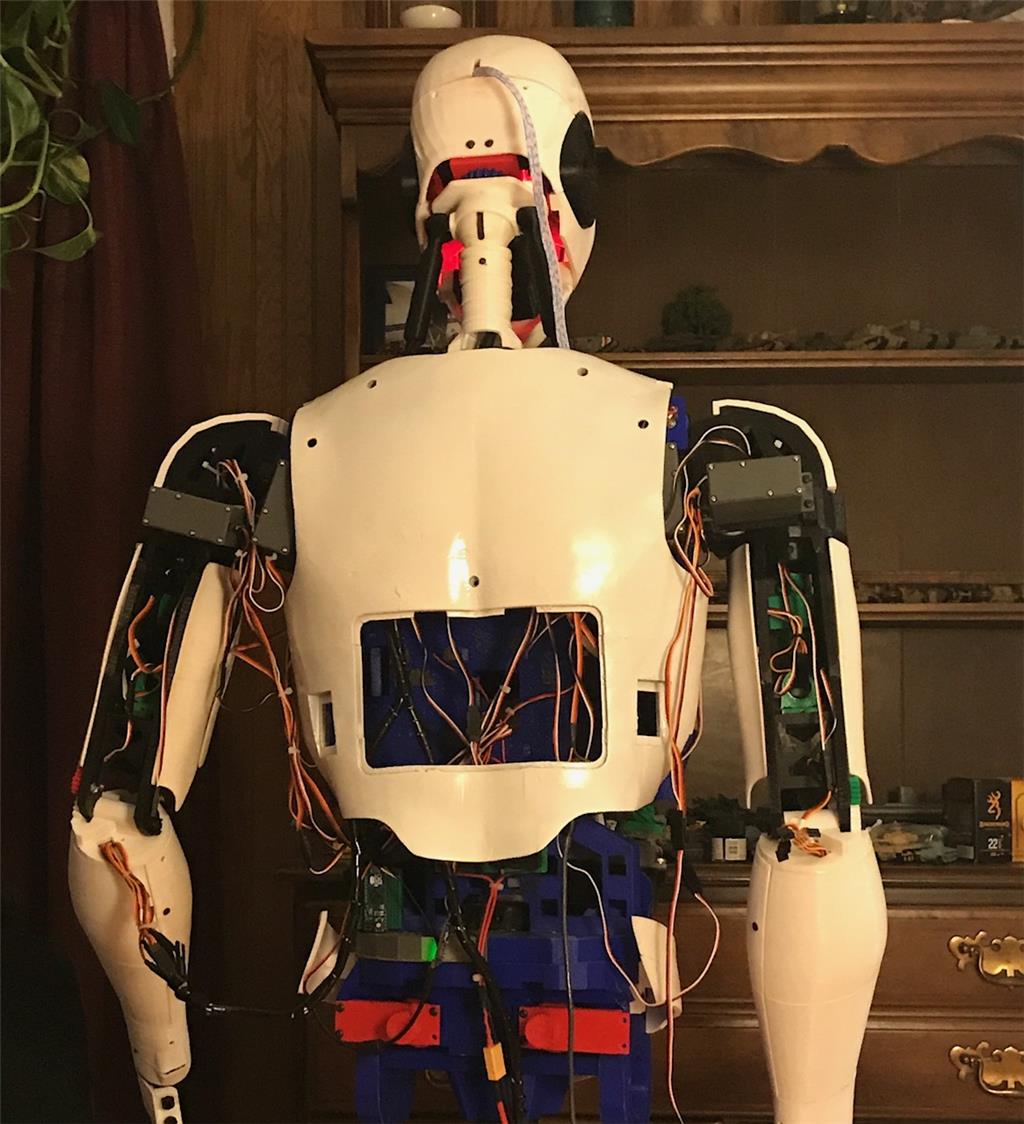
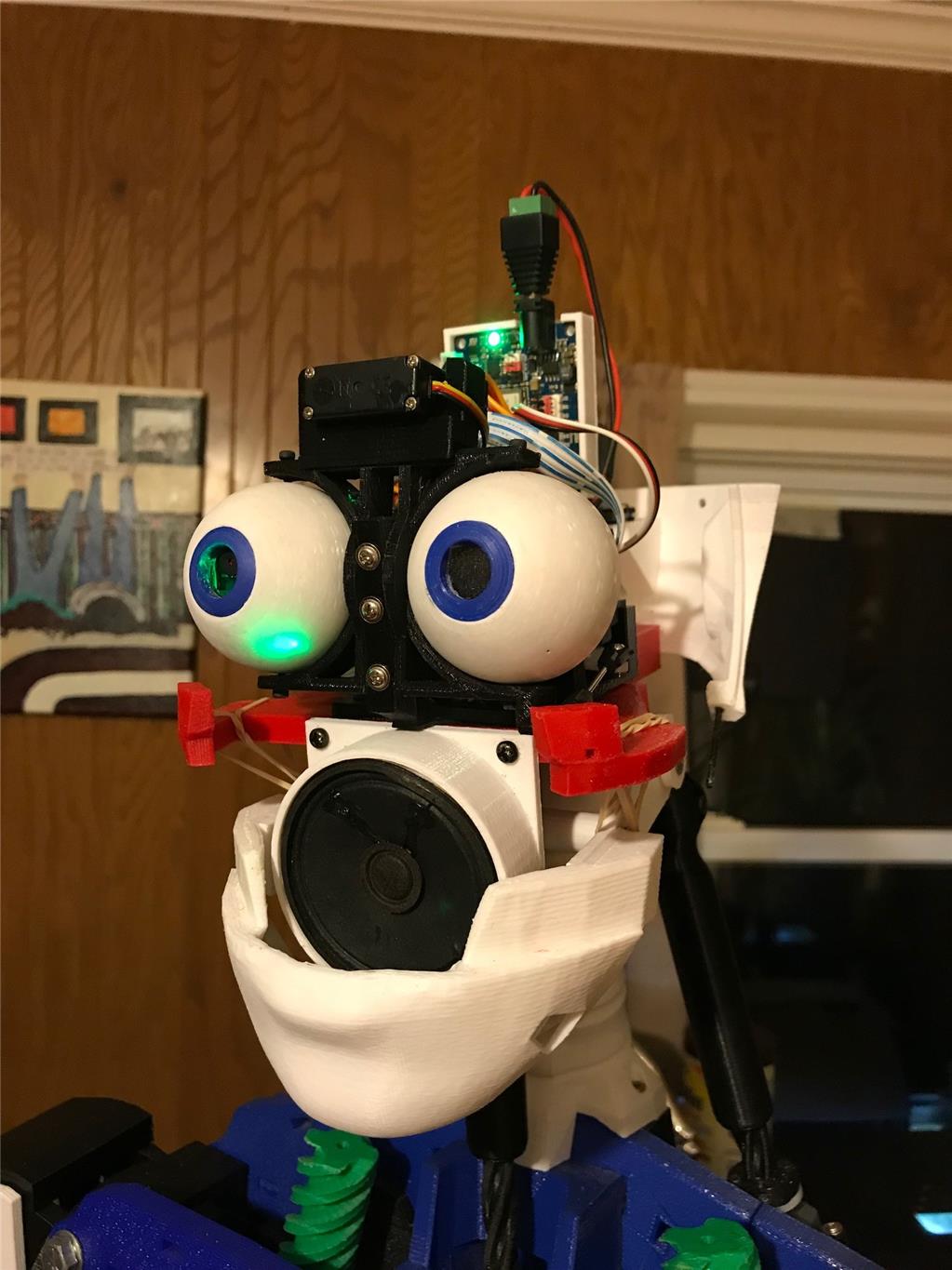
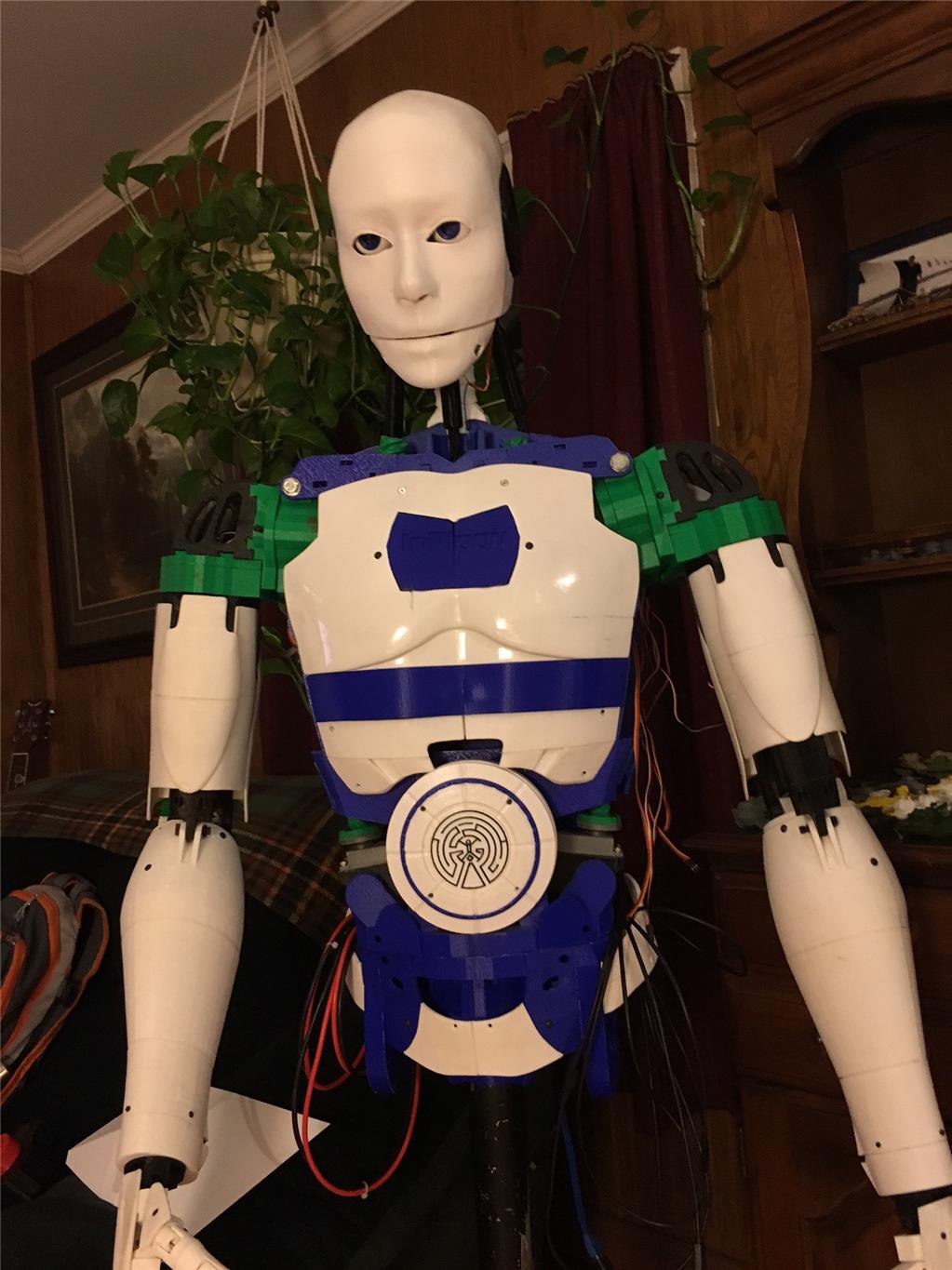
So here is my guy. Pretty standard build as far as inmoov's go.
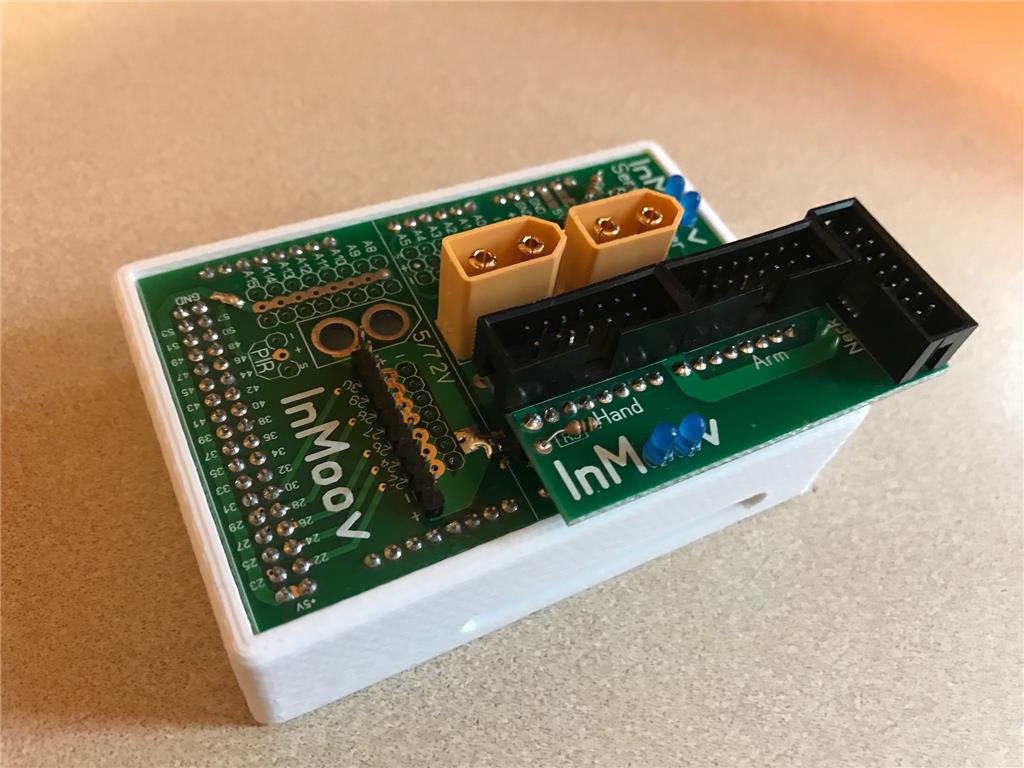
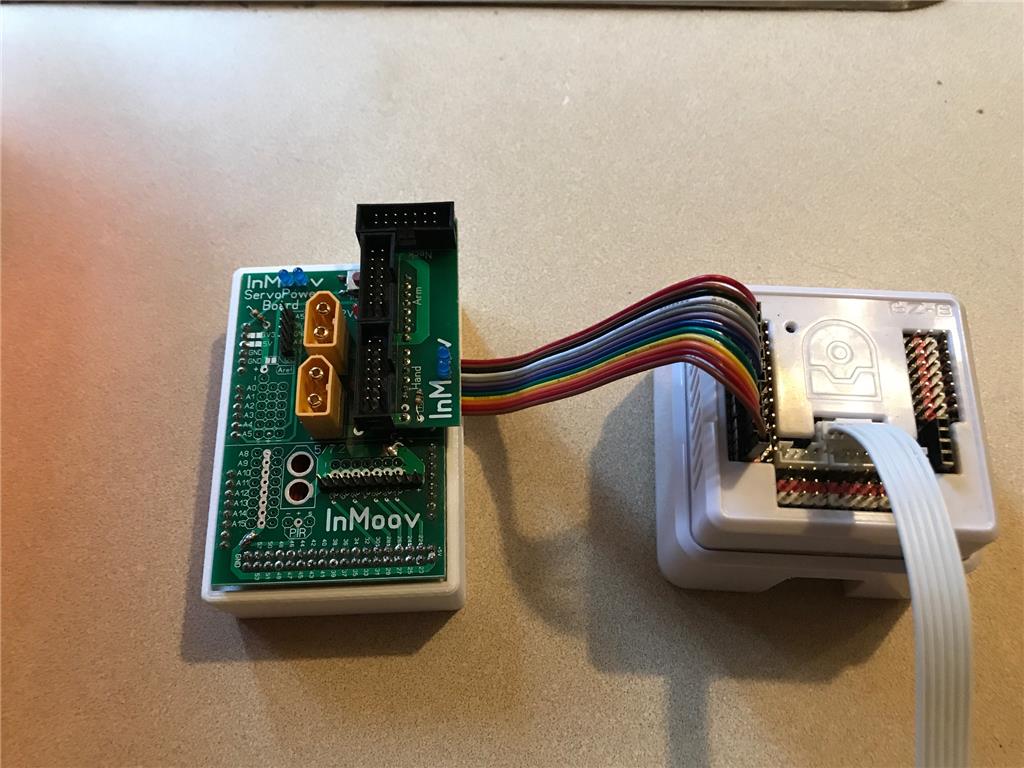
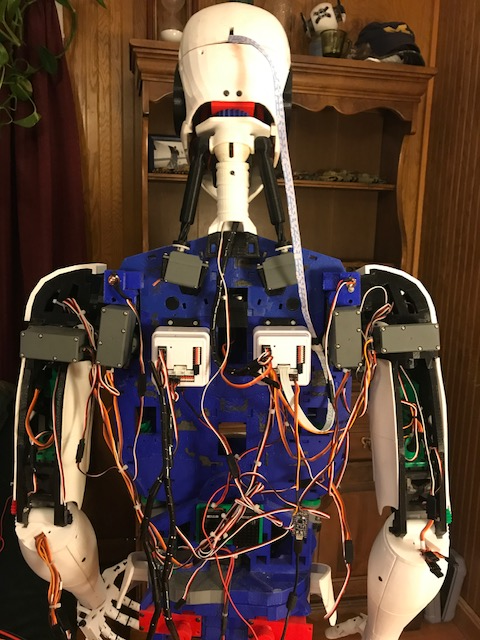
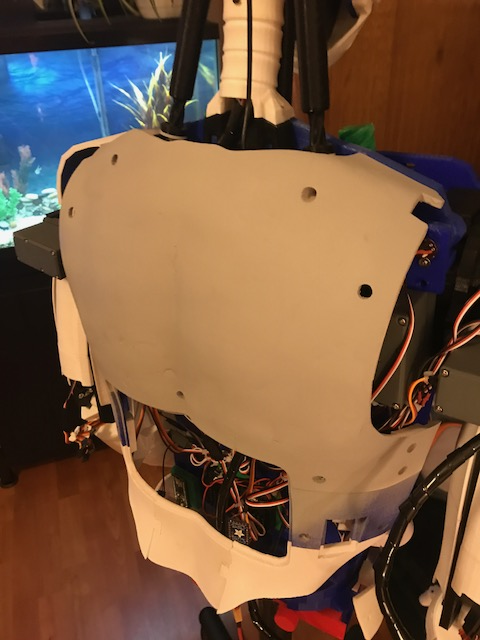
Here's the back. All the standard inmoov components. Dual 256 Megas, Nervo boards USB hub, Power supplys etc.
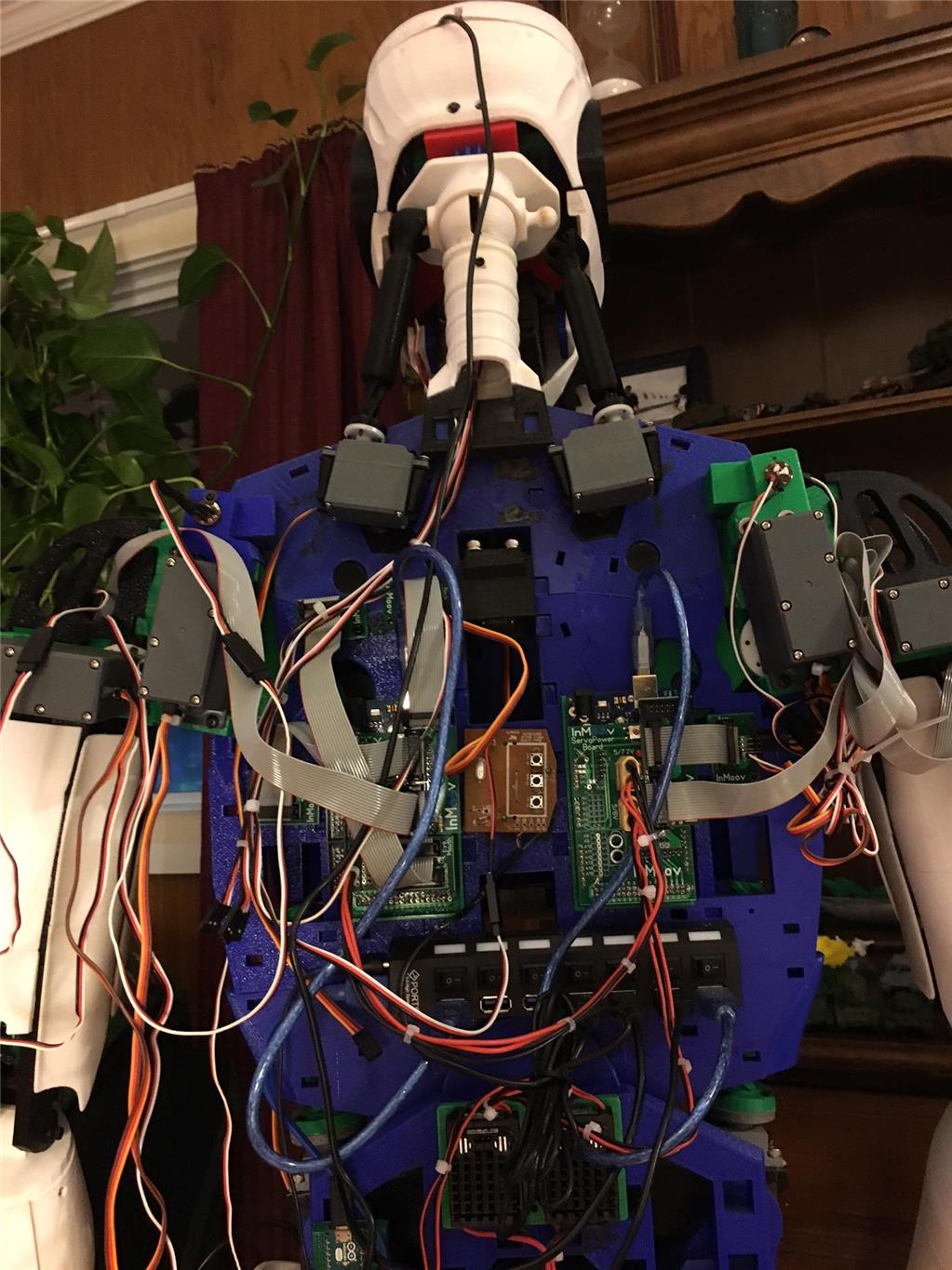
So the tear down begins. I need to clean up that wiring too. What a rats nest!
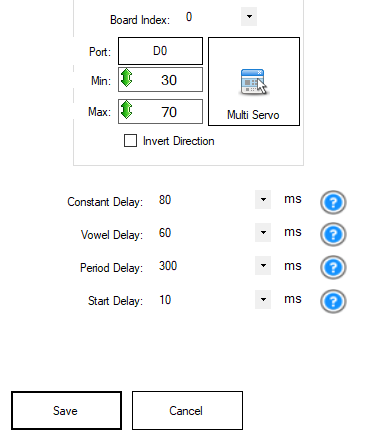
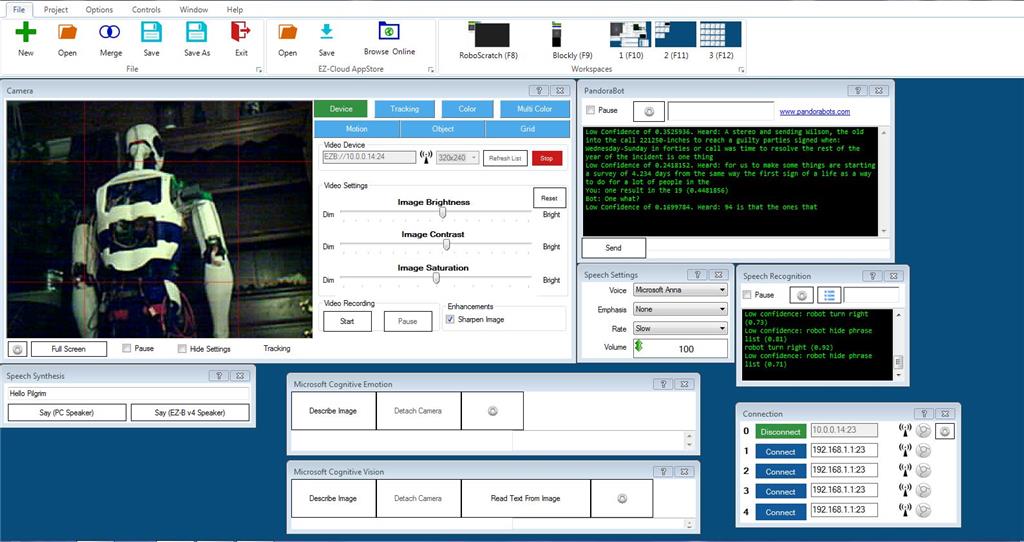
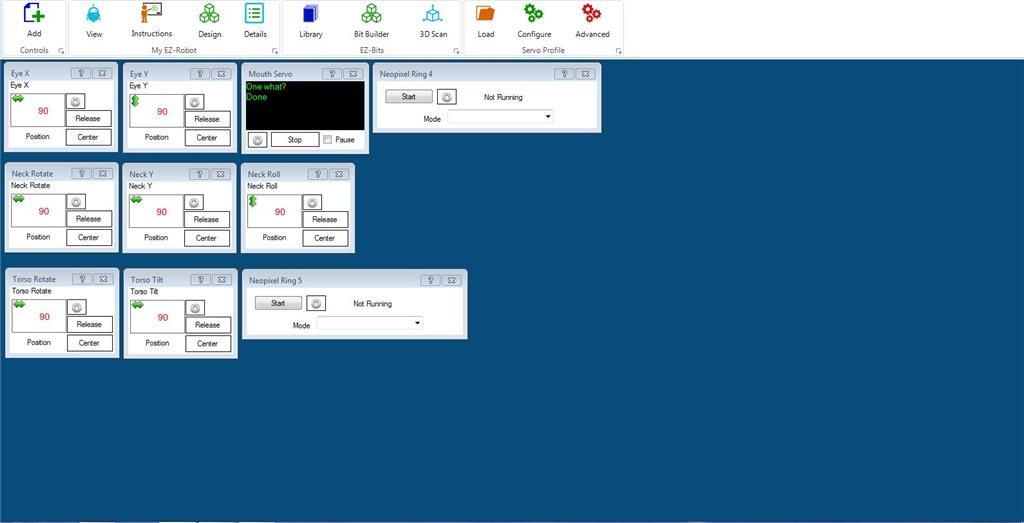
I just received my EZR controller and camera so I have no idea how to program it yet. I figured I would at least try to set up a GUI that allows me to manually move the servos like the MRL swing GUI. Five or six hours later and a few tutorials and I have this three screen model. I was easily able to add way more than basic servo control.
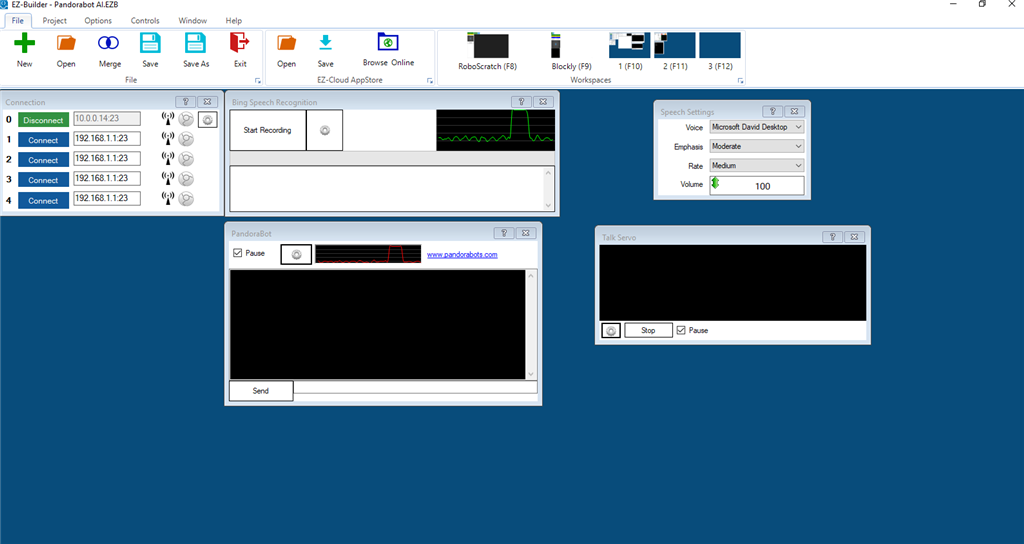
Here is the main control screen. Contains the face tracking speech functions and a custom Pandorabot for AI. Some MS cognitive stuff as well.
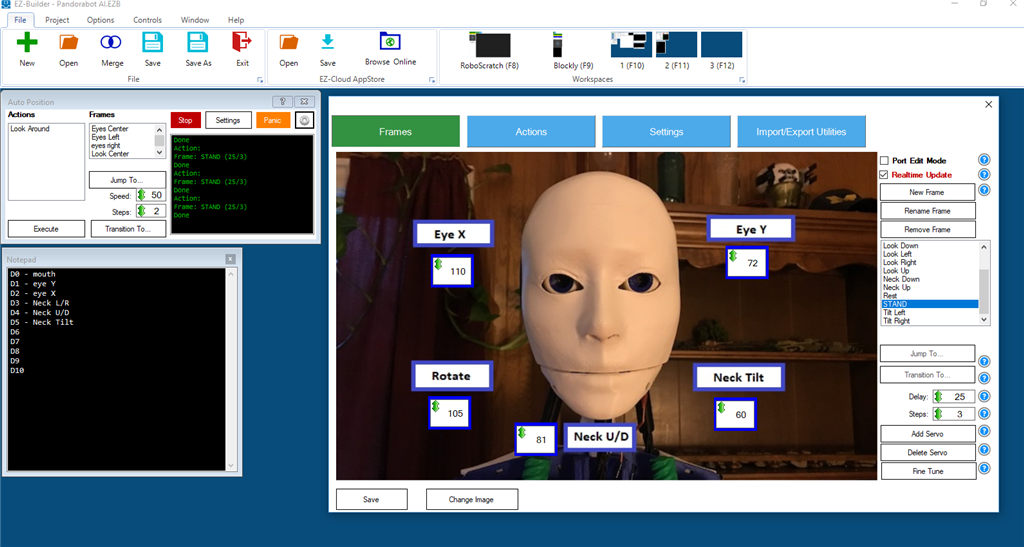
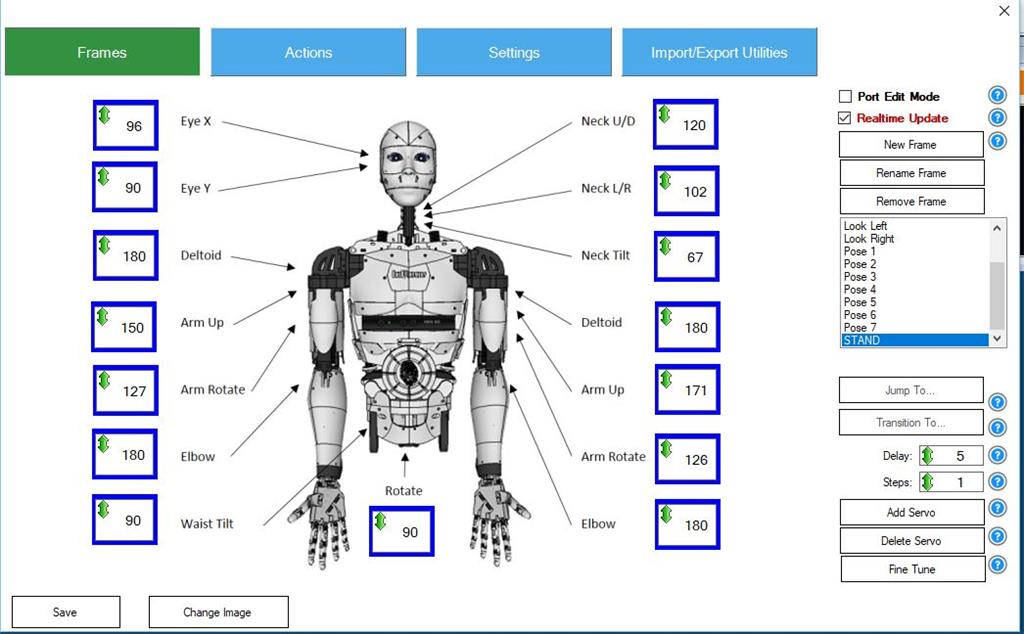
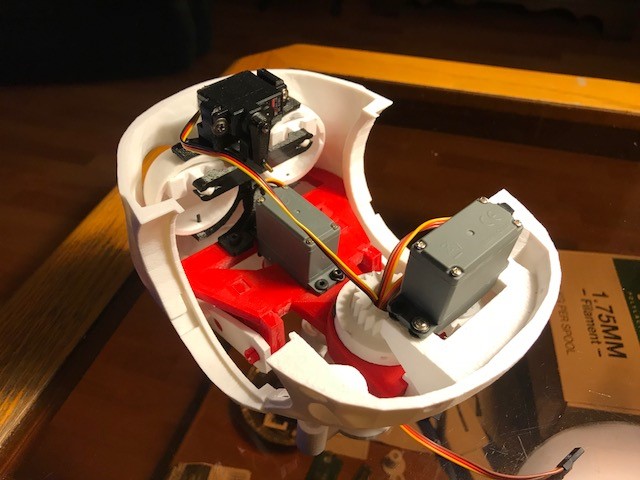
Here is the second screen. Head functions with a mouth control servo, neck, torso, and the 2 neopixel rings I have.
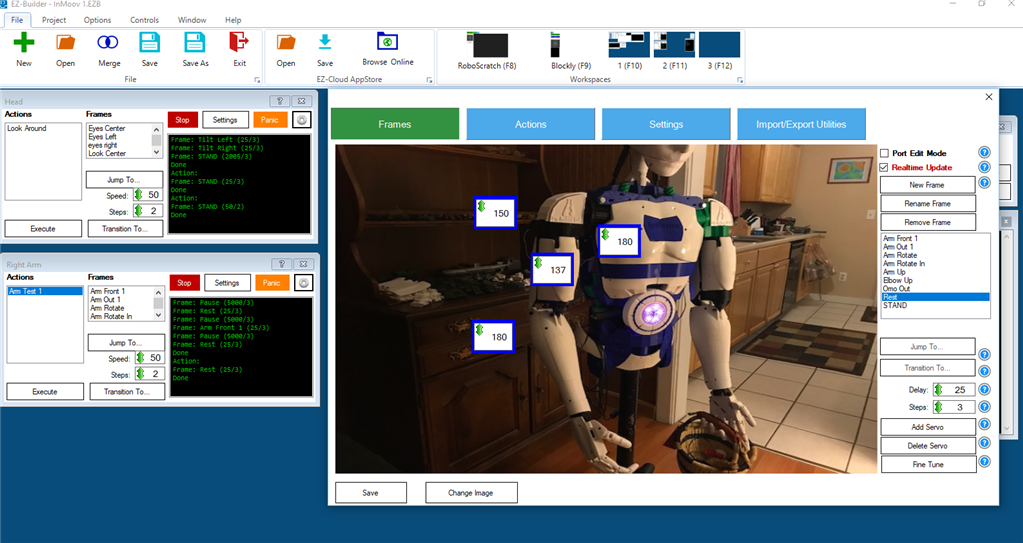
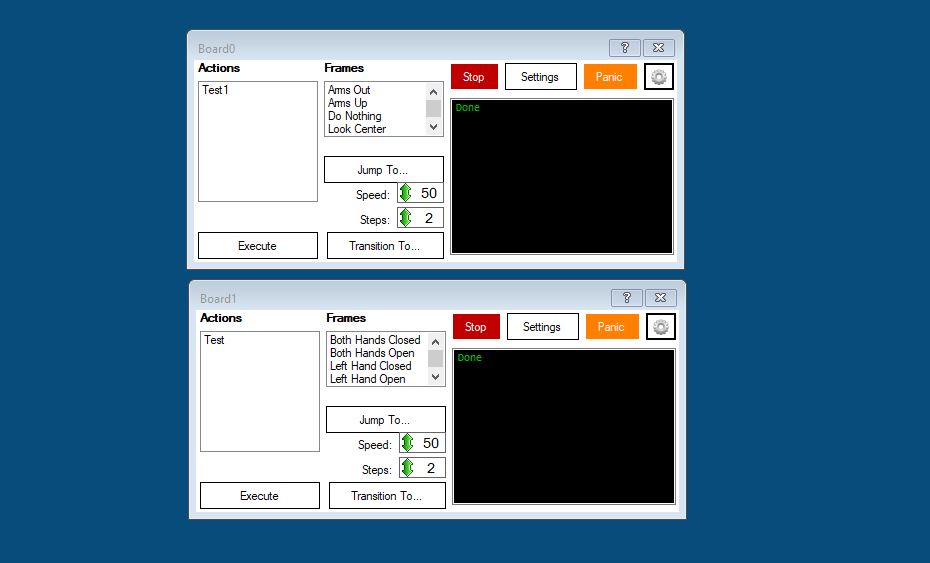
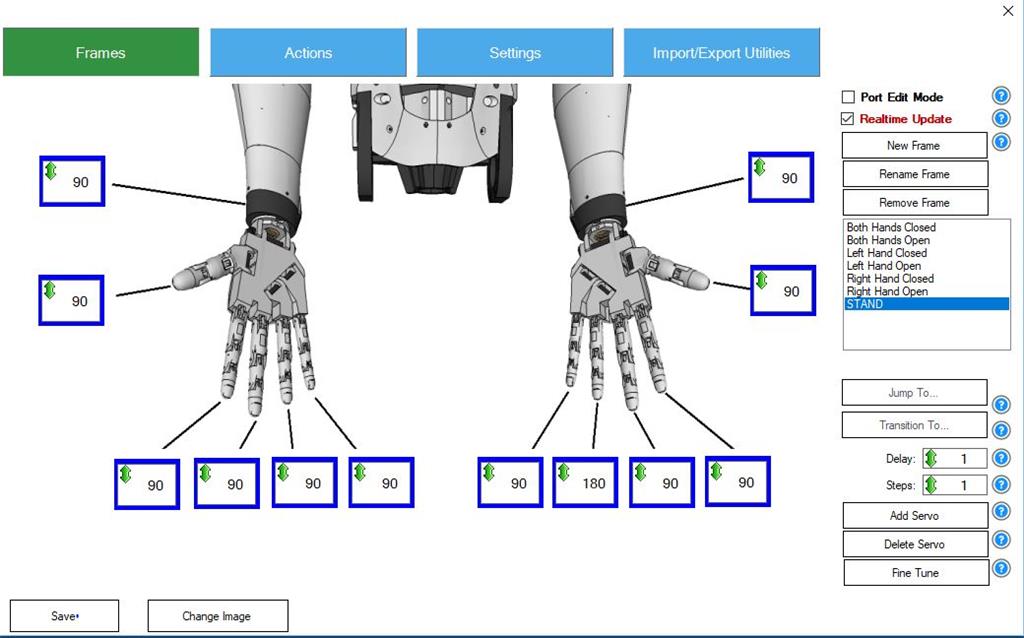
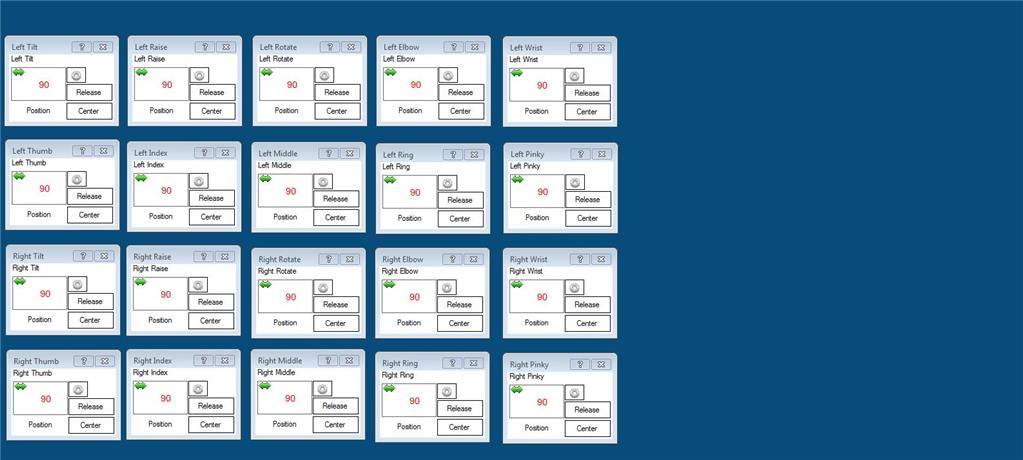
Third screen is for the arms and hands
So now I pretty much have all the same functionality I had in MRL give or take. I am pretty sure I am not doing this entirely correctly but it will come with time. Need to get into the scripting. I guess there are some tutorials to watch. So far my experience has been pretty good and in a day eclipsed my MRL progress of the last 6 months.
I'll update this thread with my progress and appreciate any feedback.
Discover more robots

Rich's Project Hearoid.

DJ's Robotis XM430 Dynamixel Arm With Open CM9.04


I hope he succeeds. It would be great to see. I was told many times that I wouldn't be able to build working, articulating, retractable arms for my B9 robot. That just made me more resolved and more so with each failure. Two years later I had a working set.
Keep your dream alive! Have fun.
@Perry_S I completely understand your perspective. I believe a walking inmoov is a software issue more than a hardware one. Lets just take a step back and remember we are melting plastic in our homes in the shapes of things designed by a guy in France. I feel the hardest part has already been overcome! Each part of the inmoov acts independently and the legs are no different. I do beleive the center of gravity is wrong and there needs to be proximity sensors regisoring the inmoovs postion in real time. We shall see. Plus I have a picture of an inmoov finger for my avitar. So talk is cheap until I complete a few things I mentioned before.
@Dave Schulpius Congraduations on your B9 robot. I readly enjoyed your videos! I believe out of all the amazing advancements going on today a walking inmoov is pretty small time. I do think it will attract more people to the joys of robotics. It is time we integrate more AI into these projects. A walking inmoov is the perfect candidate.
Best wishes!
Rick
I'm a retired Physical Therapist. We spent quite a long while studying all of the ins and outs of "gait." I'm on my third generation of failed legs (not walking yet). I'm not sure our little servos and plastic parts are strong enough or fast enough to manage the intricacies of same. When we humans go into single limb support (SLS) hundreds of pounds of force are exerted on the femoral neck to hold us up. (It's a good design, around 500,000 years old...) We are in SLS a full 60% of the time when we are moving about!
I've also had VERY POOR RESULTS using any of the MPUs (6050/9250) - even the one EZ used to make and never got back on the shelf gyro/compass/accelerometer with the software. Any success there may have to built on Arduino sub-processing and sending signals to ARC
I may try servo driven robotic pistons - there are some that are strong enough. My main thrust has been to create a full weight shift to the left and right so the InMoov (with the upper body mounted and in place) is standing on one leg (so it can move the other leg forward). This is tricky because in humans, walking is a process of FALLING forward and catching ourselves at each step... (InMoov is NOT GOOD at falling...)
Thoughts?
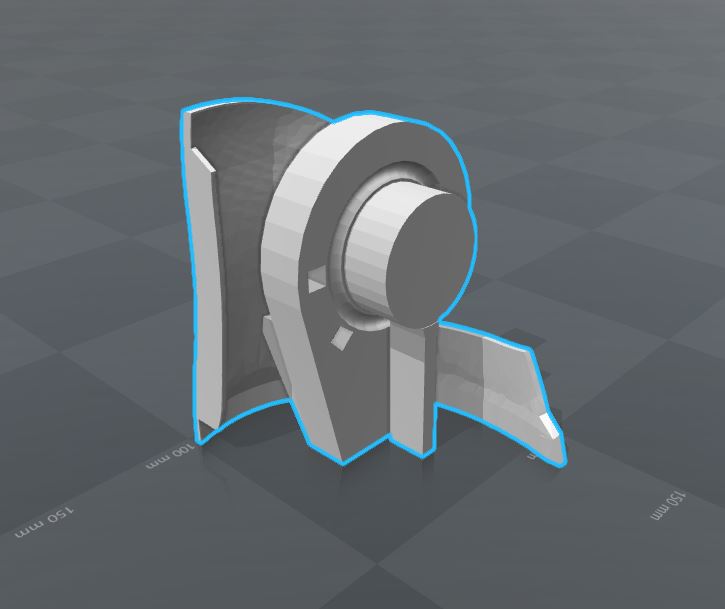
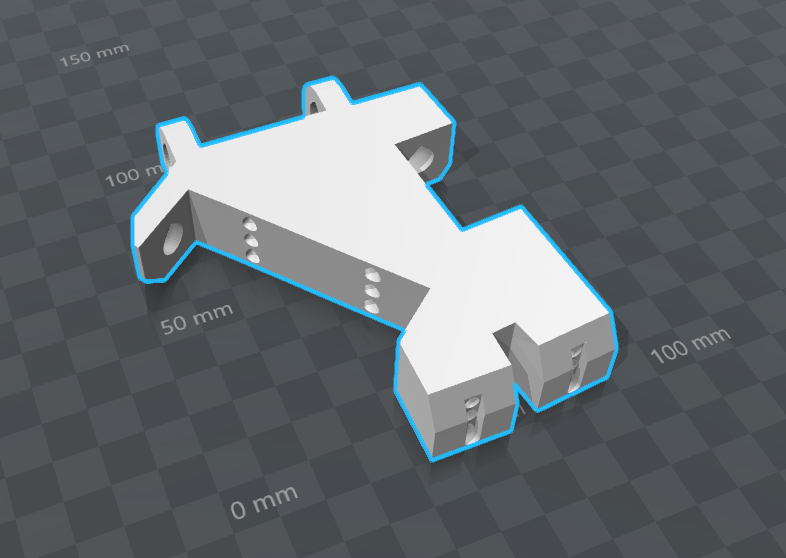
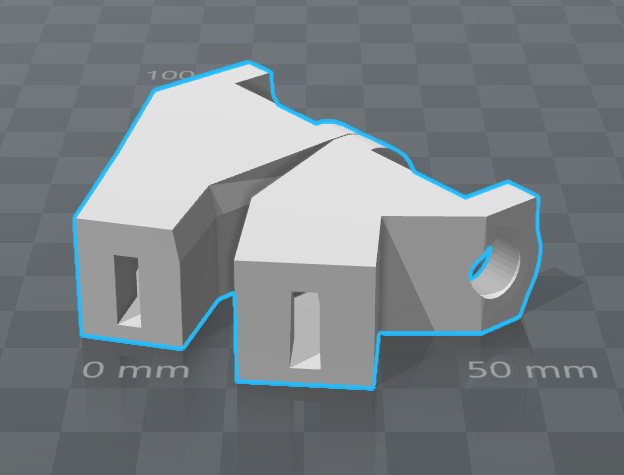
Hips/Ankles: servo Driven 20:1 Planetary Gearset (a derivative of another design on Thingiverse) https://www.thingiverse.com/thing:2782154
I have an inmoov robot and early on when the waist was completed, I needed a new pole stand. while attaching the robot to the stand I lost grip and inmoov fell damaging the right shoulder, lots of work rebuilding. falling with a plastic robot, is not an option. using plastic for working legs will never work. check out Sophia the robot gets legs and that is how it will be done more metal used and a larger foot platform to prevent falling. check out james bruton walking robot. and that will be how we as DIY robot builders will achieve walking legs for inmoov. just because inmoov is a 3d printed robot does not mean the legs have to be all plastic.
This is all very exciting. Looks like you guys are very close to cracking this nut. Don't give up or get too discouraged. Maybe @nallycat is right. Perhaps a metal based 3D print filament will be required to straighten the legs (or maybe just the joints?).
The work @mayaway has done so far is amazing. My first thought was "faster MPU". Then later in mayaway's post he mentioned "Arduino sub-processing". Yes! Also an onboard super fast computer and not have to deal with the latency built into WIFI to the EZB.
Just spitballing here. Good luck guys. You all know more about these issues then me.
I think the legs should be all metal internally with a plastic covering just for looks. have a look at the biped project it uses a android device like a cell phone with it's sensors to achieve balance and stability. connected to an arduino mega, for programming. mayaway why not copy James Bruton's robot legs he seems to have achieved where others have failed.
@nallycat Yup - James is who got me inspired in the first place. Robot X #8 Shows the piston actuators I may move to for weight shifting. James doesn't provide enough information to replicate. Now he's abandoned Robot X and moved on to an open source dog (which may be replicable) Robot X only walked accidentally like a washing machine throwing itself back and forth to niggle across the room. Not what I'm after, if anything, I'd like the InMoov to weight shift, lift one leg, move it forward, set it down, then weight shift over that leg, and move the trailing one - even a Parkinsonian shuffling gait would be ok - slow and steady as she goes.
My plastic 3D Printed leg parts are strong enough to hold together - what I need is the strength to hold the top half of the InMoov up while one leg is lifted. Shifting InMoov's weight over one leg is not the problem. Once lifting the opposite leg starts, my InMoov sags - the planetary gear system doesn't have the torque to stop it. So linear actuators like this 4" Stroke 115 lb Thrust Heavy Duty Linear Actuator may do the job... Then if the plastic starts flying in every direction some additional parts may need to be metal...
@mayaway I think your Inmoov legs are exceptional! James definitely nailed it. If you are looking for a completely mechanical solution that is the ticket. I am personally looking for a half mechanical and half "self returning" system. Similar to our hand. The tendons close the hand naturally but we can apply force when needed. We also need to apply force to open it. This build elasticity into the movement. I don't see a lot of "bounce" in many biped robots. I do see them staggering around. I think James is your key. You can reach out to him and I am sure he will send you all the files you want. I tried to get his email address from this youtube contact section but it wasn't working.
I have posted a sketch of my finger sensor idea tittled Sam Inmoov Finger Sensor Made Easy
https://synthiam.com/Community/Questions/11653
Let me know what you think. It is extremly simple and requires very little work.