



































Hello all, I wanted to start my own thread to discuss my Inmoov and my conversion to EZ Robot. I appreciate all the work by the MRL guys but I struggle with it. I am indebted to the help they gave me but I needed something a little more along in development with some documentation.
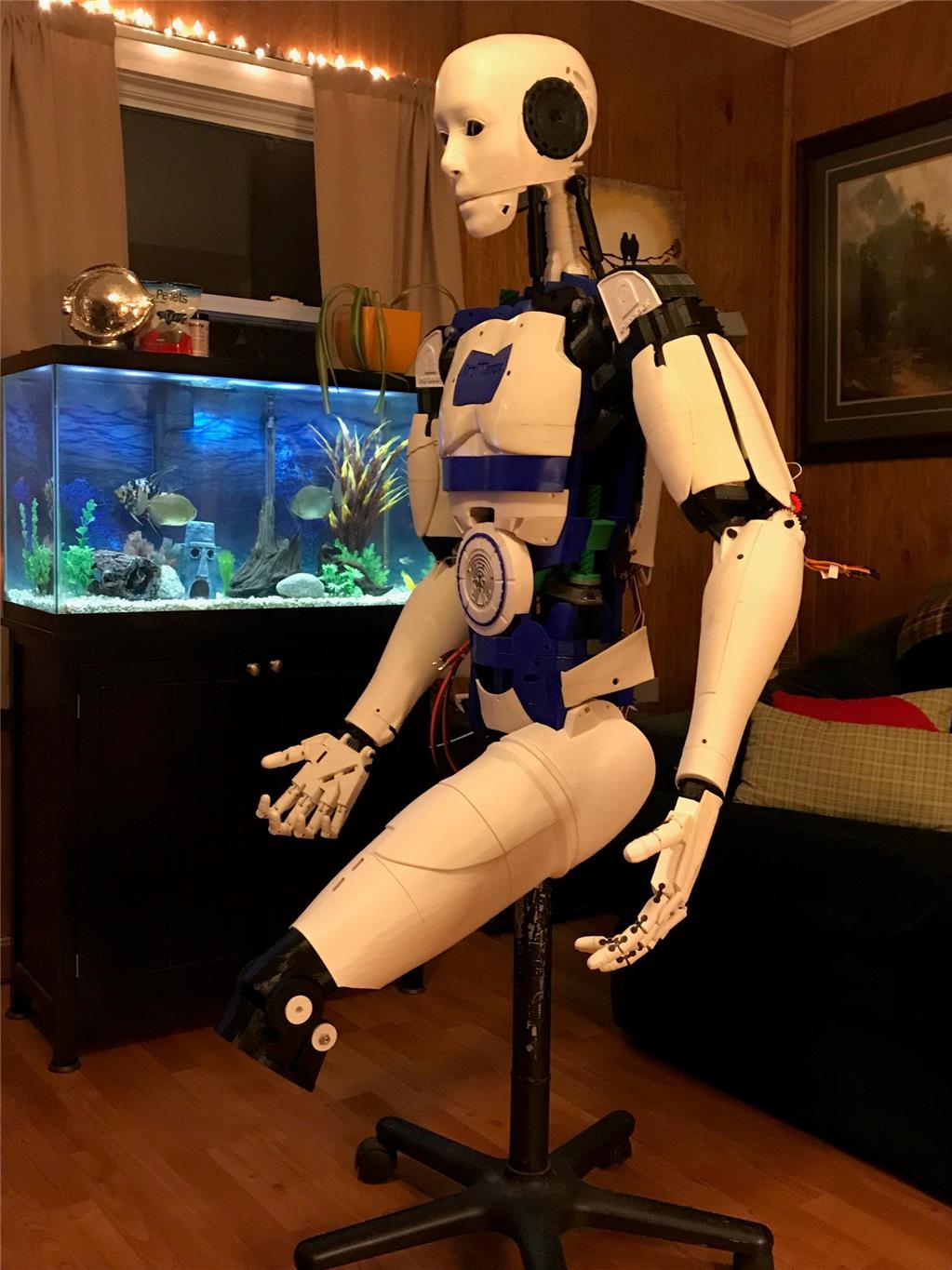
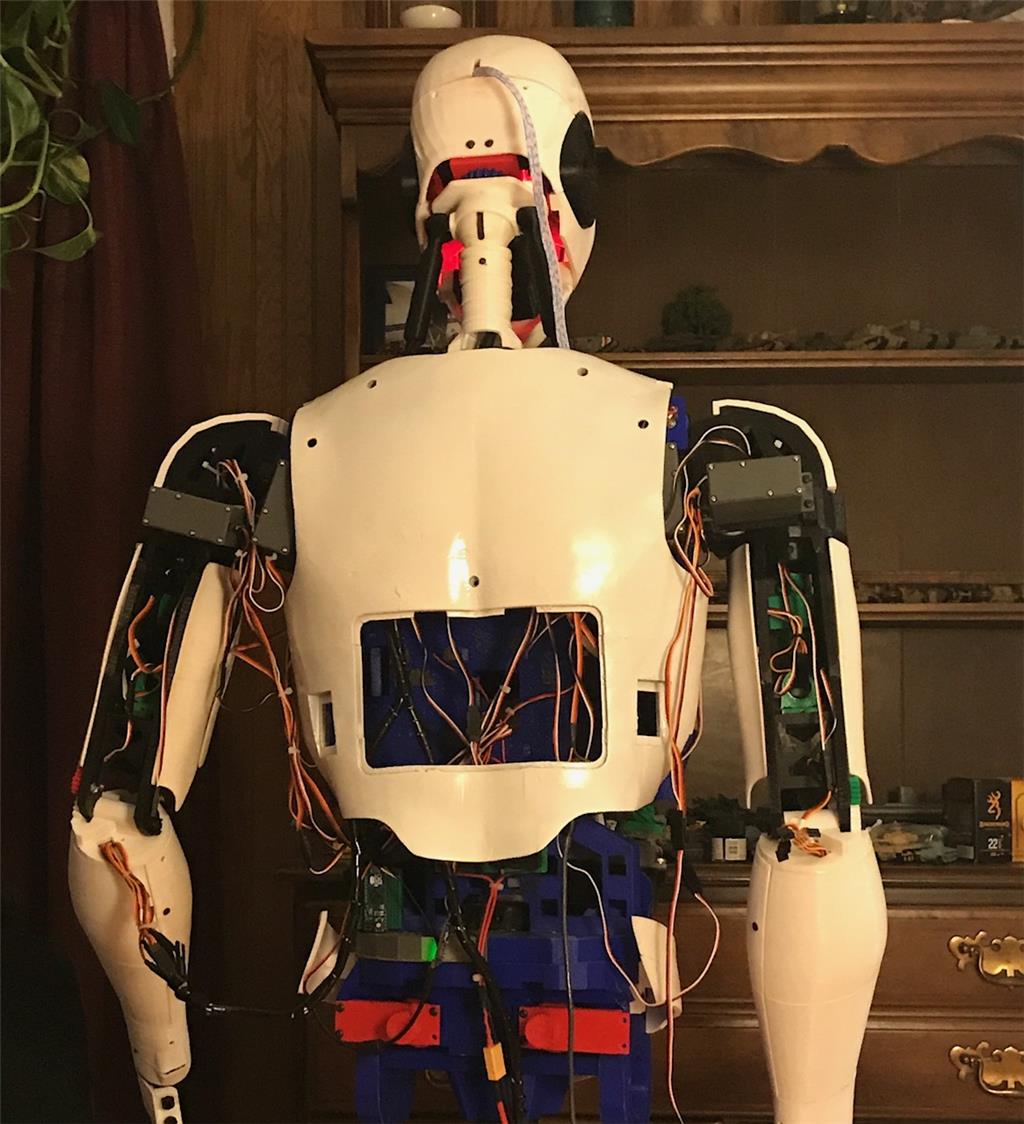
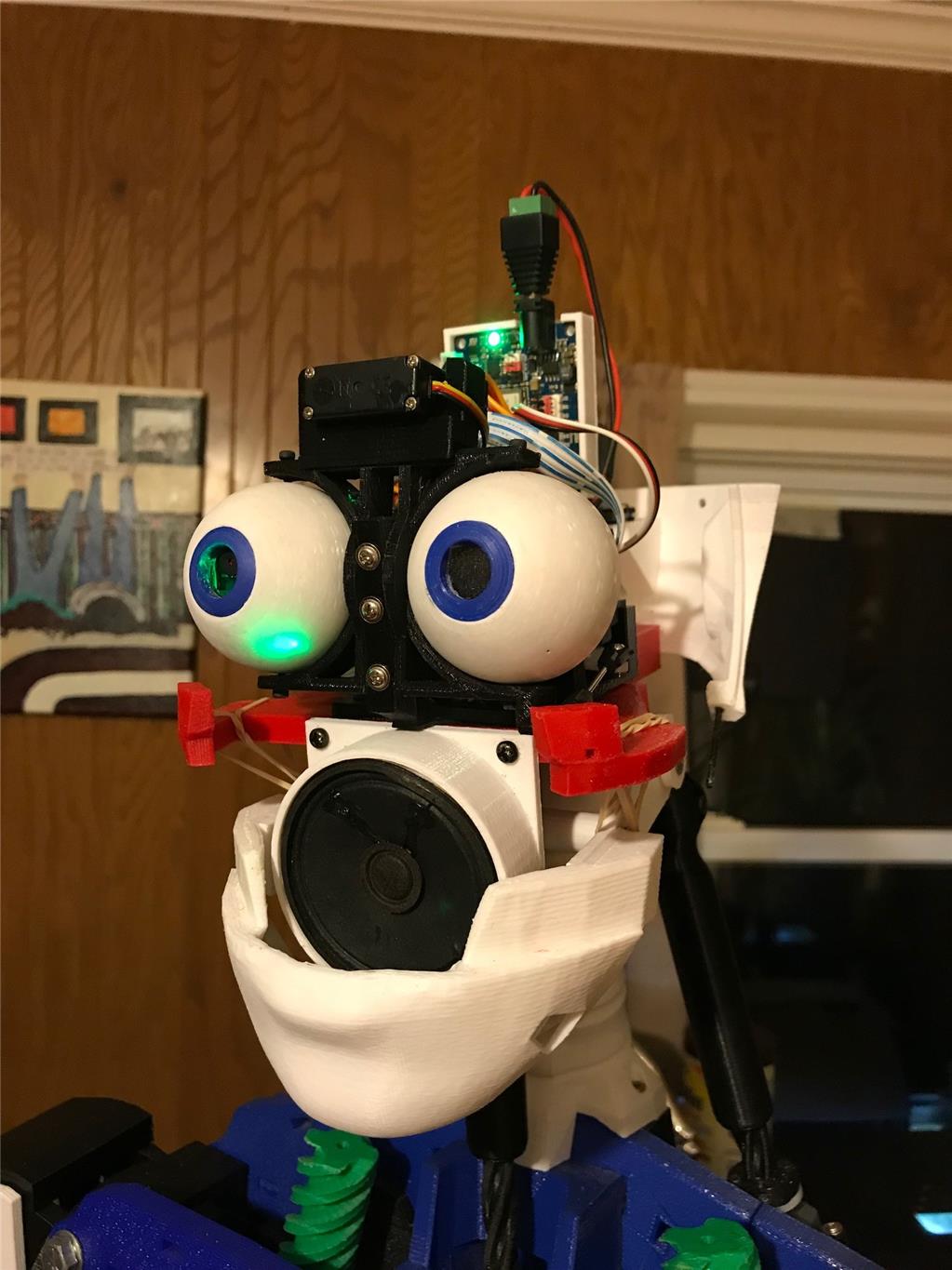
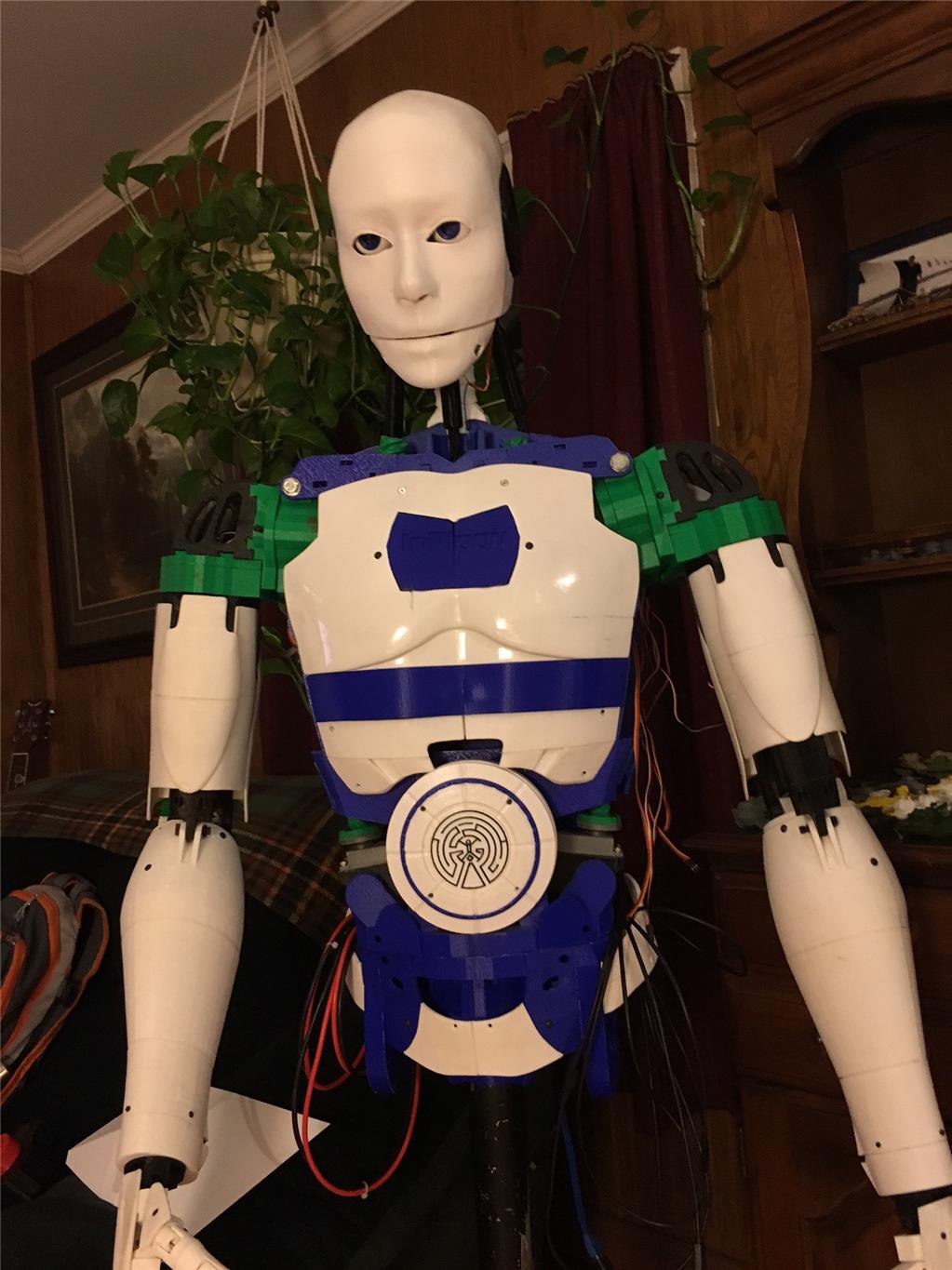
So here is my guy. Pretty standard build as far as inmoov's go.
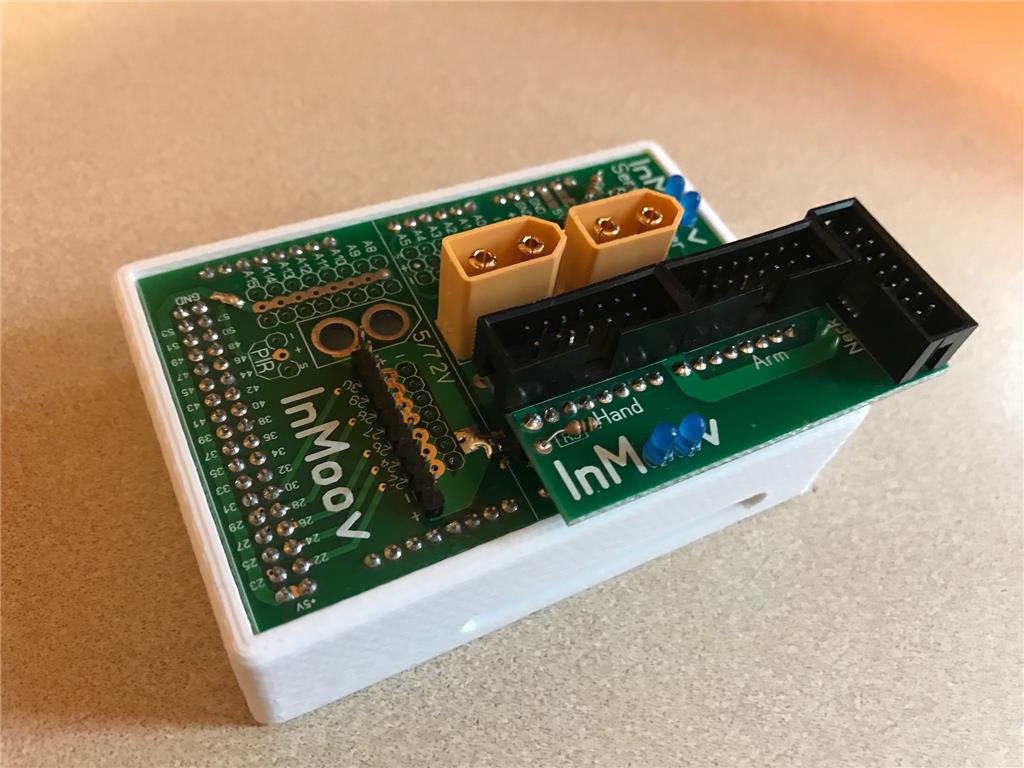
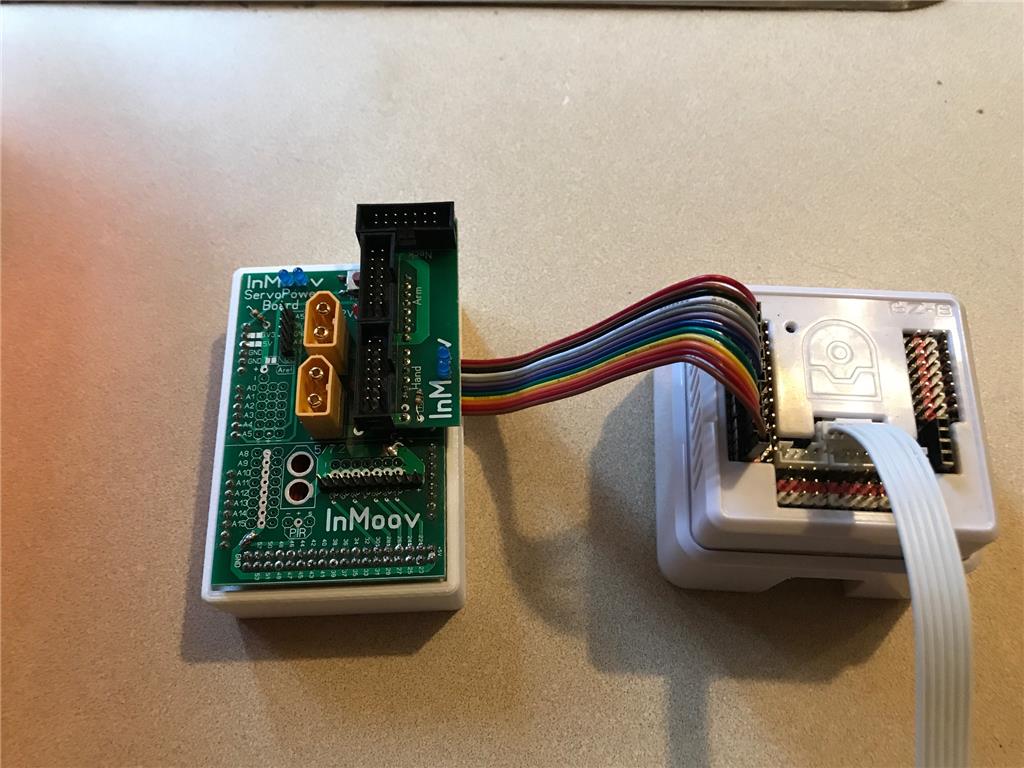
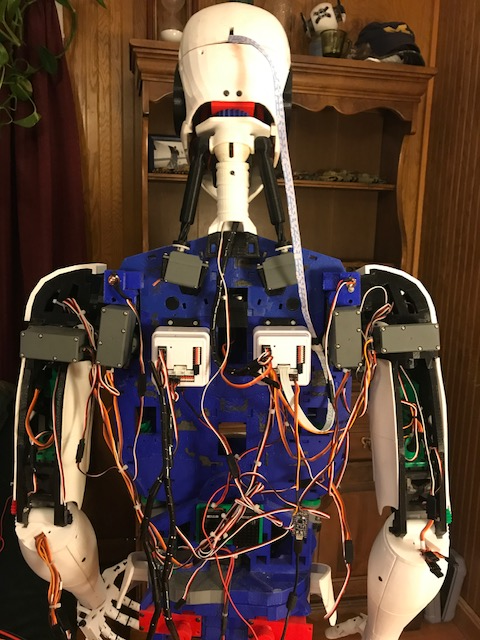
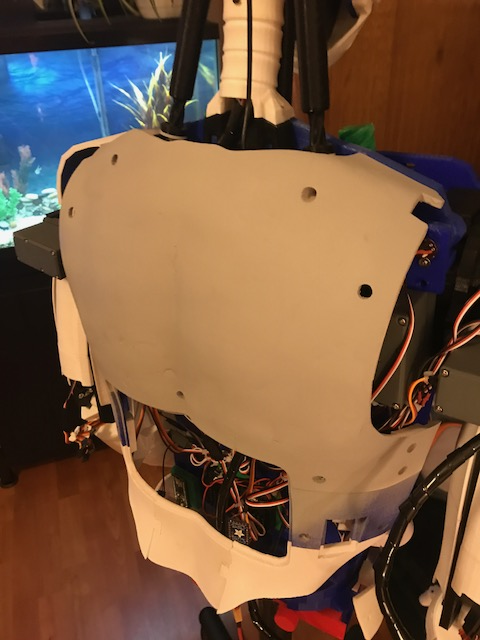
Here's the back. All the standard inmoov components. Dual 256 Megas, Nervo boards USB hub, Power supplys etc.
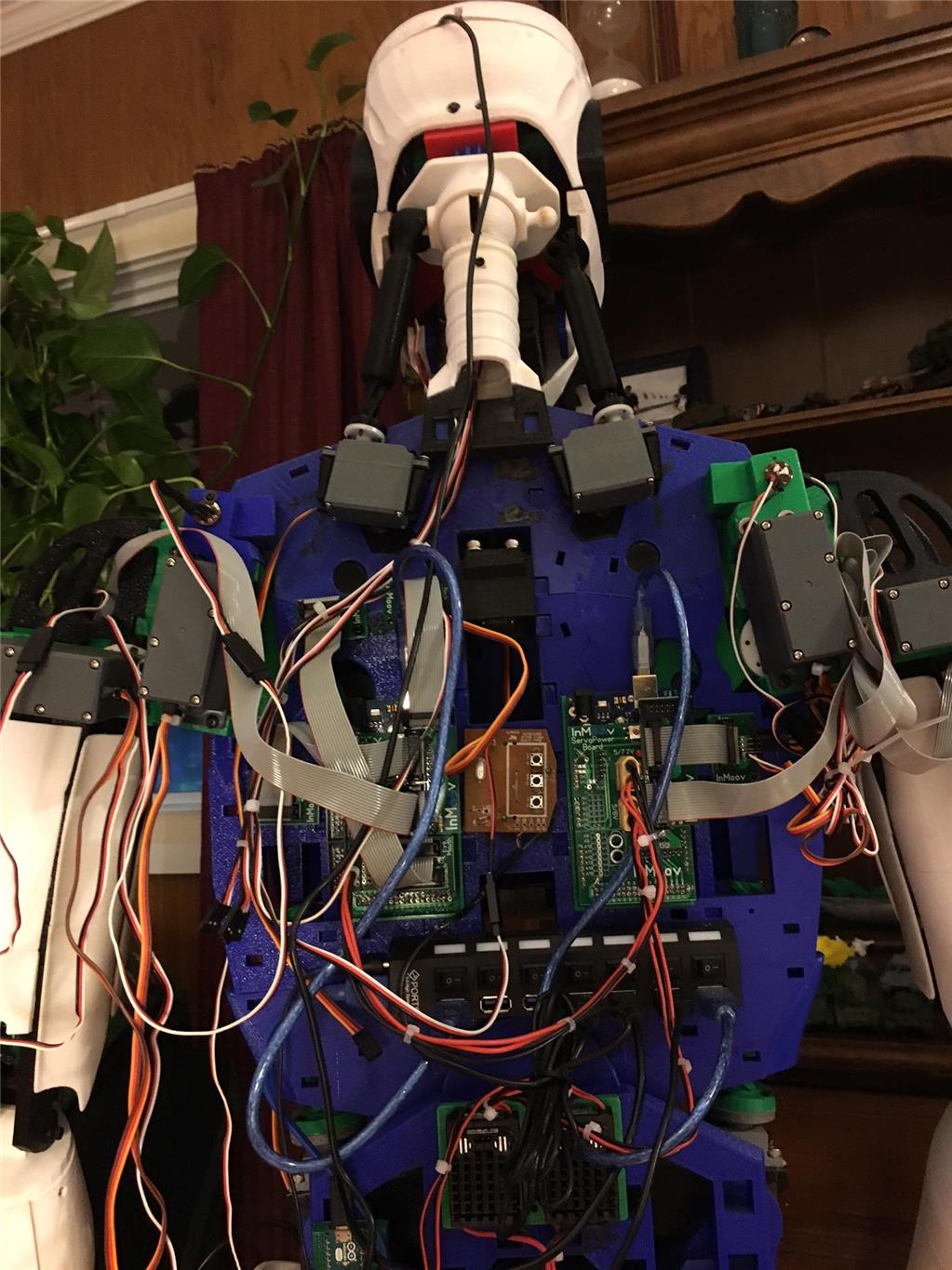
So the tear down begins. I need to clean up that wiring too. What a rats nest!
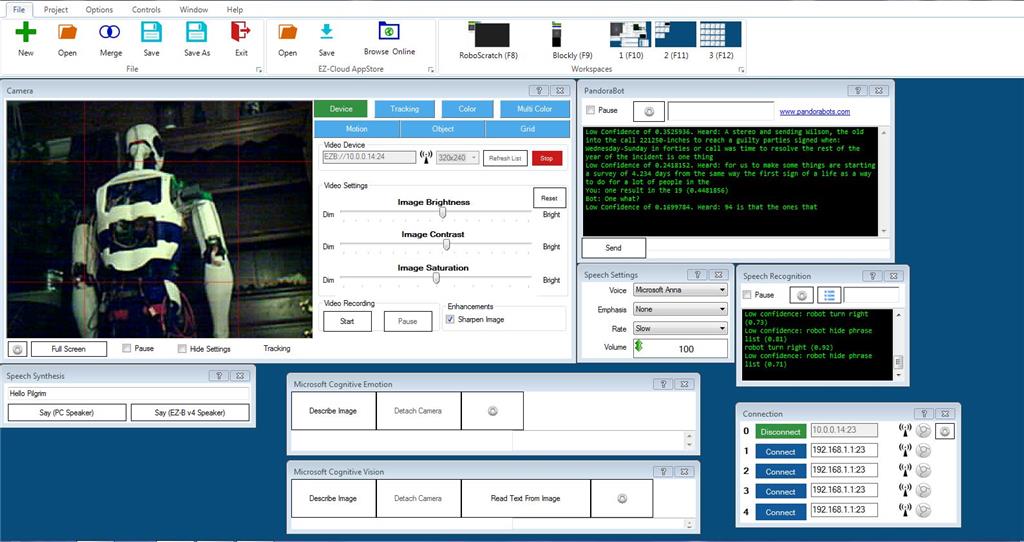
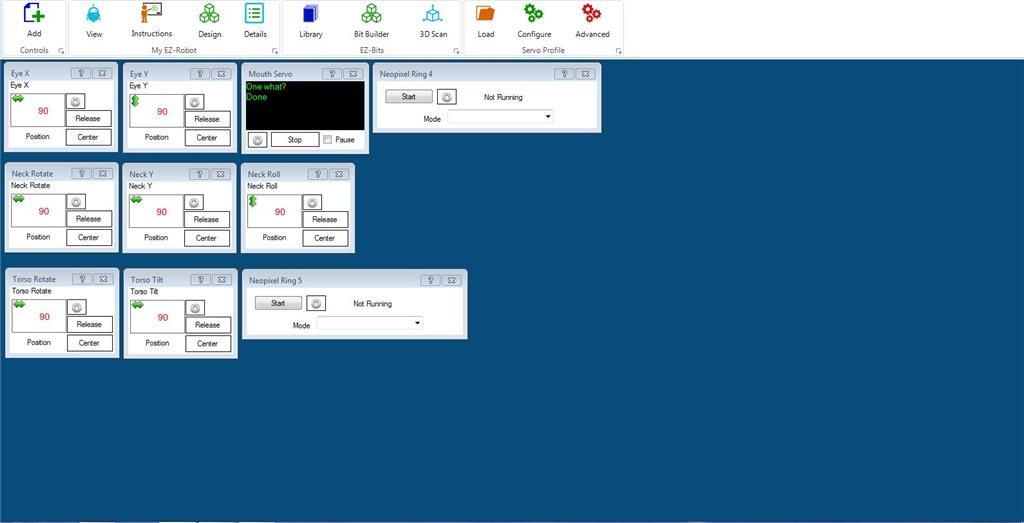
I just received my EZR controller and camera so I have no idea how to program it yet. I figured I would at least try to set up a GUI that allows me to manually move the servos like the MRL swing GUI. Five or six hours later and a few tutorials and I have this three screen model. I was easily able to add way more than basic servo control.
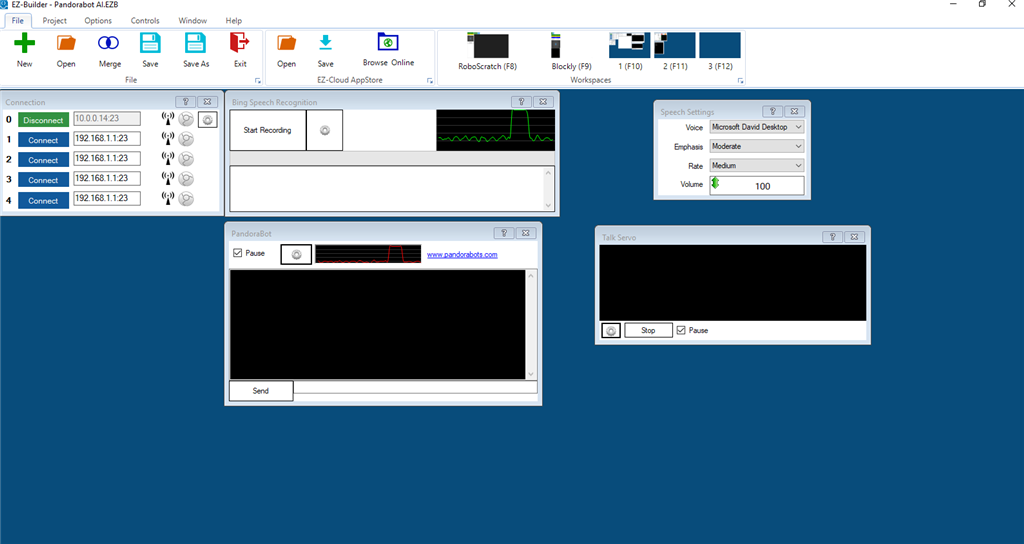
Here is the main control screen. Contains the face tracking speech functions and a custom Pandorabot for AI. Some MS cognitive stuff as well.
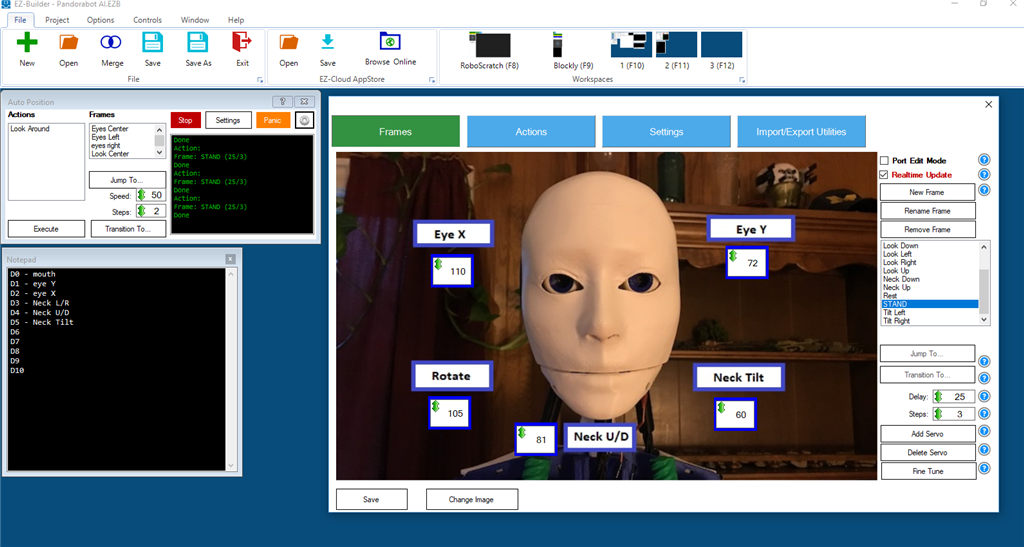
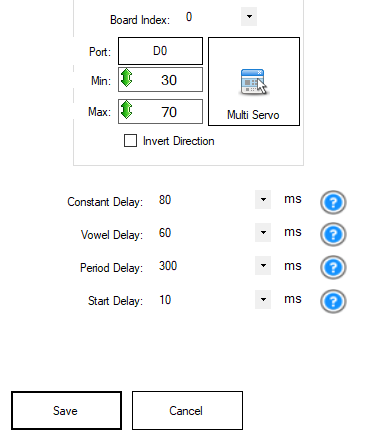
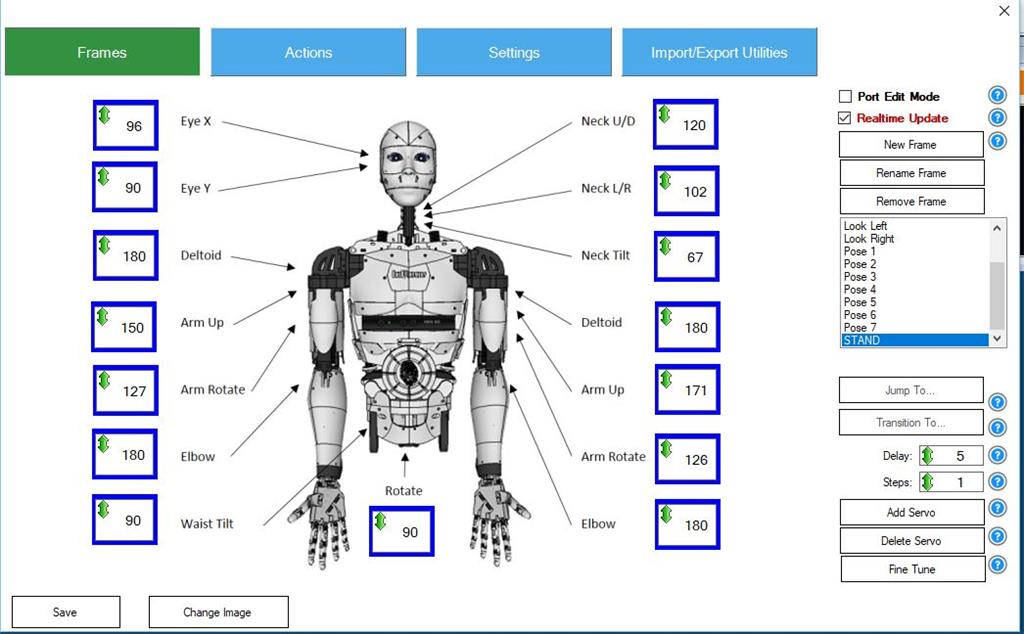
Here is the second screen. Head functions with a mouth control servo, neck, torso, and the 2 neopixel rings I have.
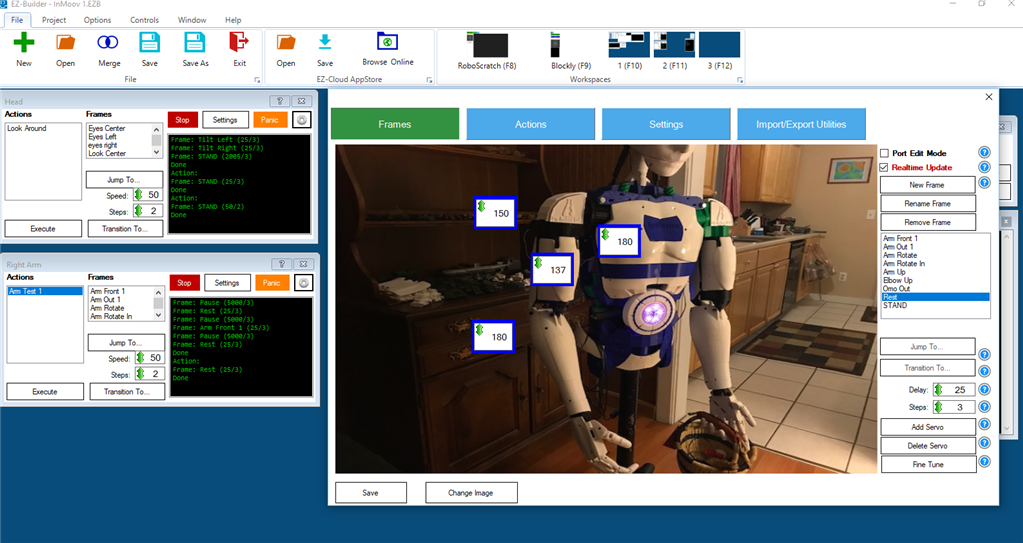
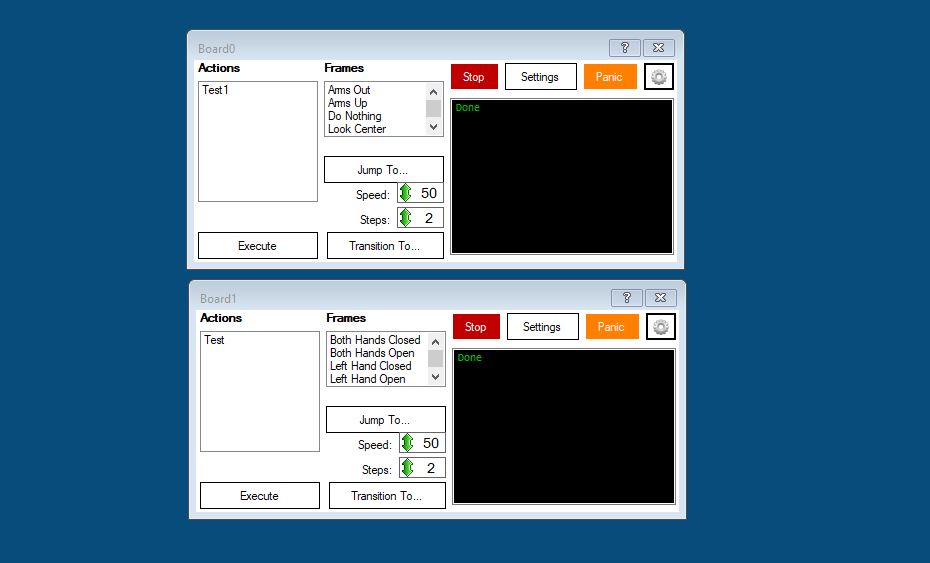
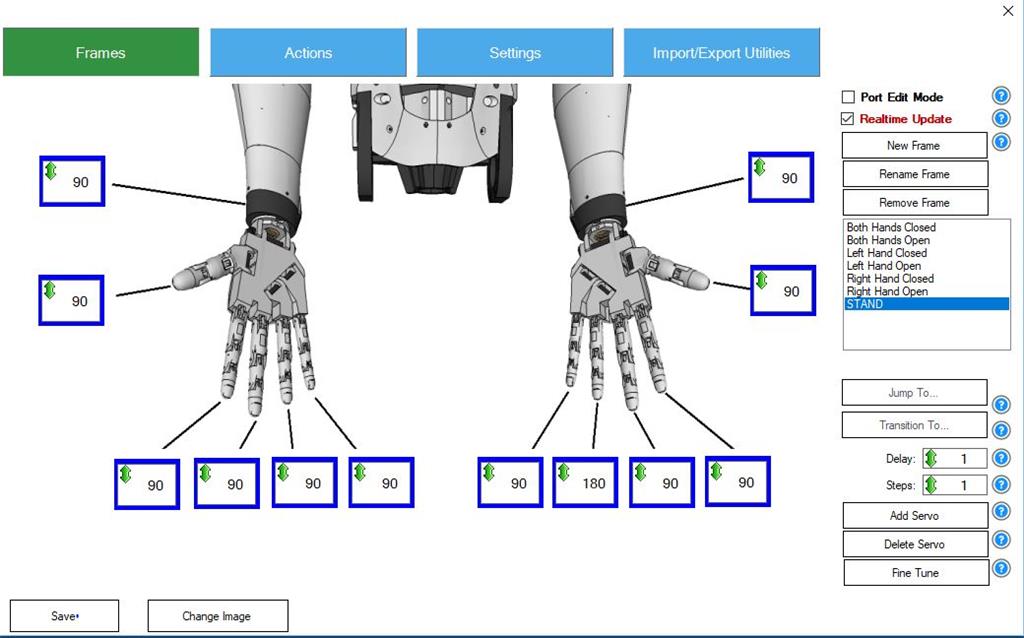
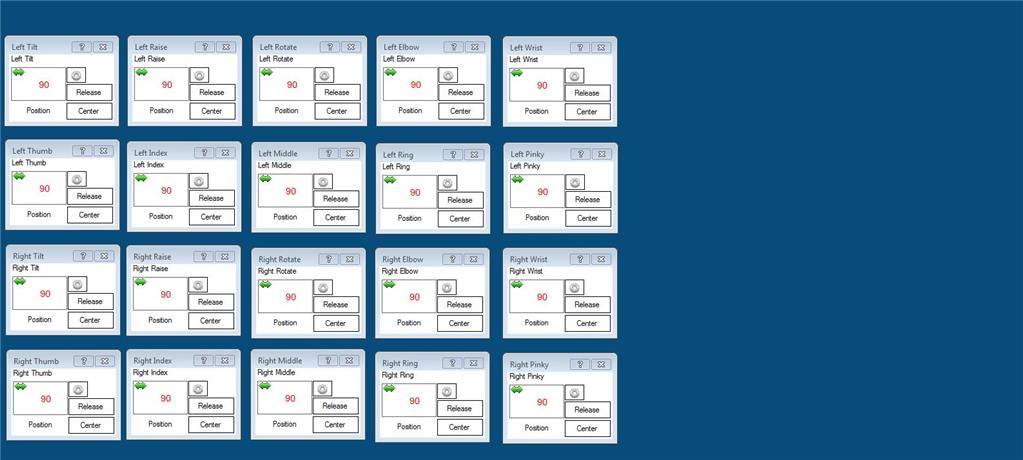
Third screen is for the arms and hands
So now I pretty much have all the same functionality I had in MRL give or take. I am pretty sure I am not doing this entirely correctly but it will come with time. Need to get into the scripting. I guess there are some tutorials to watch. So far my experience has been pretty good and in a day eclipsed my MRL progress of the last 6 months.
I'll update this thread with my progress and appreciate any feedback.
Discover more robots

Robotdude's Lieutenant Commander Data

Fxrtst's Will Huff's Lost In Space B9 Robot Build


Have you tried the synbot plugin https://synthiam.com/redirect/legacy?table=plugin&id=167
or aimlbot: https://synthiam.com/redirect/legacy?table=plugin&id=242
?
@Perry- Thanks, I had hoped someone had figured out a way. That's beyond my skills.
@DJ- I have the aimlbot working. It works well, it just doesn't have as many features as Program A B (amil2). I am slowly trying to figure out synbot.
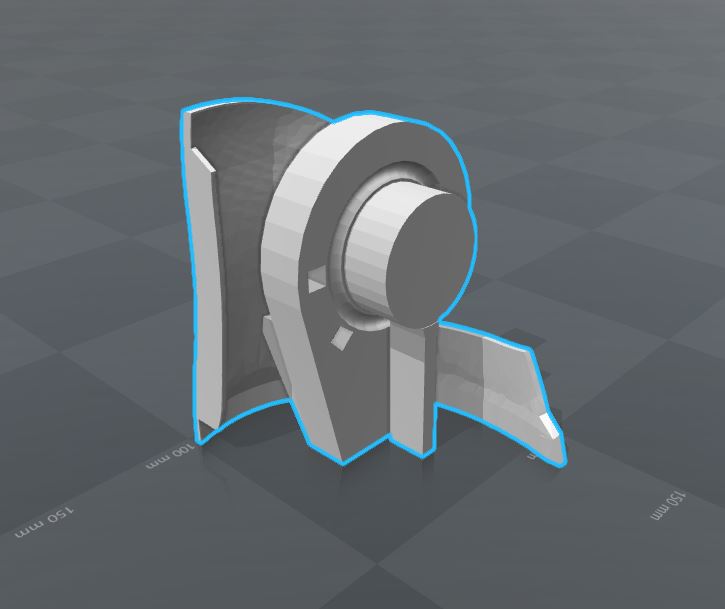
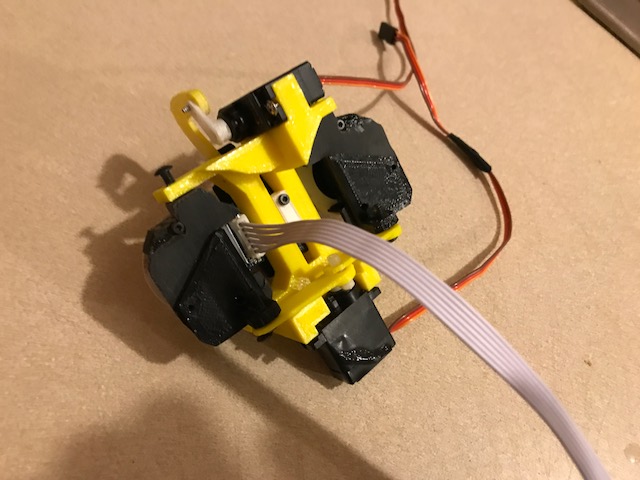
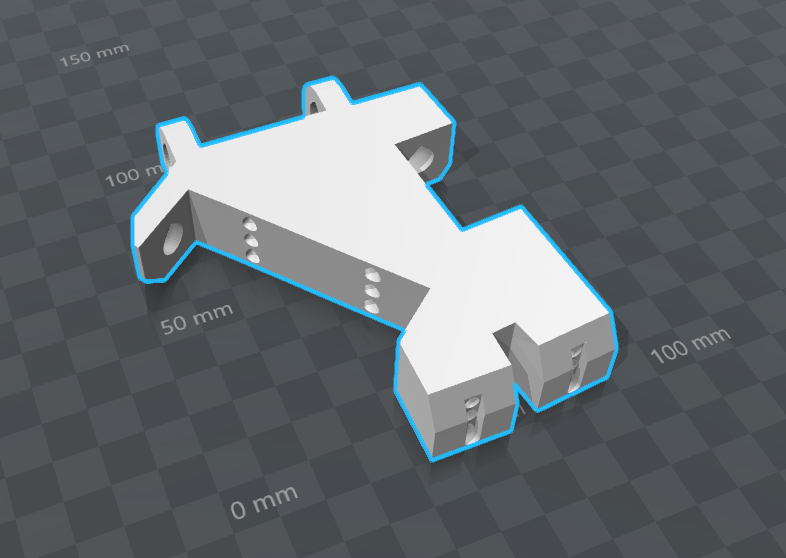
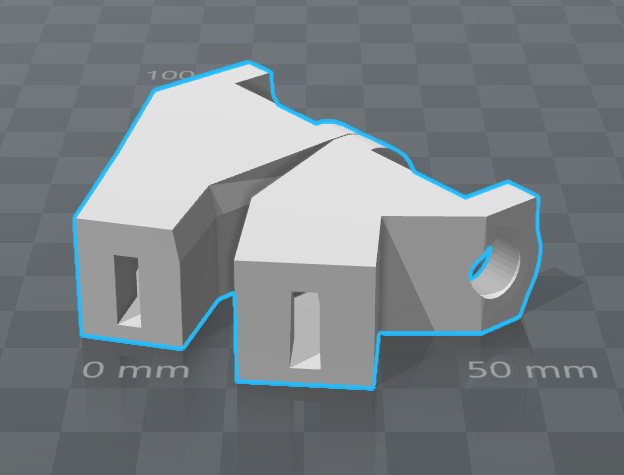
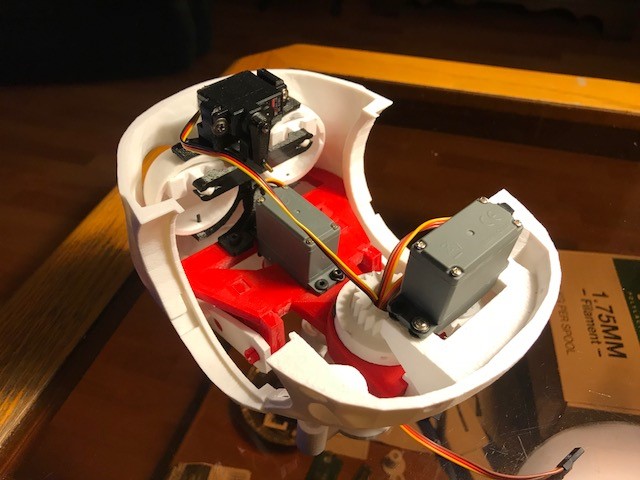
Just finished up printing Gael's new neck design. It is a really great evolution of what Bob H has contributed. It seems much more solid. I had to make an adapter because my head design s so different now. Sill keeping the EZR controller in the head. Previously I was using only one servo to drive the tilt but I bit the bullet and stripped the electronics out of the second servo and made it into a drone servo to the driving one. Now with one piston pulling and one pushing it helps a ton.
Cool, I haven't seen the new neck yet. Going to check it out.
Very nice Perry
Today is a happy and a sad day. Robot Man (That is the best name I ever gave him) is retiring tomorrow. He has worked diligently his whole existence, helping to promote human-robot relations. It is time to let him get on with his life. He wishes to travel the world, maybe meet someone from the RealDoll factory.
This means I will be starting a new project. I have Some ideas that I am working on. I want something different. Something like a scratch built inmoov my way. But not an iinmoov clone but a tangential concept. I want it to look like a robot. Mechanical in most of its design features but organic in different ways. Hopefully I will post up something soon. Suggestions always welcome
So end of an era here. I hope my work has helped some in one way or another. For now, I am drinking the beers and I set his power supply on 50 Hz which gives him quite the buzz. Off to the clubs after that. Hope he makes his flight in the AM.
Perry and Robot Man Over and Out
Hey Perry, A fair good-bye. Hope his travels are good.
I have begun (last month) to scratch build a new robot too. Good luck! It's a great hobby. Hope the updates from EZ-Robot will make our builds more exciting.
Thanks a lot. It is funny because without the first concept I have already named my new bot Scratch. I wanted him to be weathered. It took me a few minutes to realize the scratch build aspect so I decided it would be a great name.