
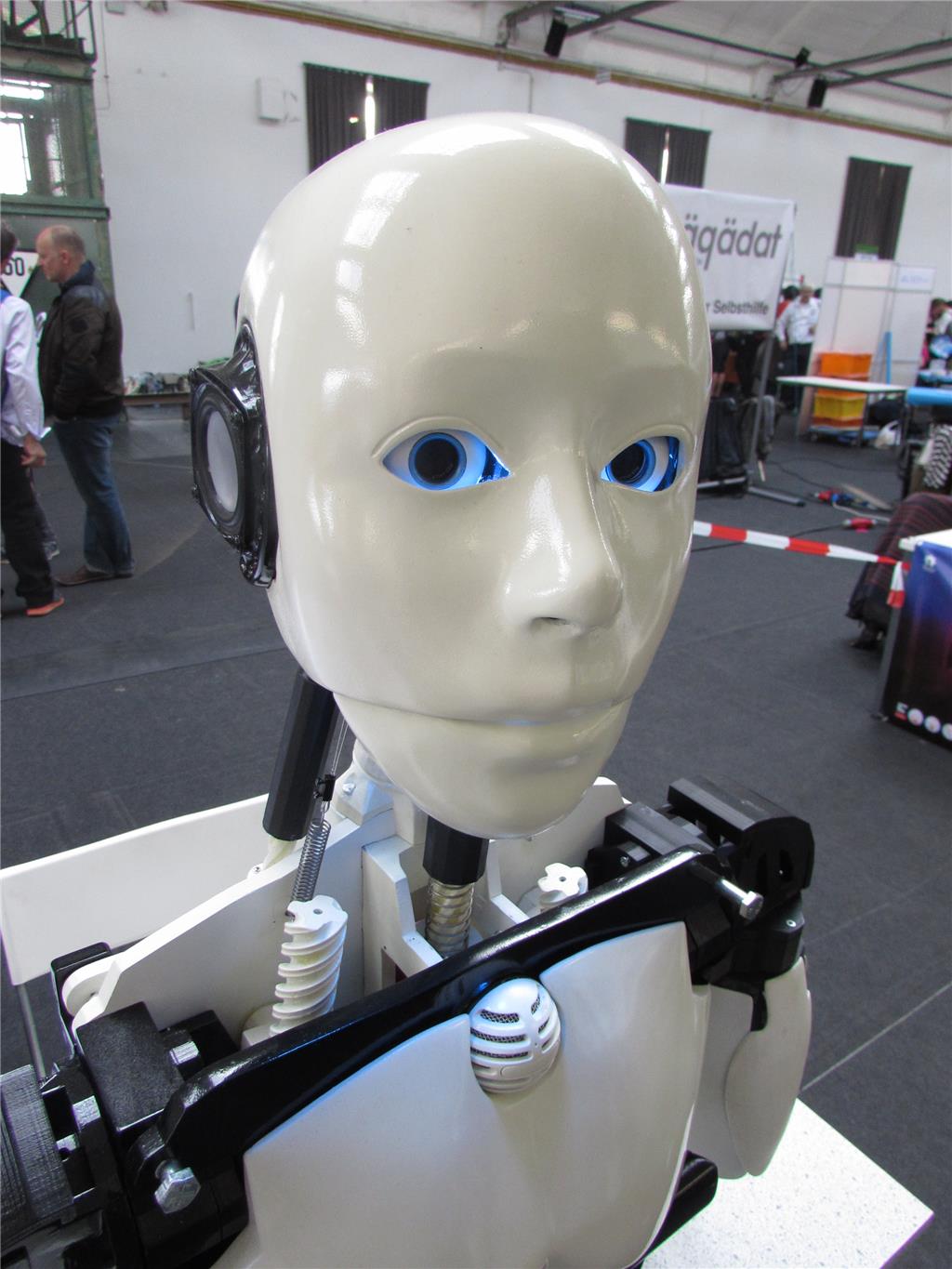

Here is the first interesting video of my Hansi.
With working Head and Torso ( and of course with Neo Pixel Rings)
By rentaprinta
— Last update
Discover more robots

Canadian's Giant Robot Project With Ez-Robot Board
Giant outdoor robot on Wall-E base using EZ-Robot board and Sabertooth 2X25 RC control; wheelchair drivetrain, planned...

Bhouston's Inmoov's Sensors
Sensor scripting assistance to integrate sensors and enable proper operation, with collaborative support from Rich,...
Nomad's Remix Inmoove Head
Modified EZ-Robot head with pan/tilt, three extra HDD servos, dual-camera cable pass-through, IoT/EZ-B v4 ready, InMoov...

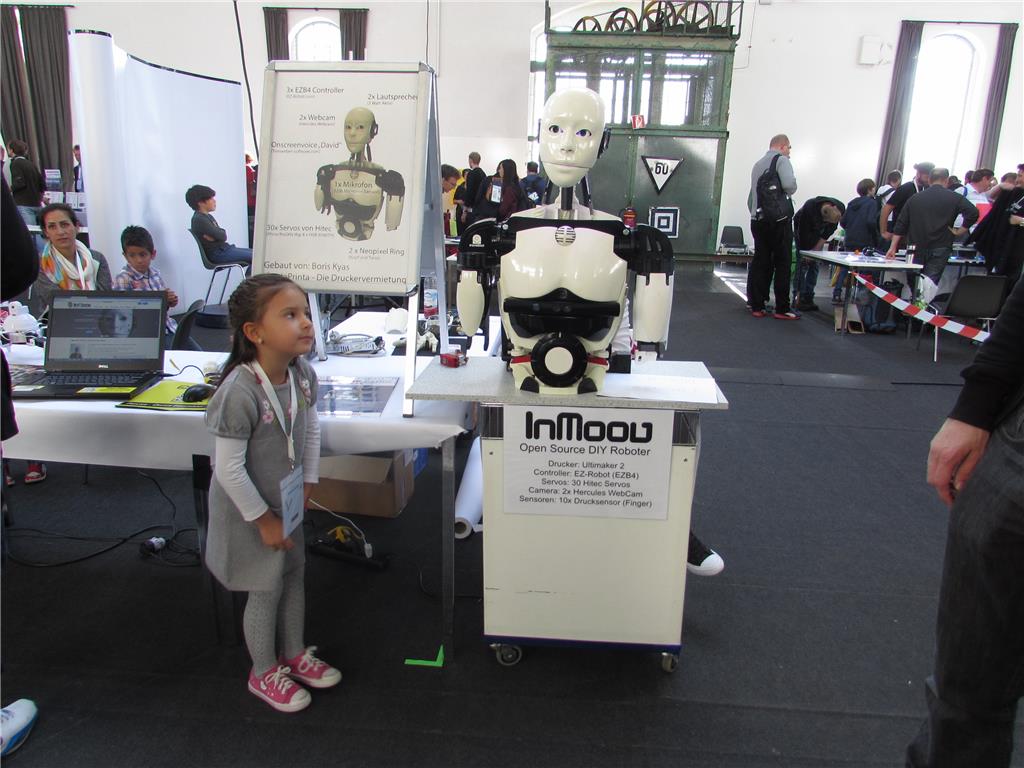
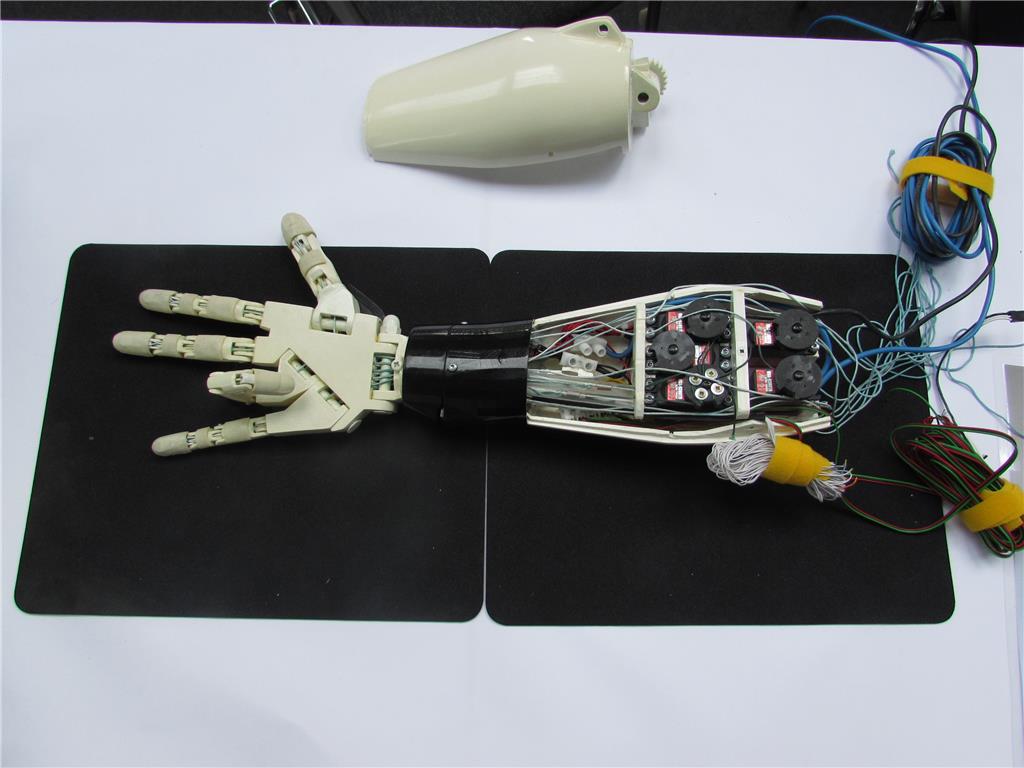
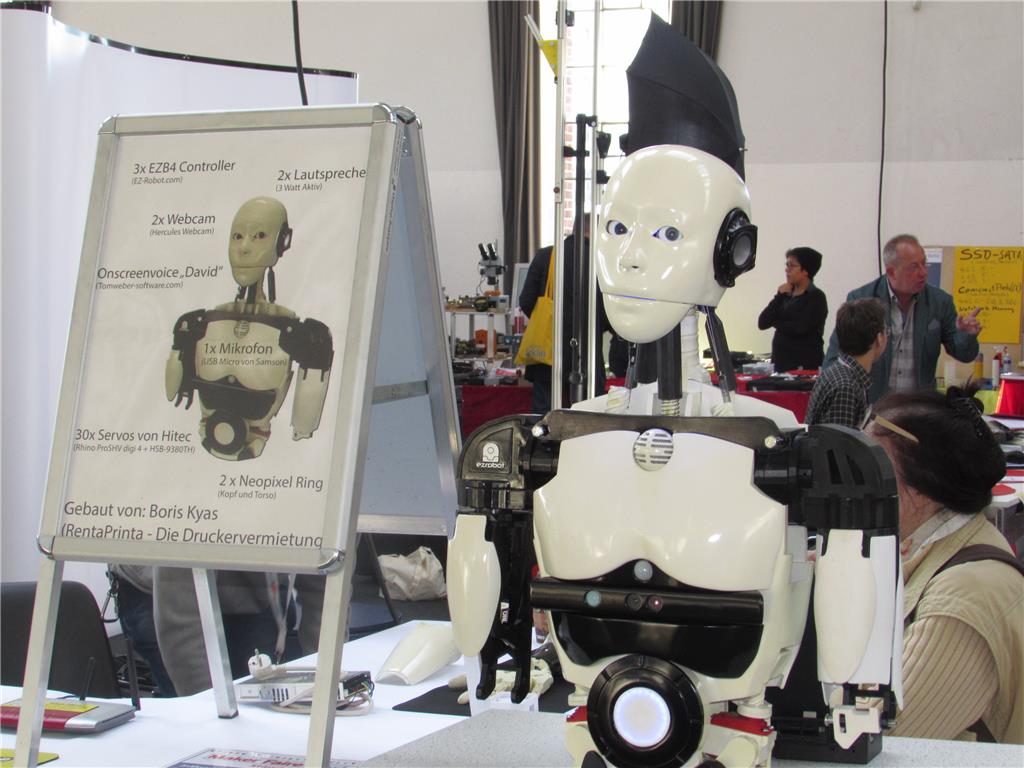
Here are some Pics from the last Maker-Faire in Berlin:
@Robot Doc
here is the video, where i explain the Neck Spring Secrect.
https://youtu.be/xa6oeJhvwcA
Boris
Nice engineering Boris. Your German ingenuity makes me proud of my heritage!
I see you are going to have three EZB's sitting right next to each other. Have you had any problems with radio interference with each other? Others have complained about this issue. I've got two EZB's within 4 inches of each other and I haven't had any problems at all. I wonder if it's a real issue with EZB or something else. The only time I've had problems is when I sent a command ment for one EZB but had it coded to send to the other by mistake. Usually a Sendserial command. Then one will disconnect.
Boris
This Inmoov is very good, and the mouth is in perfect sync with speech, I know you had a lot of trouble in the beginning with the talk servo control. I'm struggling with mine, sometimes it works OK, but I can run the same script again and it gets out of Sync on some words?
Also I have problem with servo buzzing, which looks like you have mastered.
The spring on the neck piston is a GREAT idea, and I will definitely look at doing this on mine.
The photo's at the Maker-Faire in Berlin of your Inmoov look fantastic.
Cheers, Chris.
@Boris You're making me jealous! Your Inmoov finish quality is just great. I wonder if someone will in the future teach or share info how to achieve such a good result.
Thanks for sharing the neck design, I had to abandon the 3 neck pistons because of the head weight containing the EZB in it. The spring Idea will certainly solution both the movement and the buzz noise coming from the neck servo.
@Cem Talking about the buzz noise coming from servo trying to hold position. The Inmoov shoulder having 3 servos to control the arm movement is quite a challenge to. The arm twist and arm lift mechanism are capable to hold the position even when the servo is release. (also shoulder lift in most of the case).
NOTE: after a servo release command, the only way to restart it, is to set the speed to 0 or 1.
Here's my solution: 1- At the beginning of an action, do what I call a RESTART.
2- Do the action (adjust the speed you want)
3- At the end of the action then do a Servo Release
(first line is a sleep timer to let the action finish his movement before applying the release command)
Start and Release could be 2 separate script that you call from each frame within an action. Call Restart Script within a pause frame, Call Release Script within the movement frame.
It's working
@Dave
until now i had no problems with radio interference. But i must say until now the EZB No.1 and No.3 only send serial signals to 2 Ardunio Uno for the NeoPixel Rings.
In the Future the No.1 will drive the left arm and the No.3 the right arm. I will see what happens.
Connection is always stable!
PS: You come (or your familiy) from where in Germany? I am born (West) - "Berliner" long long ago ;-)
@cem thanx that you like the speech control. But i must say there are also some problems. If he will read a "rss"-feed he stops before the hole feed is finish. If he tells the time also the mouth close before finish. The same with date!
I use the "Say" command there it works ok. If i use the "SayWait" Command sometimes also the mouth stops before the telling is finish.
Still there is missing some tuning for the talking servo.
@Aerius i made a turorial for the work to get so smooth 3d Printouts.
If you are interested: here is a link:
https://groups.google.com/forum/#!searchin/inmoov/pla/inmoov/a6z8a43DRmA/09L5B8eDtvoJ
and thanks for your "Anti-Buzzing-Script" i will check out!
Another idea for the springs:
I will try to use some springs also for the "Forarm" to get up a little bit and in the Shoulder, when the arm is moving up and down (the same like in the Front Neck Piston)
When i finish this, i will make photos.
Boris
endlich mal ein deutscher Bastler hier :-) Das freut mich sehr!
Super Arbeit!
GruB Marty Robo Toys
Hallo Smarty
Hab dir gerade bei Youtube gepostet.
Jau danke fur das Kompliment.
Hab auch schon dein Shop gefunden ;-)
LG
Boris