
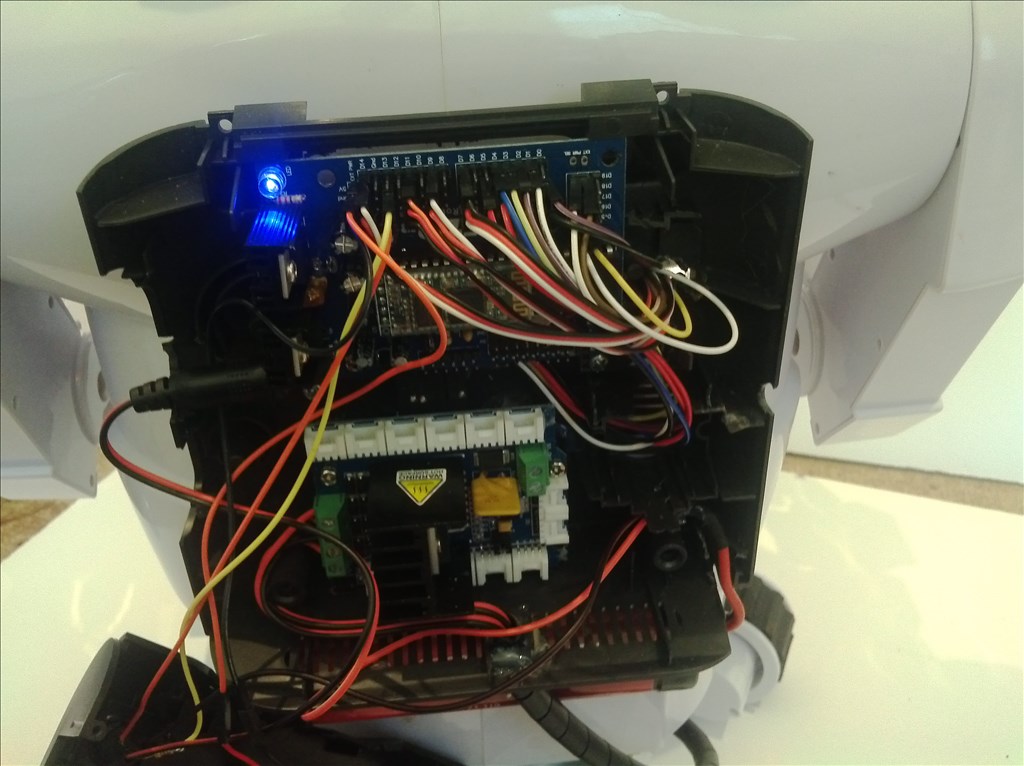
Here is another of my projects.Will more info.







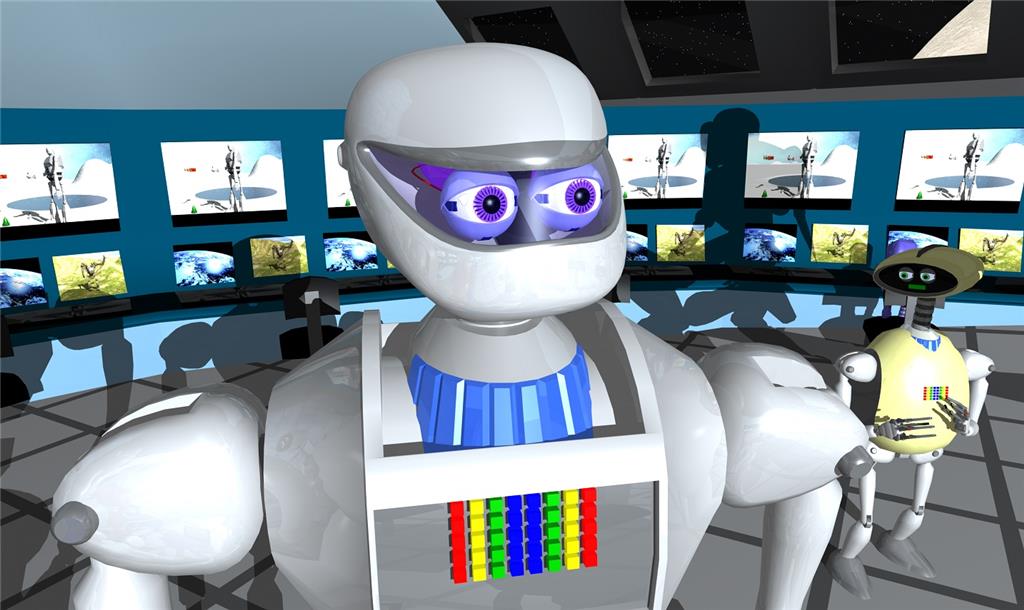
And here some of my extended robot family.

By rb550f
— Last update
Discover more robots

Ezang's Let's Have Some JD Robot With Voice Commands
JD robot voice control with left-right head movement for natural, responsive interactions

Justinratliff's Data Or Termidata
Centurion security robot inspired by Cylons, Terminator and Person of Interest, built with Synthiam ARC for...
David's 3D Printed Ez Robot Bob
Bob, a 3D-printed EZ robot built with EZ-Bits, 3D-printed parts and hot melt glue for DIY robotics and easy...

I found a brain for him! (of course, JK)
oooh Cool emiglio, I wanted to try and use emiglio as a torso ontop of a omnibot 2000 at one time but i could never find one for a descent price. I ended up just extending the omni body. Do the emiglio arms already move?
I added servos to arm and wrist.Also torso rotates with heavy duty servo..2 micro servos for pan tilt.
wow that's real neat! Good mixture of using the rover with that shell! Also great work on his head with the visor. Overall that's a super neat ez-robot!
Looking forward to a video!
That's a nice looking robot ! Congratz ! I'd love to see some videos of it.
Yea definitely , a video would be awesome , I'm interested to see those arms move, they look great!
That head is going to be sweet! Awesome color for the eyes
Where did you get the dome from !? Excellent JOB !