



I finally purchased an EZ-B, I didn't go with the kit (on a budget) just the board. My Idea is to make an autonomous vacuum, built out of junk I have laying around.
parts list:
#1) EZ-B #2) 4 dc motors (probably only 2 needed) #3) 2 h bridges ( probably only 1 needed) #4) distance sensors #5) 4 servos #6) small camera I had lying around #7) Old Handheld Vacuum
Needed Parts: #1) Battery pack (specs unknown at this point) #2) some sort of homemade seal for the vacuum nozzle ? #3) some sort of wheels #4) a platform or container or some sort

two choices of vacuums this one has its own battery and charger. though its a pretty weak vacuum.


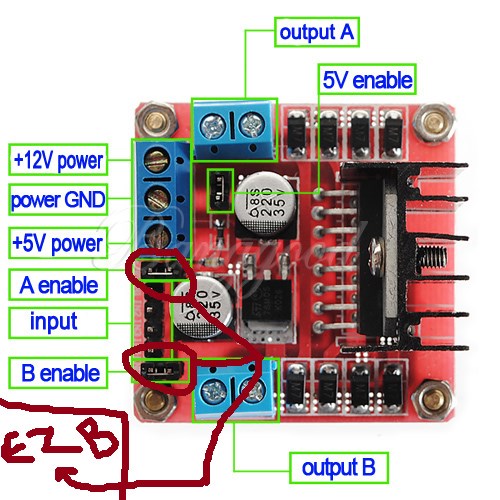
here is the h bridge, I believe it will work with the EZ-B, it's kind of an overkill
here are the servos ( for camera and distance sensor movement)
here are the motors.... I made a mistake and purchased the h bridge from china....now I have to wait forever lol.
and that's all I have at the moment... any and all feedback or constructive criticism is welcome. I don't offend easily so don't be shy....lol
Discover more robots

Jstarne1's Meet Dusty , Modded Omnibot 4 Home Security Cam,...

Nomad's Using Robosapien V2

Your robot is an interesting project. I checked the link and see the engines with no gearbox, engine and gearbox need to walk slowly and have the force to move the weight, two would be enough something like this: Motor
well I guess that's the first of many mistakes...lol. I didn't even think about that. so the motors I purchased have no gears just magnets, and if the robots too heavy they wont spin? not enough Torque.. I see. well I am new to building robots. I am more of a software and computer guy... thanks for the input i'll buy the motors you suggested... thank you R2D2
thanks for the input i'll buy the motors you suggested... thank you R2D2
I guess I can use the wrong motors for small brushes to kick the dirt in front of the nozzle, just like the Roomba...lol
Do not worry, I burned my first sensor connecting it wrong, the question is to learn. Anyway engines must have a lower consumption in amps amps h bridge, consumption can be measured with a multimeter engine while the engine is running with the wheels and final weight of the robot, to know the final weight shopkeepers first know that you vacuum and battery use (because consumption depends on the weight of the robot) In short, do not rush to buy, these engines are good, but consumption endure h bridges? How many bridges aguentan h amp you bought?
I purchased 2 h bridges. Just in case i don't remember the amperage off hand.
Specification:
Double H bridge drive Chip L298N (ST NEW) Logical voltage 5V Drive voltage 5V-35V Logical current 0mA-36mA Drive current 2A(MAX single bridge) Storage temperature -20 to +135 Max power 25W Weight 30g Size:434327mm
Ok, with 2 amps will not have problems with these motors, and 12v is 60 revolutions per minute (one wheel revolution per second) I think it's a good speed for the task of cleaning, more speed would be too fast.
Great, just what i wanted to hear.