






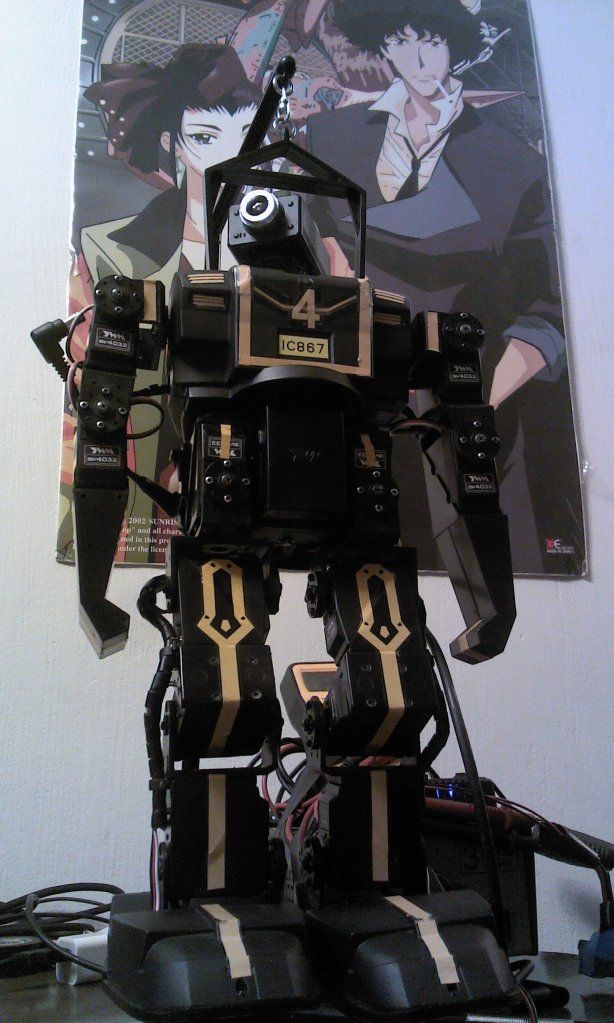
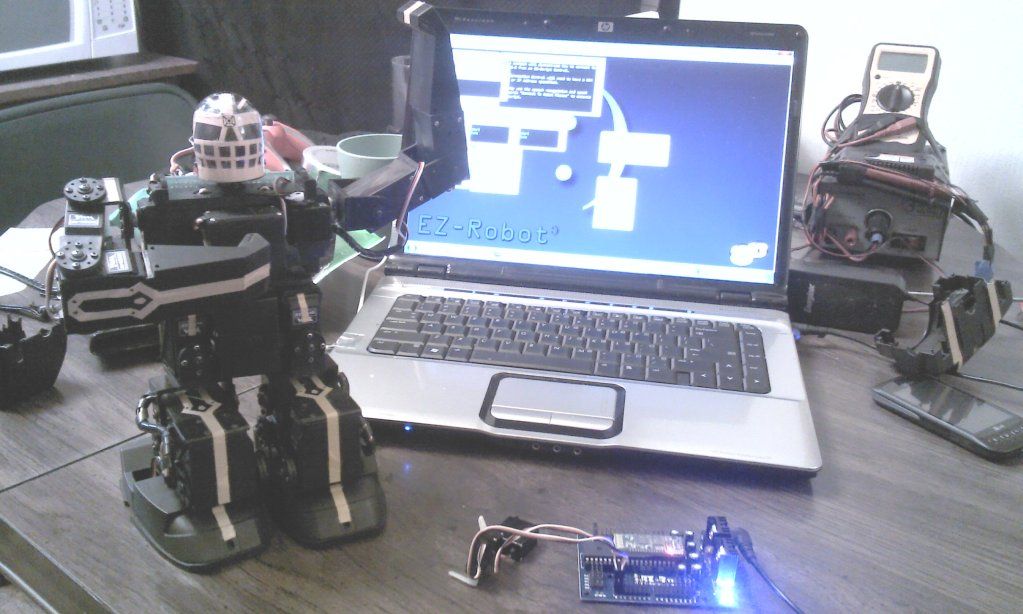
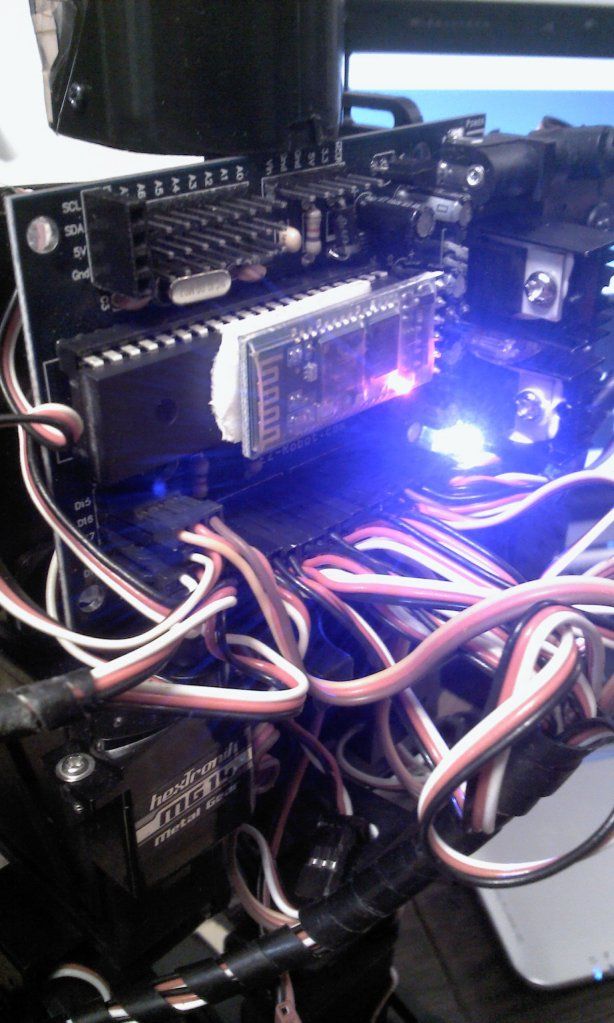
Just got my EZ-B today, and I hit the ground running:) This is my robophilo robot. He's the cheapest 20 DOF robot on the market. PHILO stands for "Programmable Humanoid In Lifelike Operation". I Think the creators may have overlooked the cryptic acronym lol. I just set up the AutoPosition with his first movement. I cant believe how easy this is, I got him to this point in just a couple hours:) These are all standard servos, but with all of them running off the EZ-B, the regulators make some serious heat. Even had a couple brownouts. For now I'm using a 12v 3A power supply. The onboard battery is a 2 cell 750mah Li-po (8A continuous 15A max heli batteries lol) that I haven't tried yet.The next step is to give the servos external power, I don't want the EZ-B carrying all that juice:) Here's a short video and some pictures:)


Discover more robots

Jstarne1's Diy Ezb Powered Sla And Lipo Battery Safe Charger...

Bumsteadsean's Sentrybot


Thanks mcsdaver:D Very small update: if anyone is interested, I posted my current project file on the cloud under Examples.
I love your robot man. Your making great progress. I will watch closely as you work with phil. Maybe ill do a bipedal robot in 2013 but right now im enjoying yours. Keep those posts and videos coming kenny. Its gonna be a long winter.
Hi, let me just say your work is awesome! Now, when operating your Philo on the EZB, does it require a gyro sensor to maintain its stability while standing? I'm creating a humanoid of custom creation, and i just wanted to know.
@RoboticsMaster I am building a humanoid also. I hope to see your build as soon as you start posting pics and videos.
Nope, no gyros, just big feet and lots of fine tuning:) That works ok on my bot because its not very big. It would be awesome to add a 3axis accelerometer, just need to make sure its analog for fast reaction times. Well, that and I'm out of digital ports lol
Wow, that's awesome! Well, I need to start building soon, project SIHRO won't start constructing itself; yet, lol. Thanks, for the info, Kenny! Also, nice work on your humanoid mcsdaver! Would you have happened to vacuum form the face? Also, if you two want to check out the beginning of my little robot companion, you can view it here: https://letsmakerobots.com/node/33846
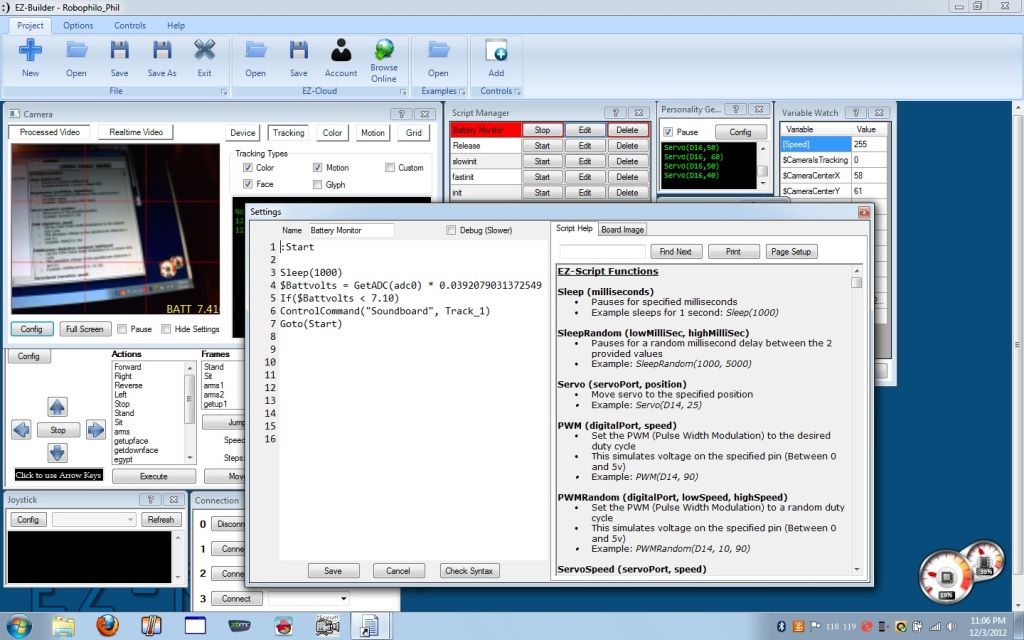
Today I added a battery monitor. Li-pos are easily damaged if the battery is run too low, and I wanted to be able to watch voltage spikes. My battery is 8.35 volts hot off the charger and 7.1 volts at 80% discharged. (20% remaining) I've been told the service life is longer if they're cycled this way. So, I studied the forum and did the 'ol twin 10kohm resistor trick to pull the battery voltage down to half of what it was, so as not to blow the ADC port. Here's my monitor program example.
The program creates the variable $Battvolts then updates the variable once per 1000ms. I messed with the multiplier till it matched my voltmeter. If the voltage is less than 7.1v (3.55 per cell) it plays my disable speech sound to alert me, once per second It's kinda funny, if I lose the bluetooth connection, ARC reads 0 volts and sounds the alert. I guess its kinda dual purpose lol After I was done, I added $Battvolts to my camera overlay
It's kinda funny, if I lose the bluetooth connection, ARC reads 0 volts and sounds the alert. I guess its kinda dual purpose lol After I was done, I added $Battvolts to my camera overlay
Nice mod. I made up a similar voltage divider but my script is an auto connect... if I loose connection (determined by no voltage) it automatically tries to reconnect, also with voice prompts . I am running a AGM battery, a lot more forgiving, so I just manually watch my voltage with the ADC display, but I like your idea of automatic audio cues for low voltage... have to steal that one
. I am running a AGM battery, a lot more forgiving, so I just manually watch my voltage with the ADC display, but I like your idea of automatic audio cues for low voltage... have to steal that one