




Have only been here as a member for a day now and quickly received great info from another member building an r2 from a Walmart r2 he purchased. A bit of background to my project... Always wanted an R2 since seeing the first Star Wars in 1977. Shows my age..lol Nevertheless, hasbro came out with the interactive R2 quite some time ago and I immediately scooped one up. While he could do just about everything I wanted in a robot, he isn't quite the size that I wanted and a few more bells and whistles would be nice but not completely necessary. That said I began this past summer building my own R2 from mixture of files I put together provided by the astromach building group and a pepakura group I belong to. I decided to build a 2:3 scale version because in all honesty I don't believe Lucas would've had r2 be 40+ inches had he not needed a person to be inside to control him back in the day. Plus, I just don't want one that big. So mine will be about 36" when its all done. Initial plan was to build him light weight using styrene, hdu signfoam, card stock paper for the details using pepakura,and fiberglass. Thought behind this was to do as light as possible so that I could use the insides of an interactive r2 to bring him to life and secondly... His weight would not be a safety issue should he run into something or someone. That said... The newer interactive r2 comes with a controller, many functions and has voice commands like my version all for $140.00. To build using the ezrobot that already places me well above the cost of the toys r us one. So what benefits would come from ezrobot over using the insides of an already fabricated r2?
Discover more robots

DJ's How Do I Shovel My Snow?

Ericez's I Create Baymax Doll Robot For Robot Theater Using...


So I finally got my ez robot.... Was waiting til I was further along with my build to start diving into learning this stuff. Nevertheless I'm the proud own of a JD humanoid. Got him all together and was playing around with the app... Needs some tuning which was expected and I figured I'd go with this vs the developer kit just for that reason... Having nothing to base what does what, etc I thought this would give me an easier way to learn just that and some other things prior to putting the components into my r2. Which it definitely is. One thing I'm a bit disappointed with is the ezb itself keeps detaching from the body thus disconnecting from the battery causing him to shut down. I'm not quite sure what the ezb unit itself is supposed to look like since this is my first but is it supposed to have just one prong sticking out the back of it to connect to jds body along with the two plastic tabs? It doesn't seem to really lock in place. The other question I had is it supposed to be so loud when standing still? The servos sound like they're working overtime in doing so. Just making sure I didn't accidentally get a lemon I guess....
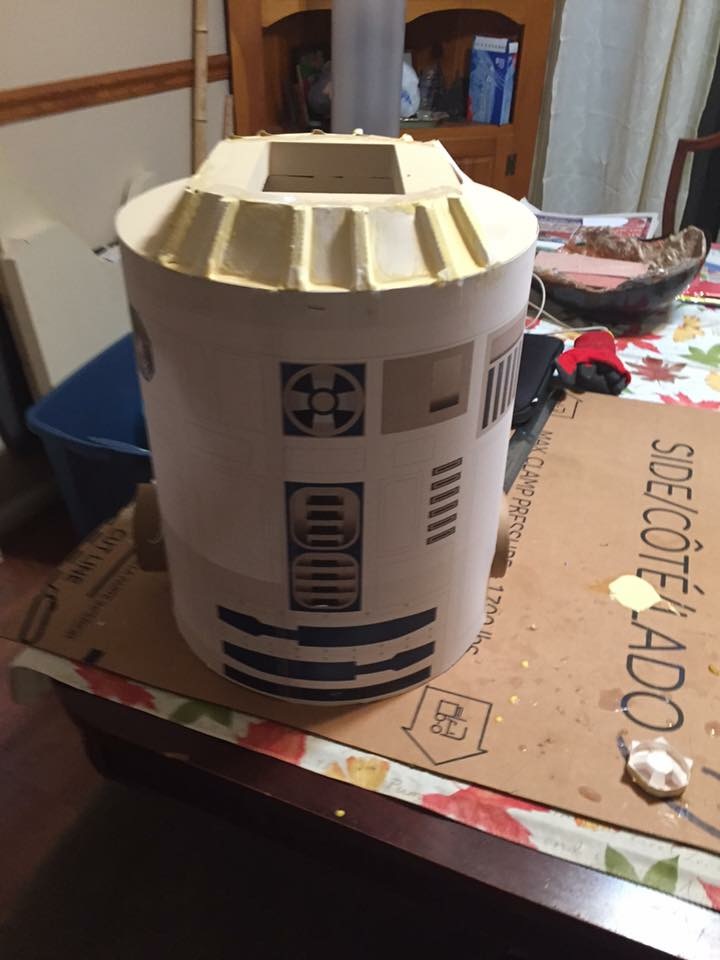
Will post updated pics of my r2 later this weekend. He's coming along pretty slick. Have to remold the feet this weekend and will hopefully have him standing on his legs and feet by the end of the weekend.
@Jkcweber Is this your first experience with hobby servos? They all buzz when holding position. It's not exclusive to ez robot servos That's just the way they all are...
The mini deans connector is whet you are referring to may need some adjustment in order for the ezb to sit tighter in the base.... EZB4 Power Pin adjustment
If all else fails I use a little bit of tape to hold the ezb4 in place in it's base...
Hi @jkcweber, Enjoy JD he is a lot of fun. Be sure none of the wires are causing the servos to jam. They shouldn't be tight. A jammed servo can cause it to burn out. Looking forward to your pictures of your R2.
A teaser .... Still a lot to put together this weekend.
Thanks for the suggestions. I did the pin adjustment and think that worked. Going to try it out after he charges. My son was home "sick" all week (probably could've gone today back to school but didn't want to take a chance) so he played with JD all day.
So I've got most of my r2 parts and putting him slowly together but since the rain here I've been put back on how much stuff I can do on him sanding and painting wise. Nevertheless it's coming along. I spent this weekend uploading sounds to ez-B software and messing around a bit.
Am curious if there's a way to make the ezb recognize when you say something as in can I have r2 turn and look at me if I say "hey r2" or just "r2"? Is this partially voice recognition and partially camera working together?
When the you say Hey R2 you can have it run a script to turn on facial recognition, and turn the head toward the direction the sound came from. You would need mics sensors plugged into analog points and use the script to turn the bot/head toward the direction of the mic that picked up the loudest sound (highest value). The mic you use to pickup the speech would be a different sensor, perhaps a usb mic plugged into an on board pc. There would have to be a script running that would be constantly monitoring the analog ports that are have the a mic sensors attached to them so you would know which mic sensor had the loudest sound at the point that the speech happened.
For mic sensors and proximity / motion/distance sensors, can I use adrunio sensors and plug them into the ez-b? Or is there a better way?