


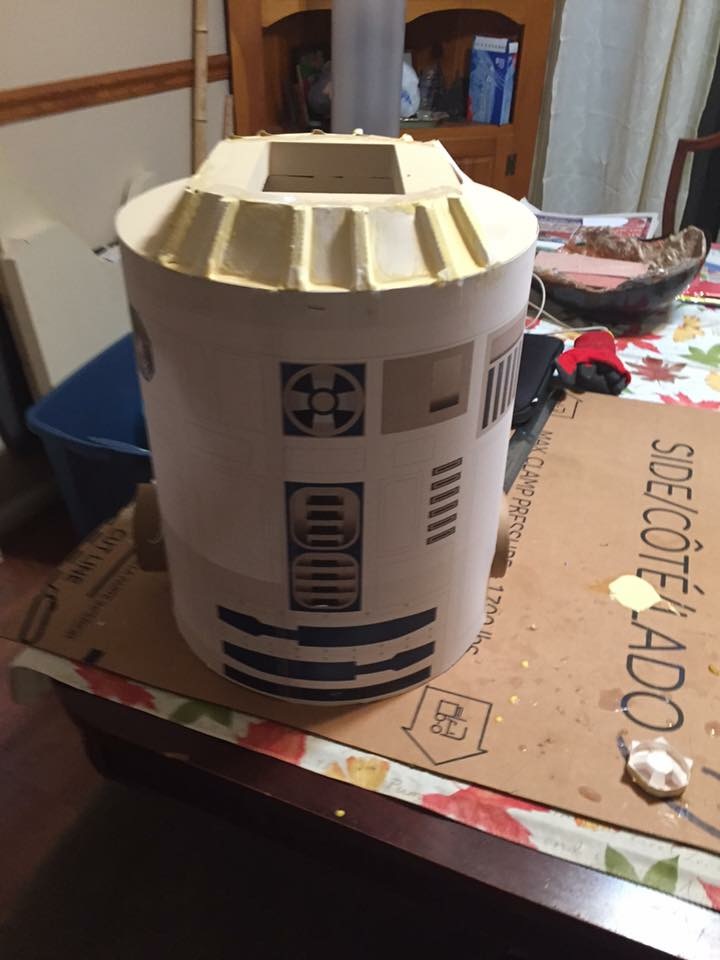

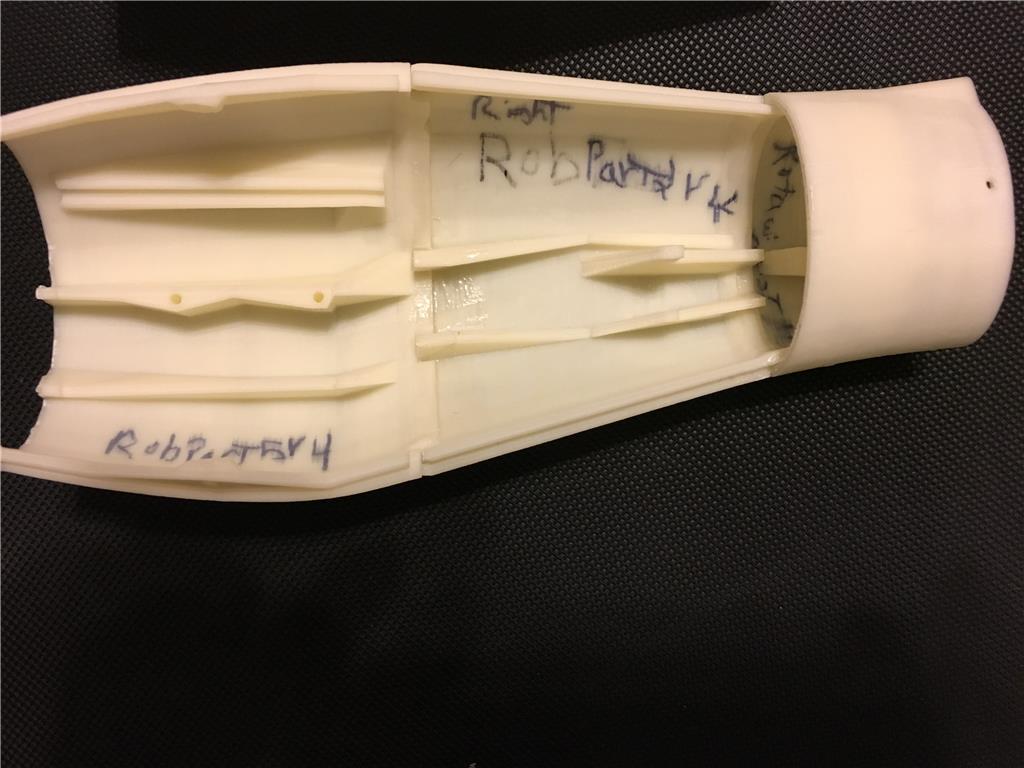
Have only been here as a member for a day now and quickly received great info from another member building an r2 from a Walmart r2 he purchased. A bit of background to my project... Always wanted an R2 since seeing the first Star Wars in 1977. Shows my age..lol Nevertheless, hasbro came out with the interactive R2 quite some time ago and I immediately scooped one up. While he could do just about everything I wanted in a robot, he isn't quite the size that I wanted and a few more bells and whistles would be nice but not completely necessary. That said I began this past summer building my own R2 from mixture of files I put together provided by the astromach building group and a pepakura group I belong to. I decided to build a 2:3 scale version because in all honesty I don't believe Lucas would've had r2 be 40+ inches had he not needed a person to be inside to control him back in the day. Plus, I just don't want one that big. So mine will be about 36" when its all done. Initial plan was to build him light weight using styrene, hdu signfoam, card stock paper for the details using pepakura,and fiberglass. Thought behind this was to do as light as possible so that I could use the insides of an interactive r2 to bring him to life and secondly... His weight would not be a safety issue should he run into something or someone. That said... The newer interactive r2 comes with a controller, many functions and has voice commands like my version all for $140.00. To build using the ezrobot that already places me well above the cost of the toys r us one. So what benefits would come from ezrobot over using the insides of an already fabricated r2?
Discover more robots
Redzone's 2Nd Inmoov Build

Recon's Development Of Autonomous Navigation Robot


Welcome to the community first of all!
The EZ-Robot platform allows you to really do whatever you want. The real difference between using an EZ-Robot EZ-B and leaving it as is is that your robot becomes tethered to the outside world with the EZ-B, along with allowing you to make the robot do whatever you want it to in the inside world.
Lets say that you want your robot to be able to get you information that is not contained inside itself. A simple example of this is News, Weather and Sports information. This is easily possible through the EZ-Robot platform. If you want your robot to be do things on its own, this is possible through the EZ-Robot platform. It can do really whatever you can imagine.
If you are happy with what you have, leave it. I find that I always want to add features to things so happy really never comes. I like the thought of having control to do whatever I want to do with a project so for me, I would go with the EZ-B. If you don't want to mess with trying to improve what is there (like most of the population) we totally understand. This isn't for everyone, but is by far the simplest and most powerful platform available.
How much does it usually cost for the starter kit? I saw $179 but not what it is normally . Also as seen below... I not modifying my current r2, ... But building an all new one. So I was considering buying another like the one I currently have and using the insides on my larger one. Ez robot looked like a very cool alternative however.
Do they offer firmware upgrades and do software updates often? Just curious as to how the software, etc has come along to include previous parts or if when I buy the v4 they will come out with a v5 shortly after with more bells and whistles.
The V3 is still supported by the software. There are multiple updates weekly normally, but I have very rarely seen something break because of the updates. The board can be updated via firmware, but the V4 hasn't had a firmware update pushed to the community yet. If the software updates cause an issue, normally there is another update released within days to fix the issue.
As far as cost goes, the developer edition is normally just under $200. Some opt for this route as you get multiple servos and other things that you know will work with your build. Its also possible to buy just the V4 or buy the V4 and the camera. This is the route that I normally go so that I can put servos or motors/sensors that are specific to my builds.
If you are building a robot from scratch, the best option is to start with a V4 and add to it as you build. There are a lot of people here who are more than willing to help you out with advice and programming knowledge to make your robot pretty much whatever you want it to be. The strength of EZ-Robot is in its Community and having a company that is dedicated to helping you succeed.
Programming for the V4 is as easy as anything I have ever seen. They have done a great job of taking the things that are difficult, and making them into very usable controls, but if you want to get into the programming side, its easy to do that also. Another thing that is cool is that EZ-Robot has invited the community to extend its offering by opening the ARC product to plugins. If you have a great idea, and you don't know how to go about programming a plugin, normally a post on the forums will interest someone. You will find that people are always posting new plugins that are very interesting.
Hello @jkcweber,
Looking good ! I know you are looking for the most cost effective way to control you new droid. If you get another control from another unit like you have, that will be it. You will be limited to what is there. You will also have to hope the smaller motors or drivers will move the larger unit.
If you get a programmable control, you can duplicate what you have, and go further. Additional hardware can be added such as a camera which can be used for tracking, face recognition, etc. You can build a library of voice commands, and have it speak back.
You do not have to be a computer programmer to make these things happen. Much of it is already built.
You will be able to take the program of an EZ Robot Adventure Bot or Roli and convert it to run continuous rotation servos to drive your robot using a movement panel. If you need to run larger drive motors you can get help here on hooking up an "H bridge" and still use programs available.
Do not be afraid of this controller. It is easy to use. Though it is very powerful if you want more complex things, it does simple things very well.
Enjoy,
Ron R
In re-reading your post, you seemed to be concerned that if you bought a EZB v4, a new one could come out and you would be stuck with what you had.
First, the "magic" is in the software. This software is reviewed and updated almost weekly. Features are improved, added, combined etc. Even people in the community have the ability to offer program improvements so all can use them.
The software is where the "operation system" for your robot is built. The robot connects to your computer over Wifi and runs this program to operate. This way the computer does the work. The ezb is the connection between the servos, sensors etc. and your computer. Even if an improved EZB came out, I think it would be mainly hardware improvements.
Do what makes you most comfortable. The whole idea of this robot building is to enjoy.
Ron R
Thanks for all the info guys... Am actually getting way more answers here than I did over at the astromach forum. Very much appreciated!
Ron... You brought up one of my other concerns. If I choose to take my droid somewhere that I do not have wifi does that mean he's not going to work correctly or does that mean I just can't adjust, etc?
Or does the ezb create its own wifi hotspot?
I suppose another option would be to use a netbook or similar small laptop inside of the droid? Or get into the aurdrino stuff which quite honestly scars me.
I am thinking about using the mid range saber tooth motor controller and doing some slightly large motors for the head, and feet considering they'll be taking on the weight they will.
I have some background in the servo, motor controls, ebec, tx and rx l, etc due to building my own quadcopter 3yrs ago prior to these store bought things that come complete. The nice thing was I used a naza controller on that build and am at the assumption that the ezb is similar taking away the headaches that come with aurdrino or other controllers?
Christmas bonus just came today and I was pleasantly surprised. Ezb may be showing up for Xmas lol
This is different than an arduino. It's very simple to use. There doesn't have to be any programming.
You can use an android or apple phone to control your robot. The controller will run in ap or client mode allowing for either direct connection to a device, or connecting through a network.
It really is as easy as it sounds. Connecting to sabortooth motor controllers are not an issue.
@Jkcweber There are two modes in order to connect to the ezb... one is client which is through your network router... The second is WP mode or adhock... this means you connect directly to the ezb... useful when you are out and about... The latter obviously means you won't have internet at the same time....