



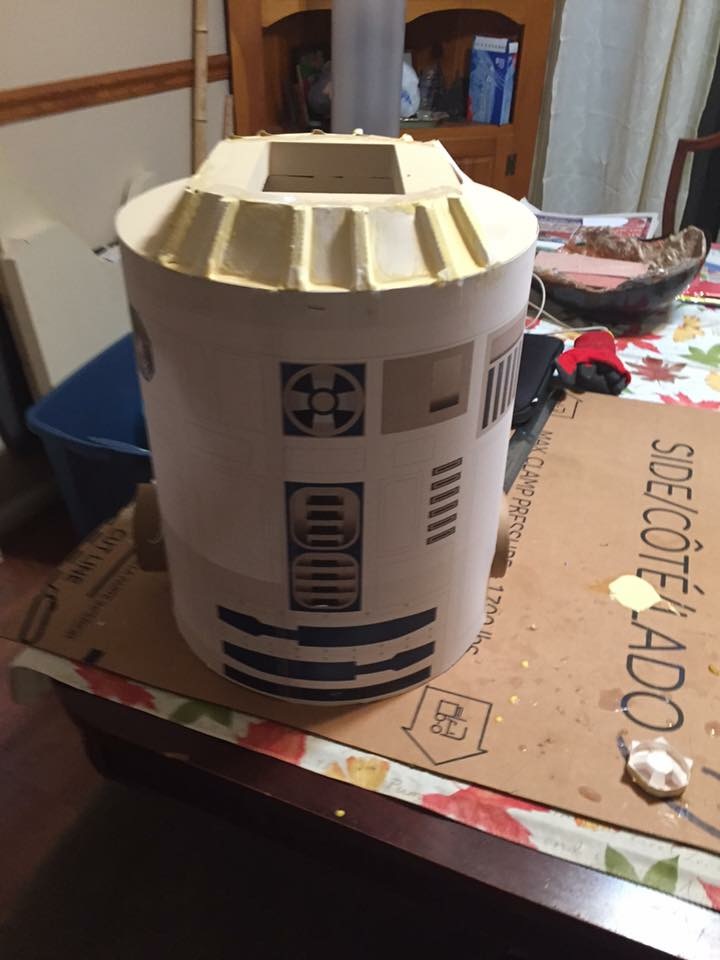

Have only been here as a member for a day now and quickly received great info from another member building an r2 from a Walmart r2 he purchased. A bit of background to my project... Always wanted an R2 since seeing the first Star Wars in 1977. Shows my age..lol Nevertheless, hasbro came out with the interactive R2 quite some time ago and I immediately scooped one up. While he could do just about everything I wanted in a robot, he isn't quite the size that I wanted and a few more bells and whistles would be nice but not completely necessary. That said I began this past summer building my own R2 from mixture of files I put together provided by the astromach building group and a pepakura group I belong to. I decided to build a 2:3 scale version because in all honesty I don't believe Lucas would've had r2 be 40+ inches had he not needed a person to be inside to control him back in the day. Plus, I just don't want one that big. So mine will be about 36" when its all done. Initial plan was to build him light weight using styrene, hdu signfoam, card stock paper for the details using pepakura,and fiberglass. Thought behind this was to do as light as possible so that I could use the insides of an interactive r2 to bring him to life and secondly... His weight would not be a safety issue should he run into something or someone. That said... The newer interactive r2 comes with a controller, many functions and has voice commands like my version all for $140.00. To build using the ezrobot that already places me well above the cost of the toys r us one. So what benefits would come from ezrobot over using the insides of an already fabricated r2?
Discover more robots

Ellis's Halloween Robot
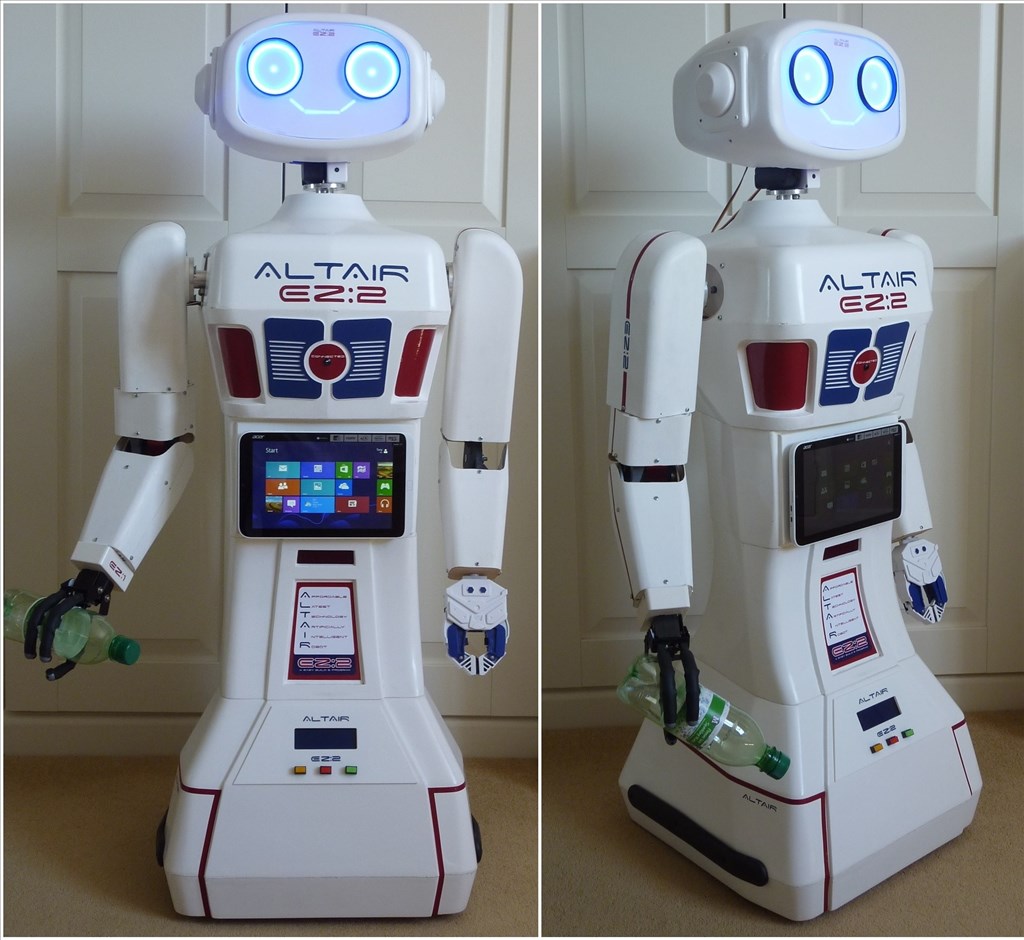
Toymaker's Introducing The Altair Ez:2 Robot


Here's my next quandary.. I have a 2.5"w x 3"h x 2.5" space to place the motor to drive this because I had already made R2's battery box and feet (which is where the motors typically go for this droid). So I'm limited on space. Which is going to rule out quite a few options....whomp whomp.
Pieces to drive a robot seems to be more difficult than programming to tell it what to do....and here I was semi-scared of programming..lol
Wiring for both motors would run up the individual legs and into the torso where the motor controller will be located with the kangaroo (if I go that route).
Power window motors, weren't too expensive from what I found and we have plenty of car junk yards that have plenty of cars with power windows that I could find one for significantly less. Electric scooter motors are pretty inexpensive too. But falling back to the space issue...neither seem to be great ideas anymore.
Battery/Power wise.. I thought a razor scooter battery would be a good solution. https://www.batterysharks.com/Razor-Pocket-Mod-p/PocketMod_UPS12-7_x2.htm?gclid=CMPfh6vd6skCFc2RHwodBloIYg My son has one of these scooters and I've ridden the thing and it last quite some time...so breaking that power into the dome motor, feet motors and a few little servos else where I wouldn't think would be a problem.?.
@jkcweber,
You will want to watch the center of gravity. Keep it low! And yes, robotics is very much like multi rotors. You will always find that there is a new gadget that will do a job better. But that is part of the fun of it all. You are in for a treat when you start using the EZ B4.
Thanks oldbot! Yeah... Am trying to keep Overall weight down but like you said, I certainly don't want him top heavy. A greater majority of controllers, etc will be located near his skirt area towards The front since he'll be tilted back. The battery will most likely fall over the center wheel (which I'm not making retractable) so that will defiantly help keeping him centered and with the weight should I go with the above battery.
So here's my list thus far.... Ezb v4 developer kit (reasoning behind this is the heavy duty servos will be nice and the six as a lot but I know I need the continuous servos too along with the sensor more so than the extra servos at the moment.) Sabertooth 2x 25 motor controller Kangaroo X2 Razor scooter 12v battery And some kind of motors for the feet lol Still stuck on this.
At some point I'll most like get the led display for the logic panel on his head too.
If using the Kangaroo you will also need wheel encoders or potentiometers to feed back the position data to the kangaroo. These can be part of your motors, part of the wheels, or added on.
You also only need thw kangaroo if knowing exactly how far the wheels have turned ia critical to your movement.
I would wait to choose the motor controller until after you choose your motor/wheelset. The Sabertooth 2x25 is a great controller, but is probably more tha you need given the weight of your robot and the space available fir the motors. Determine the amps your motors will pull and pick an H-Bridge to match (max amps at stall plus some overhead, say 20% so 2x25 would be used with 20 amp wheelchair motors.).
Alan
I could always use the saber tooth without something like a kangaroo temporarily too? The kangaroo would just make everything more precise... Correct?
Correct. The Sabertooth controls the motors, the Kangaroo knows the position of the wheels, so the EZ-B can give precise position instructions (how far to turn, how many times to turn). In an R2, a kangaroo can be very helpful in precisely turning the dome to a specific position. Not as needed on the drive wheels unless you are planning autonomous motion (ie, navigate to a specific place without someone watching to make corrections) which involves much more than just wheel position information.
I am certainly not trying to talk you out of getting one, just helping to make sure you are picking the right equipment for your needs.
Alan
Oh I didn't think you were talking me out of it. The sensors are impart of the reason why I wanted the package I'm getting. So that I can make him autonomous. So your input is greatly appreciated. I didn't even think of the dome but that too is a really good idea along with sensors there. The camera is going to go in the eye which will help as well.
So if I do the autonomous thing I will eventually need two motor controllers and two kangaroos? One setup for the feet and another for the head?
Definitely why I'm asking what I am so that o get what I need vs what I think "might" work. So I'm somewhat left to you All to guide me lol
Any suggestions on motors that will fit the space I have would be awesome too.
Well, there are a lot of ways to do autonomous navigation, but a kangaroo certainly won't hurt in giving precise position instructions.
Alan