



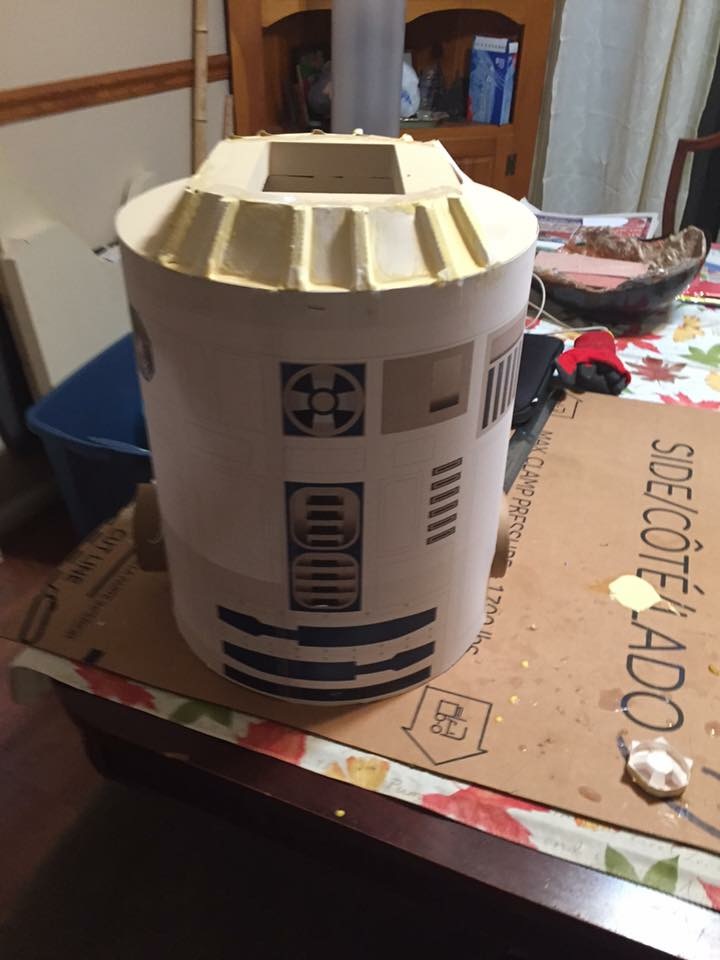

Have only been here as a member for a day now and quickly received great info from another member building an r2 from a Walmart r2 he purchased. A bit of background to my project... Always wanted an R2 since seeing the first Star Wars in 1977. Shows my age..lol Nevertheless, hasbro came out with the interactive R2 quite some time ago and I immediately scooped one up. While he could do just about everything I wanted in a robot, he isn't quite the size that I wanted and a few more bells and whistles would be nice but not completely necessary. That said I began this past summer building my own R2 from mixture of files I put together provided by the astromach building group and a pepakura group I belong to. I decided to build a 2:3 scale version because in all honesty I don't believe Lucas would've had r2 be 40+ inches had he not needed a person to be inside to control him back in the day. Plus, I just don't want one that big. So mine will be about 36" when its all done. Initial plan was to build him light weight using styrene, hdu signfoam, card stock paper for the details using pepakura,and fiberglass. Thought behind this was to do as light as possible so that I could use the insides of an interactive r2 to bring him to life and secondly... His weight would not be a safety issue should he run into something or someone. That said... The newer interactive r2 comes with a controller, many functions and has voice commands like my version all for $140.00. To build using the ezrobot that already places me well above the cost of the toys r us one. So what benefits would come from ezrobot over using the insides of an already fabricated r2?
Discover more robots

Steve's Elvia The Ez Robot Powered Android-Elvis Hack

Ezang's My First Video Of My Metal Arm Gripper Nov. 7, 2019

I always forget about Servocity. They have all kinds of cool stuff. Good luck on your search.
Ron R
Here's a good source for all types and sizes of motors. The Robot MarketPlace is a great place to buy from. They have all kinds of things other than motors for your robot projects. I get most of my motors and robot parts from these guys and also ServoCity. Check out ServoCity's Actobotics section when you're over there next time.
Motors at Robot Marketplace
As for choosing the right motor, it's kinda hard to advise someone on the right one to use. You need to look at the weight of the object it's lifting or moving, the power requirements it will need and draw and if it will fit into your build. Both places mentioned have great information listed for each motor they sell so you can make your decision. Sometimes you just need to make the best choice possible and then give it a try. If it doesn't work out at least you have a base line to make a different choice and buy the right one. That's called prototyping. LOL. Motors at The Robot Marketplace
Motors at The Robot Marketplace
So I found the motor I want to try, but I'm wondering if there is another version, same specs but less costly since this is a prototype ordeal ??
Here's the link to the motor I'm considering. https://www.servocity.com/html/313_rpm_hd_precision_planetary.html#.VntvLOw8KnM Also, if I get 2 of these... I will only need one saber tooth motor controller... Which I'm thinking this would work but correct me if I'm wrong...
https://www.dimensionengineering.com/products/sabertooth2x12rc
So this setup with the ezb ... A good starting point?
I would get the 2x12 instead of the 2x12 r/c. It gives more connectivity optioms including simple serial mode that we know works where we have seen problems in r/c mode (although someone this week got a roo/sabertooth combo to work in r/c mode so it may not be an issue afterall). Alan
Oh, wait, those motors have a max stall current of 20 amps, you meed a 2x25 not a 2x12. You need the max amps plus overhead.
Alan
I want to share some very basic calculations with you and explain them. This is not a complete calculation by any means but will help you.
These motors are rated at 416.6 oz-in torque max.
Lets say that you have wheels that are 2 inches in radius. You may have answered this already but what size wheels are you planning on using? I will continue assuming you will be using 4 inch diameter wheels.
So, torque measurement above / radius of wheel = rough estimate of the weight that each motor can carry.
416.6/2 = 208.3 oz.
There are 16 oz in a pound so, each motor can carry roughly 13 lbs when at the max stall torque. This isnt accounting for friction of the wheels on the ground or carpet.
You have 2 wheels working together, you would be able to move roughly 26 lbs at max stall.
Now, lets look at how fast the robot will move. 313 RPM is what these motors are rated for. your wheels have a diameter of 4 inches in the above example. we need to find the circumference which is done by multiplying the diameter X pi. 4*3.14159 = 12.57 inches per 1 rpm.
if we take that and multiply it by the RPMs, 12.57x313 = 3933.27 your robot will move 3933.27 inches in a minute or 65.55 inches in a second.
There are 5280 feet in a mile. if you look at how far it will travel in a second in feet (5.46) times 60 seconds in a minute x 60 minutes in an hour, you will see that the robot would travel roughly 3.72 miles per hour at full speed if the robot could move based on the torque calculations above.
Again, these are very simple calculations, not counting incline, decline, friction of wheels or anything else and only counting if weight was evenly dispersed directly between the two motors. If you had the third wheel and it were carrying most of the weight (most of the time in an R2 type robot it isn't, then this too would then factor into the calculation.
The average walking speed of a human is about 3.1 MPH.
I hope this helps and didn't cause confusion.
I see that you answered some of the questions earlier in the chain.
60mm = 2.4 inches roughly.
2.4/2 = 1.2 radius
416.6/1.2 = 347.17 oz per motor 347.17*2 = 694.33 oz total for a weight of 43.4 lbs. This is good for what you mentioned above, and if a 3rd wheel were used, you would be more than good.
The speed calculation remains the same.
Awesomeness! Thanks for chiming in. Definitely a huge help and verification of what I was thinking of doing prior to outting cash is always a good thing. Would've been bummed putting out $100 on a complete flop. Also thank you for the heads up on the saber tooth. The only reason I had theorized using the rc was because it seemed to be a bit more simplistic, but I would rather not temp fate.
2x25 saber tooth it is.