
Asked
— Edited
Can you show me some examples in Javascript of how to Setashome for V21? Can you also show me some examples in Javascript of how to Calibrate V22?
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skills (view all robot skills)

Stepper Servo
by Synthian Inc.
Control up to 127 stepper motors via Arduinos mapped to ARC servos; supports any stepper driver, serial network, home calibration, speed/accel.
Requires ARC
v21

Inverse Kinematic Arm
by Synthiam
Control robot arms with inverse and forward kinematics, converting X/Y/Z positions into joint motion and reporting end-effector location.
Requires ARC
v12

I could use some help on this one. Tried different scenarios but the if statement doesn't compile and the comport doesn't open. Could you please fine tune the software. Is there a certain area in the Arduino code that this should be inserted? I'd rather make these adjustments to code as needed on my end rather than update 40 different Arduino's software. It would be nice if we could get this to work.I can't figure out what you're trying to do. You need to provide information if you want assistance.
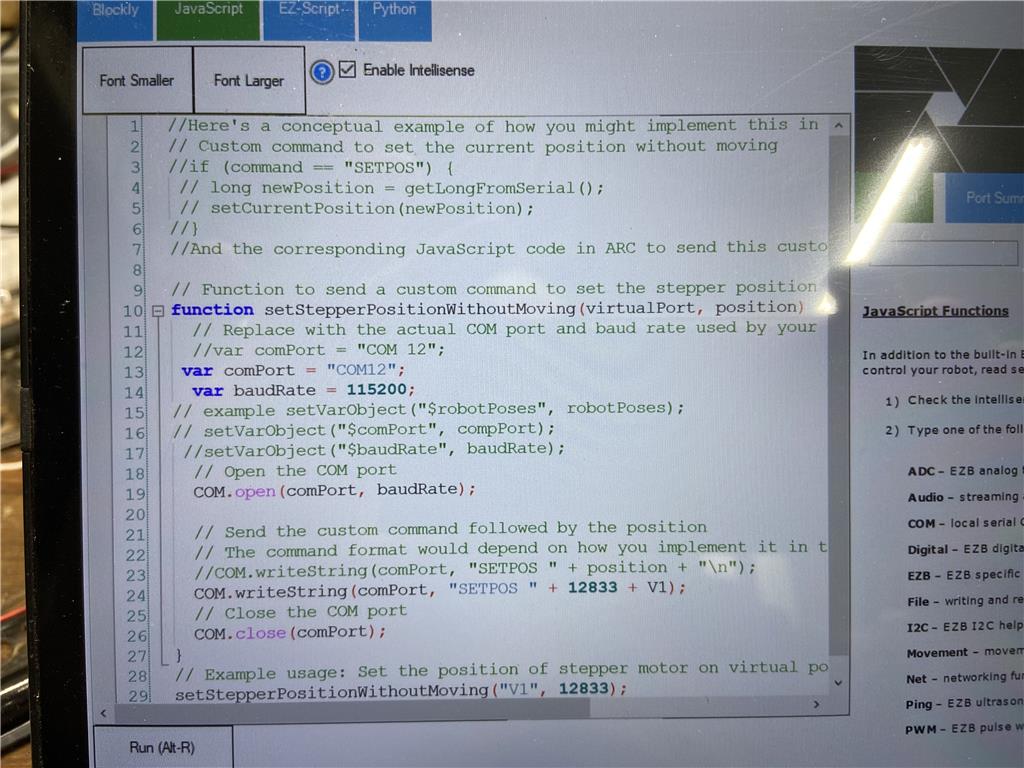
I am trying to set a position in the Arduino and in ARC . I copied and pasted Athena's code from the previous question/answer above, but it did not work.
To set a position of the stepper motor servo skill, you use the servo script commands, or any robot skill that uses servos. Read more about how to use servos in ARC here: synthiam.com/Support/ARC-Overview/Servo-Controls
If you read the above question, you will see that I was trying to move the servo position in the Arduino and an ark without actually moving the servo This would come in to play if had a very precise potentiometer, and I could tell it exactly where it is without moving anything
Are you trying to say that you want to set an offset for the servo?
If so, use the Fine Tune in ARC by either creating a servo profile, or use the fine tune script command.
No that is not what I am saying at all. I saw this feature on a high quality robot. They use a precise potentiometer or an absolute encoder to set the original location coming on a power up. The voltage is directly proportional to an exact location. The location is changed on the UI and behind the scenes in the driver. After that you just use the steps in the stepper servo skill. No movement is needed. If you require super precise then you can use the initial reading and then go towards a really precise limit switch. This why having the ability to change it's location without moving it would be very helpful.
what you are describing is how every other robot using ARC works, except yours, apparently. Because you are using stepper motors, you can only know the home position by a limit switch. From that home point, the servo commands know exactly how many "steps" to send to the stepper to move it into specified angles. So your Stepper does operate like a servo, if you learn how a servo works first, I think. You can specify an exact position with a Servo, and that includes the Stepper Motor robot skill + limit switch.
If you want to use a potentiometer, you will need a dc geared motor instead. Combine that with a kangaroo and sabertooth.
Otherwise, use the stepper as a servo. If you need further information, read the Stepper Motor robot skill manual or how a servo works here: synthiam.com/Support/Advanced-Fundamentals/servo-motor
You may also benefit from reading the Getting Started guide that explains the steps to build a robot here: synthiam.com/Support/Get-Started/how-to-make-a-robot/make-a-diy-robot