Alternative To Ezrobot Ezb For Robot Head Project
My course has primarily focused on robotics projects using the EZ-B controller and a camera for real-time interfacing. With recent developments, I am planning to create an additional video that incorporates Synthiam's support for other types of controllers. Although I've successfully flashed an alternative controller, it lacked compatibility with camera integration and Wi-Fi capabilities. The absence of an onboard computer limits the use of a USB camera, posing a significant challenge.
This dependency on specific components like the EZ-B, IO Tiny, and cameras can be problematic. For my course project, Mecha Morphix, which involves controlling five servos, the Arduino Mega seems excessive. I am in search of a suitable controller, compatible with Synthiam ARC, that includes both Wi-Fi and camera support to effectively replace the EZ-B.
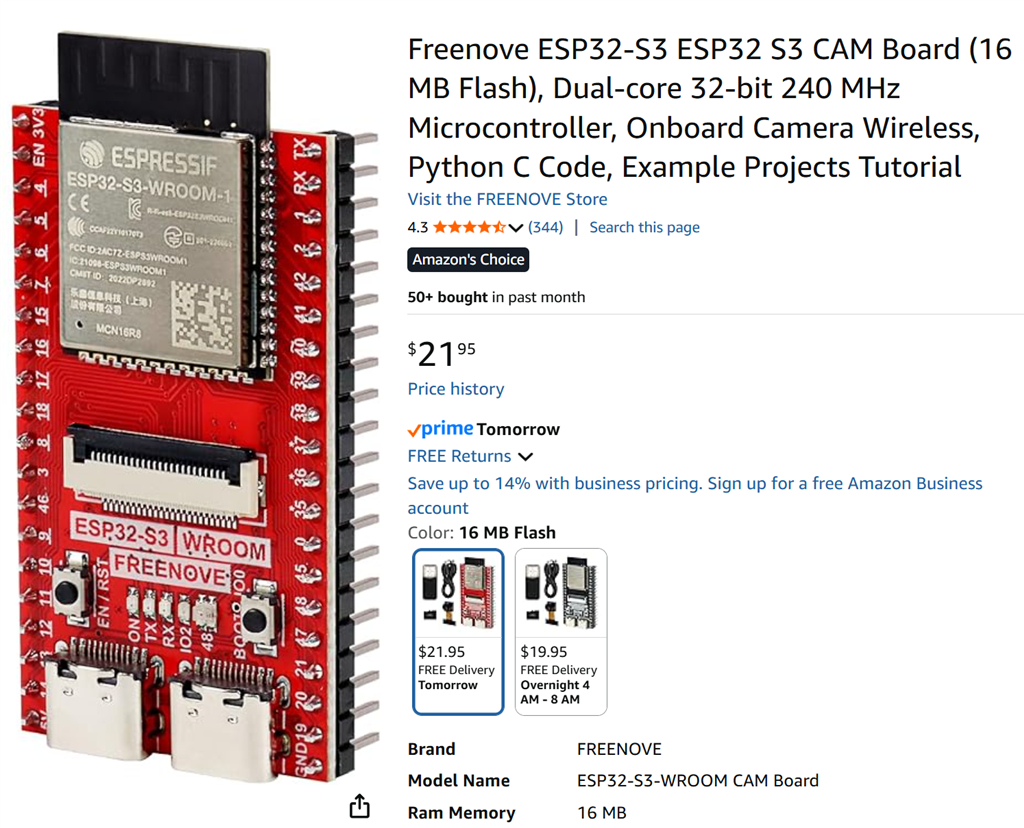
I noticed that the ESP32 with a camera is listed among the supported controllers for ARC. Has anyone experimented with using the ESP32 in conjunction with a camera for such applications? Any insights or experiences would be appreciated.
Related Hardware (view all EZB hardware)

Related Robot Skills (view all robot skills)



Well here is my quick bootleg EZB ...(Maybe EZBootleg_CAM_16) Its mocked up to sit vertically in the shoulders of the Mecha Morphix. Cost <$30 for ESP32 CAM, servo Controller and camera.
Its mocked up to sit vertically in the shoulders of the Mecha Morphix. Cost <$30 for ESP32 CAM, servo Controller and camera.
Nice you may want to throw some power management on this. I have already taken out an ESP and a PCA board with a 2S LIPO connected to 16 EZ-Robot HDD servos. (Stuck it in a JD robot). Now out of PCA controllers on order on a slow boat from China.
I've not had any issues with power, i have a buck to 5v in the pigtail, and a bench power supply for servos. But I am having this issue just now starting it for first time.
@Athena what can be the cause of this issue?.It connects fine to the ESP and camera works fine. But if i move a slider to move a servo it kicks the connection without moving servo.
Nice troubleshooting session - this looks very much like a power/board reset or firmware crash when the servos are commanded. Below I’ll give focused likely causes, the quickest checks you can run, and stepbystep fixes to try. I’ll also show how to enable the right skill settings (kebab menu) to collect more debug info.
Main symptom
Most likely causes (in order)
Quick checks (do these first)
Wiring & power checklist (very important)
Tests to isolate
Firmware / debug actions
Kebab menu: where to check skill settings & enable debug
Practical fixes to try now (ordered)
What I need from you to help further
Useful references
If you try fixes above and still see disconnects, paste:
I’ll walk through next steps after you paste those details (serial log is the most valuable). Want to start with the serial log and the exact power supply rating?
Well interesting. The tiny buck converter is causing some issues. If I off load it and replace it with a battery pack and plug into the usbc port on the ESP32 it works fine. Only when I plug into the bench power supply do I get failure. Maybe I soldered the 5v buck and barrel jack to the wrong place on the ESP32? I'll see check.
ok more testing and narrowed it down to the buck converter..so i connected up another one (7.5v to 5v 3 amp) to the USBC connector and all works well. I will say as I was messing around I have noticed that ARC drops connection (i.e computer remains connected the ESP32 in network). I have to click on 'connect" to regain connection. Have to see how often this happens.
Great debugging - nice work isolating the buck converter. That strongly suggests the original power supply was introducing noise or insufciently handling transient current, and that caused resets earlier. For the remaining ARC disconnects (ARC shows disconnected but the ESP32 still has network connectivity) here are the likely causes and a step-by-step troubleshooting plan to identify and fix it.
Likely causes (summary)
Immediate tests to collect data
Skill / ARC settings to inspect (kebab menu) Open the robot skill window (Single Camera servo Server and TCP Script Server Raw) click the kebab / hamburger (three lines) Settings:
Powerrelated checks (since you replaced the buck)
Network-level things to try
If disconnects continue: targeted tests
What I need from you to diagnose further
Useful links
Next step Start with a persistent ping and the ESP32 serial monitor simultaneously, reproduce the ARC disconnect, then paste:
I’ll interpret those and give the exact fix (likely a timeout/keepalive tweak or a router/PC WiFi power setting). Want to start with the serial log and a 60second ping trace?
I ran it for about an hour. Didn't have a disconnect and could not reproduce the problem. So maybe it was a ghost in the machine. Working great now.