All Community Content



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Robot Sticker

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

PCA9685 Servo Driver
Drive 16 servos over EZB I2C with a PCA9685 PWM controller, using ARC servo commands and...
Google Speech for ARC: cloud speech recognition with waveform, configurable response scripts and PandoraBot support

ARMadeus Mk.11 - 140 lb modular robot with EZ-B v4, universal base, interchangeable turret with dual pneumatic NERF disc launchers, onboard cameras,...
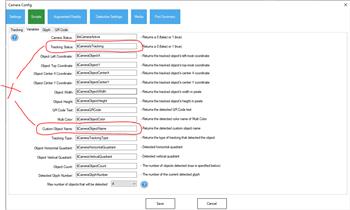
Camera Object Name
How do I reset or clear the last object detected by the camera? The $CameraObjectName variable stays set to the last object detected. This means even when no object is detected or...Tensorflow Emotion Recognition
Hello Ez robot developers. Thank you for this amazing platform. Please I am working on a project where I need to integrate a deep learning emotion recognition model i have personally developed in tensorflow with a robot i have built using EZ-Bv4. My emotion recognition model is able to detect emotions of people picked up by a camera. As I am a...Robie Sr Mod
Hello, was wondering what would be a great way of modding my Robie Sr. I’ve seen all the builds but I am looking for a mod for beginners. Would like to also add google voice on to the. Robot as well as moving arms and a camera for seeing. I sound like a noob, but would like to get my project Hoping you all can get me to the right direction.HTC Vive
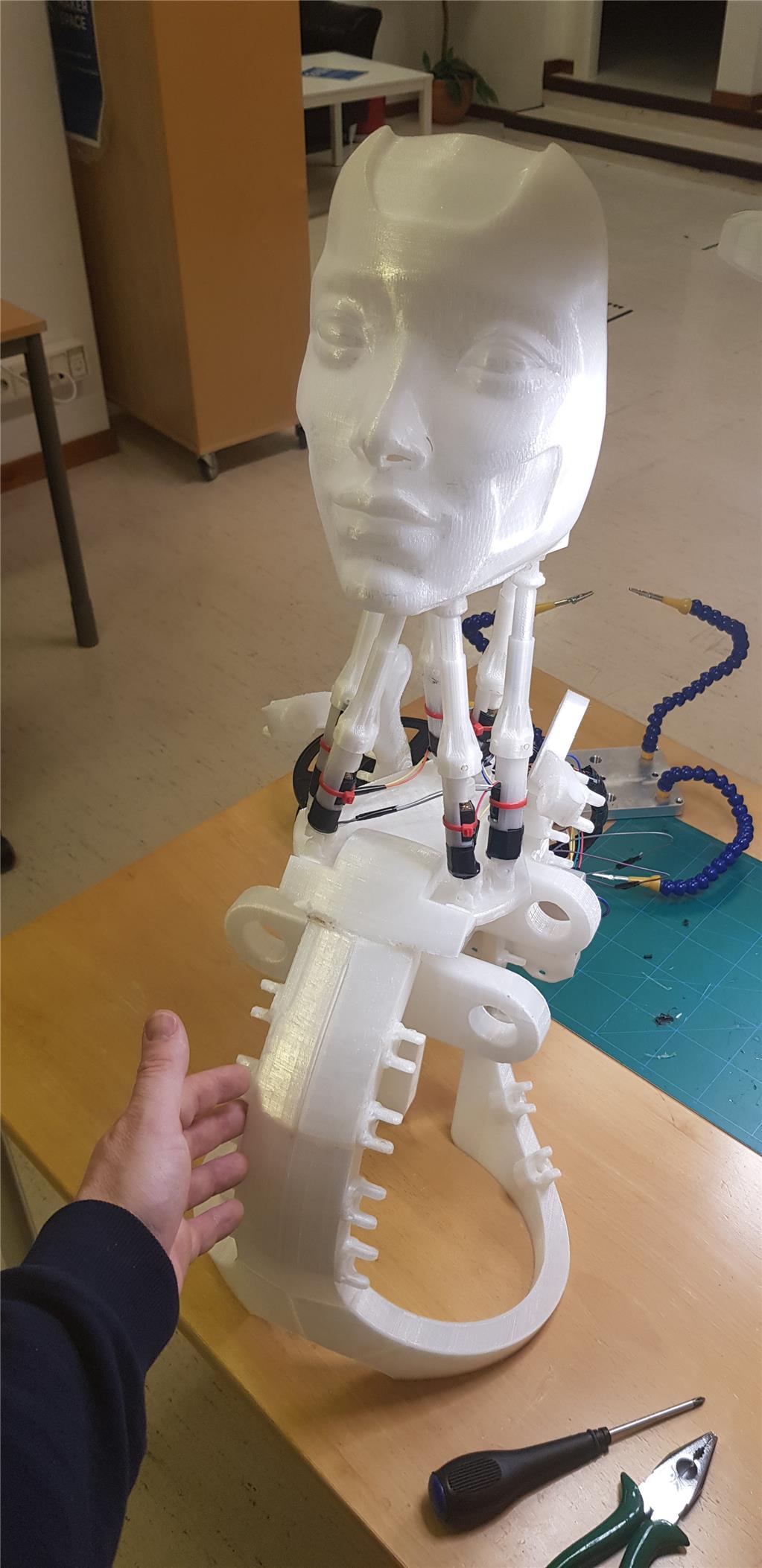
hi my name is rob and I'm taking part in a project which is a mobile telepresence robotic head controlled by the HTC Vive. the head has been designed and built and sits on a Stewart platform which has 6 servo motors controlling it. Iv got the platform working on a few different micro controllers. My task is to get this working with the HTC Vive...Using Pin 38 On Arduino Mega
Hi, i'm working on a robot called spotmicro (you can find it on thingiverse), i'm using arduino mega2560 and i'm not sure how to use pin 38 of my arduino, using ARC. I have selected virtual pin 38, but it doesn't work. Could you tell me please how to use ALL my arduino pins with ARC? ThanksWill Dialog Flow Support The Updated API V2?
Hi, my question is about integrating EZ-Robot JD Humanoid with DialogFlow. At the moment a DialogFlow Client Access Token is needed for configuring the DialogFlow plugin in ARC. The point is that DialogFlow Client Access Token will be deprecated as of March 2020 as part of the DialogFlow API V1. That means that in the new API V2, DialogFlow will be...Mobile App Editing Text In Blockly
The iPad software is not letting anyone to type into the test for Say EZB or Say PC. Once you click on the text, the window comes up to type into but you can see in the background that there is another window open for Duplicate, Remove Comment - drop down. No matter what is done the text never changes. Some schools, all they have is iPads. This...Use Android Mobile Joystick To Control Robot
Hello: I have been following EZ Robot for some time now. I am amazed at the progress you have made with this system. I am intrigued with the possibility of hosting EZ Build on a Raspberry Pi and controlling the bot with an Android device. I would like to use the Android mobile control Joystick to drive a Bot with a RPi as the EZB Host/Server. If I...Bumper Switch With Iotiny?
Hi there. Please could you tell me if i can use a simple on/off switch as a bumper switch on the ez-b tiny?? also can i use a Ir infrared obstacle avoidance sensor module?? Many thank charlie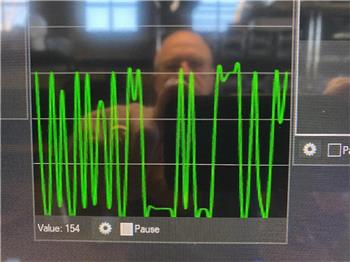
Moving Head Sound Detector
How do I get my sound detectors to give constant voltage readings on the ADC Graph? I am using the two detectors to see where the loudest signal came from then move...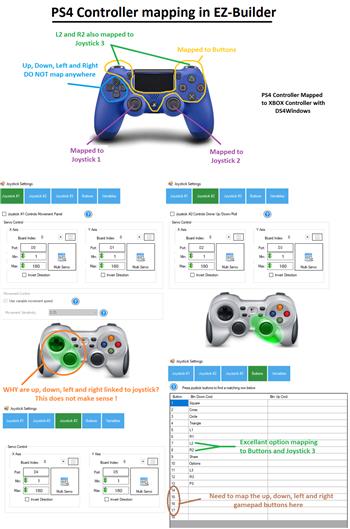
Joystick In ARC
The picture shows the up, down, left and right buttons are hard linked to the joystick, (buttons do not act like this) and this does not make sense. How do I map the up, down, left and right...