Robot Building Questions



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
"I build robots" Hoodie

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

PCA9685 Servo Driver
Drive 16 servos over EZB I2C with a PCA9685 PWM controller, using ARC servo commands and...

Control Roomba/Create via ARC: drive, stream sensors, read encoders, configure COM/HW UART, and send pose to NMS for mapping/navigation.

InMoov robot running on EZBv4 with 24 servos controlled successfully, demonstrating reliable single-board servo management and setup success.
UART Byte Array Communication Explained
Hi @Athena, I'm asking about the best way to communicate via UART between an EZB4 (JavaScript running on the EZB) and an Arduino Mega (C++)....
Set Servo Angle In Blockly
Hi - I'm looking for a Blockly block/function in Synthiam ARC that will move a servo to a specific position (set angle). Any help appreciated? For context: I'm using...
RPLIDAR Script Data Not Updating
I am using the RPLIDAR skill in ARC. The scan view is working correctly and I can see real-time obstacles in the UI. However, I cannot access usable scan...
Adding An Action To An Existing Script
I have a question about adding an action to an existing script I have that is written in JavaScript for ARC. I currently have two different ARC...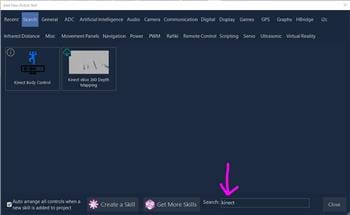
Depthsensor Plugin Load Error
I have a question about the ARC Robot Skill "DepthSensor." I was looking for the Kinect Body Control skill but couldn't find it. After some research, I...
Using Brushless Motors With ARC
just a question with this cycloidal gear, it can be used with these skills ? Sabertooth Movement Panel Brushless Motor Movement Panel Dual Hbridge W/PWM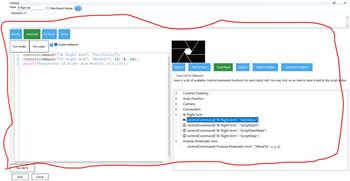
Inverse Kinematics Guidance For Cybot3000
I have a question regarding the use of the Inverse Kinematics Robot Skill in Synthiam ARC. I've managed to create the general arm...
ARC Keeps Blocking Windows Shutdown
I'm having an occasional issue with Windows shutting down when using the Utility.shutdownPC(); command from an ARC script. Background and setup: - I...
Arduino Serial Communication Troubleshooting
Hi @Athena, I'm using the following code snippet on an Arduino Mega that is communicating via UART with an EZB4: if...
Joystick Release Servo Reset
I have an XInput joystick and four servos connected to an EZB (servos on D12-D15). In my ARC project I’m using the Joystick (XInput) Robot Skill. The left stick...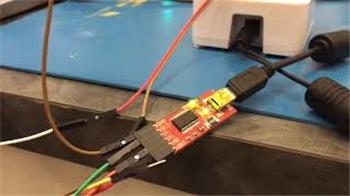
Usb To Serial Connection Camera Option
With the option to use the EZB in serial to USB you lose the option for the camera since the connections use the camera port. Is it possible to...