
Asked
— Edited
Usb To Serial Connection Camera Option
With the option to use the EZB in serial to USB you lose the option for the camera since the connections use the camera port. Is it possible to add another EZB like the IO Tiny to connect the camera too, then hard wire both EZBs together? I can't use Wi-Fi on either EZB.
There is a very specific reason I want to use the EZB camera and not a usb webcam, but i still need the EZB wired to the computer.
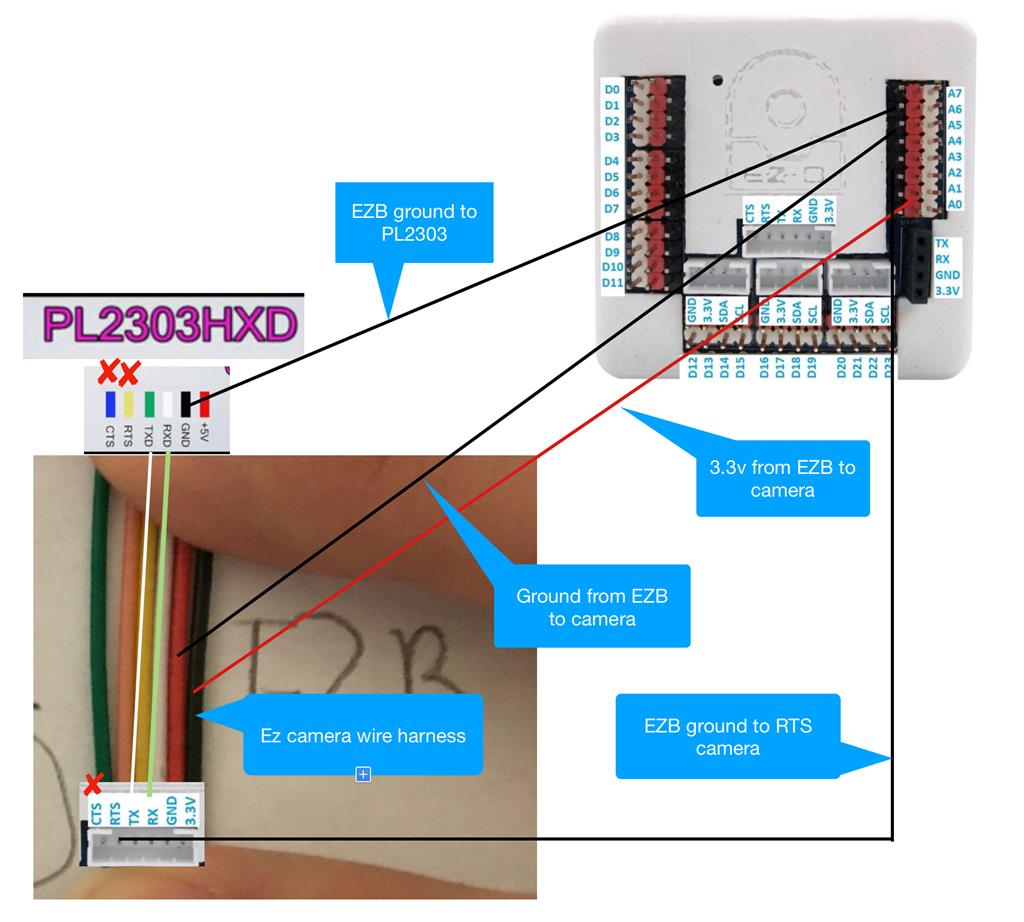
Edit: Please visit post #37 for the update on the usb/serial cable I used, new wiring diagram and notes

Connecting the ez-b via serial uses the camera connection. By doing so, you lose the ability to have a camera on the ez-b. This is okay because most scenarios use a usb camera wired to the PC - since the PC is obviously inside the robot due to the serial connection. Find out more here: https://synthiam.com/Tutorials/Lesson/76?courseId=4
Now - you "could" connect a camera to a USB <-> UART adapter dongle that supports 3,333,333 bps and RTS/CTS. Those are easy to find
Any recommendations on a dongle?
And how then do you connect the EZ camera to this set up?
There do not seem to be many (not as many) that can support 3M baud! eek
I don't know that was a thing. DJ, does the adaptor need to support 3M baud or does it actually need to be higher, since you said 3,333,333 bps?
I did find this one which seems to fit, what do you think DJ? https://www.amazon.com/GearMo-FTDI-UART-Adapter-Cable/dp/B004HX3XMI
The end would have to be cut to break out the wires.
Higher
Well DJ, you are raising the stakes! As Worf's son Alexander once said, "The Higher....The Fewer!" (STNG Episode: The Perfect Mate)
USB-UART is not as simple as I used to think it was. Reading through some information, it looks like some of the common FTDI chips are "capable" of up to 12M baud, but that does not mean the device they are in is capable of that.
https://www.alliedelec.com/ftdi-ttl-232r-3v3/70069395/?mkwid=syCqgdu9J&pcrid=224909203636&gclid=CjwKCAjwj8bPBRBiEiwASlFLFQADnzZKLqGy0RxMu5BtNARW4lwuEbuyZZ1CHuOSocv8wG5jz6pXghoC_4UQAvD_BwE
This one says "Maximum Baud Rates for RS232 Versions Is 1M Baud and for the RS422/485 Version is 3M Baud (Single Channel) and 10M Baud (Multi-Channel) "
My guess is the camera is not Multi Channel? My guess is also the camera device is preset to baud rate (no jumpers) so if the UART device can't specifically select that baud rate then the camera will not work, am I right?
DJ, could you help us find a dongle for the camera? I'm interested in one as well but I'm getting out of my depth of knowledge.
Ok i’m Going to make myself more clear as to what I’m attempting.....by making a picture. In this example I have two EZBs instead of confusing things with the io tiny which has no uart.
Question: can I connect (wired) the two EZBs together and control via one ARC? To be clear really EZB 1 is transmitting Camera to EZB 0 and to the computer via usb/serial.
No - that is not a thing. I answered question and the conversation has been on the same topic. You need a uart to USB adapter that can work at more than 3,333,333 baud. There are plenty which can.
Simply purchase a uart to USB adapter that can operate at a rate higher than 3,333,333 baud.
Look at these maybe? It'll need rts and cts lines
https://www.ftdichip.com/Products/Cables/USBTTLSerial.htm