
























hi all
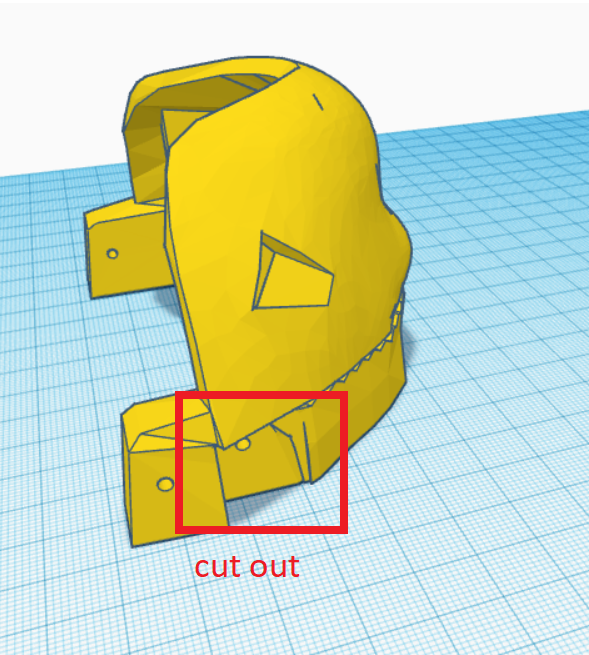
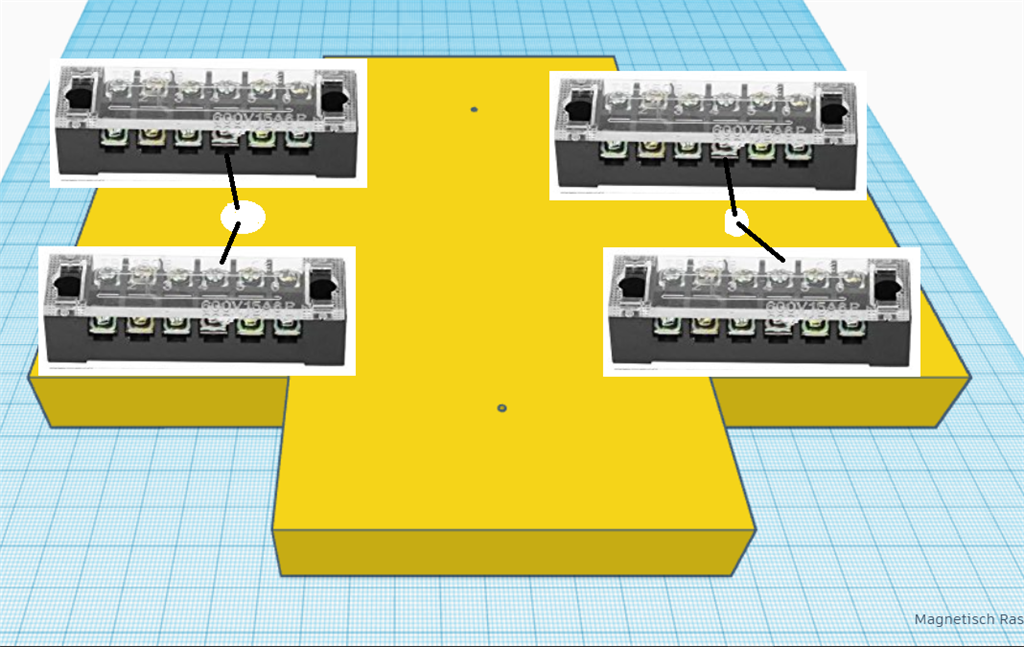
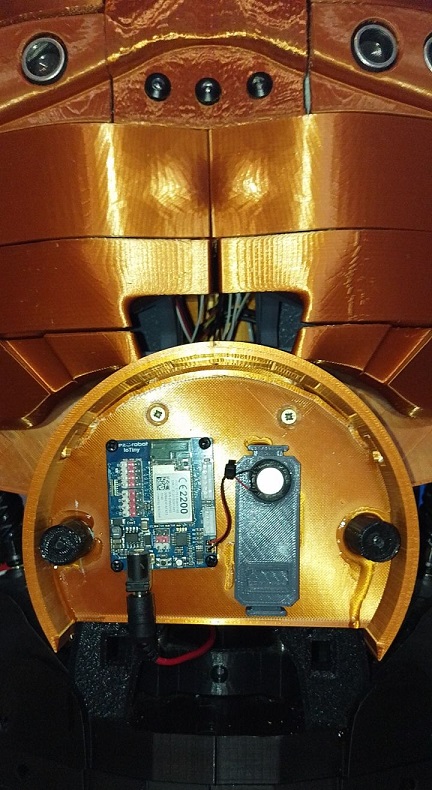
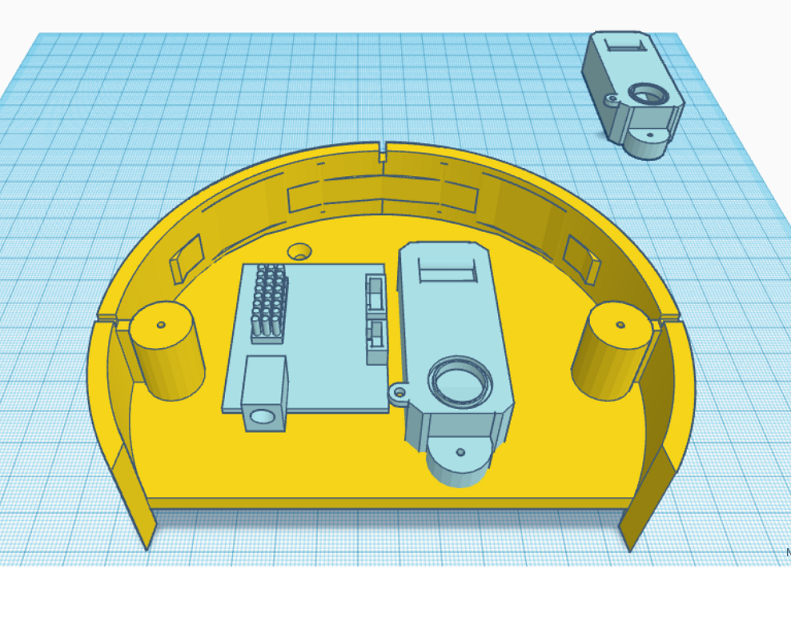
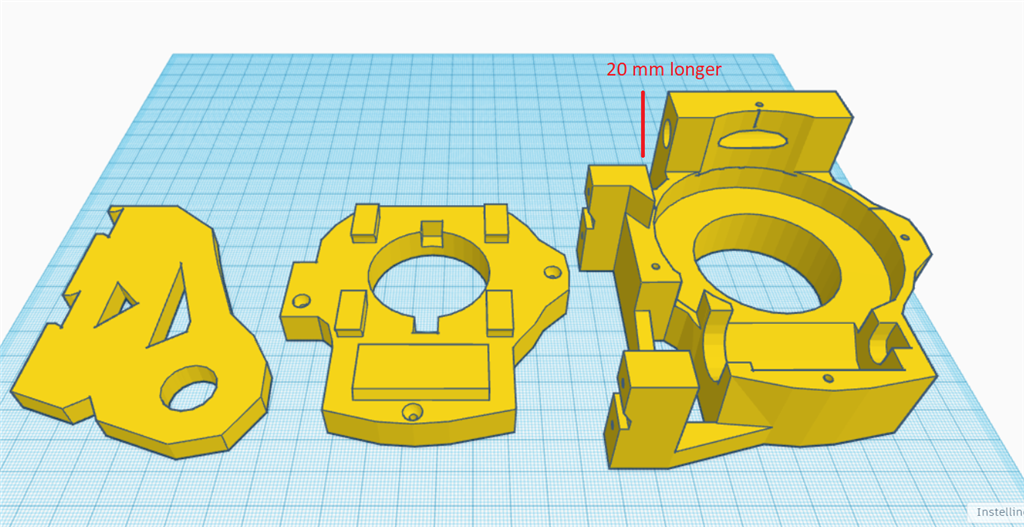
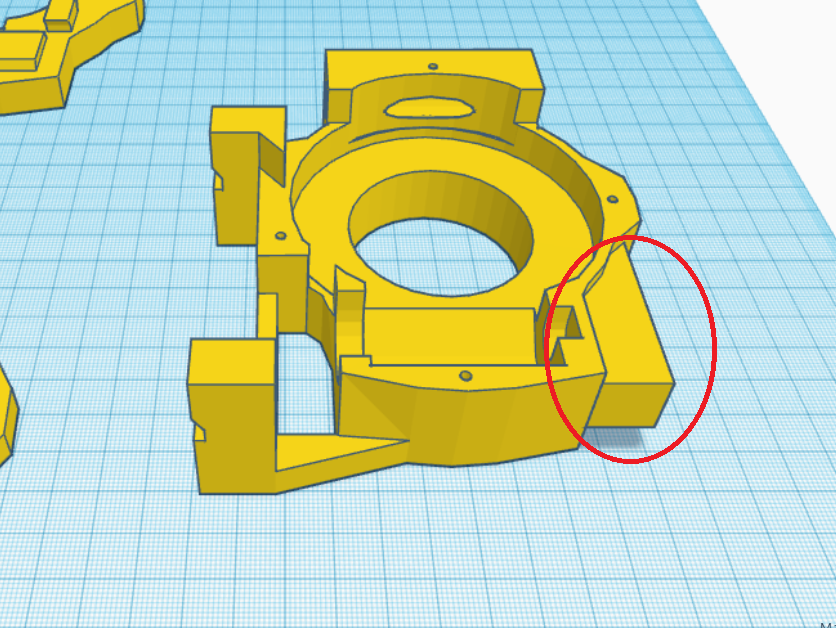
I've created a modified version of the EZ Robot head, featuring both side-to-side and up-and-down (yes) movements. This new design includes an improved base for the head, accommodating three additional HDD servos. There's an option to install two cameras, with the base designed to allow passage for a second camera cable. This setup is ideal for incorporating additional IoT devices or EZBV4, for instance, for LED lighting. Conveniently, there's no need to remove the potentiometer from a servo, as the 1 to 180-degree range provides ample movement. The base height is 7.2 cm.
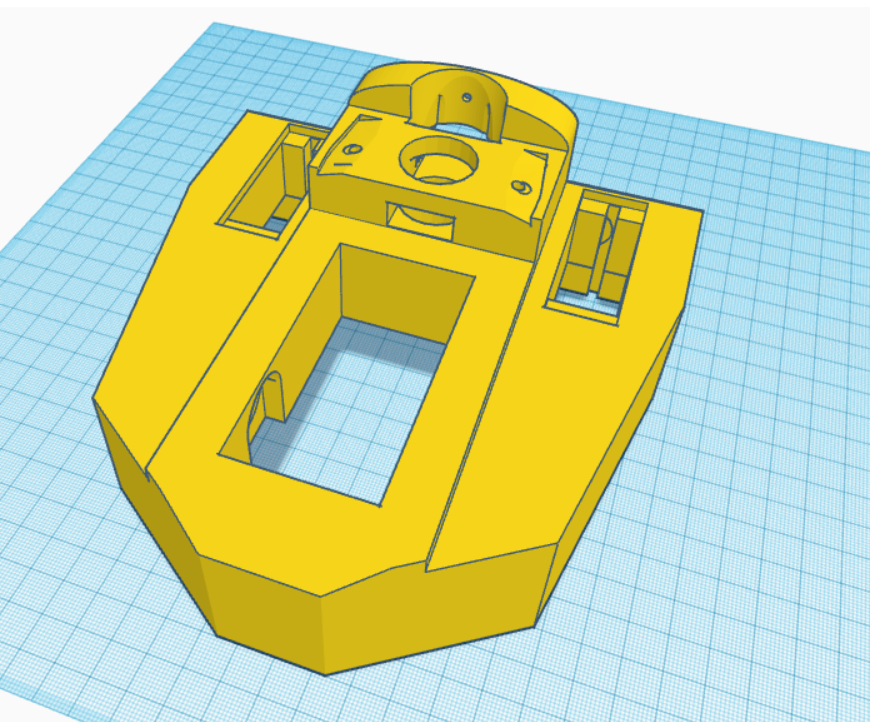
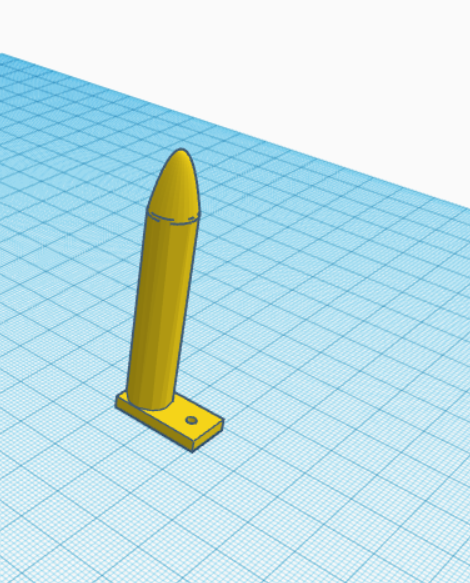
The pistons are original components from InMoov, and the neck base in EZ Robot is correctly designed.
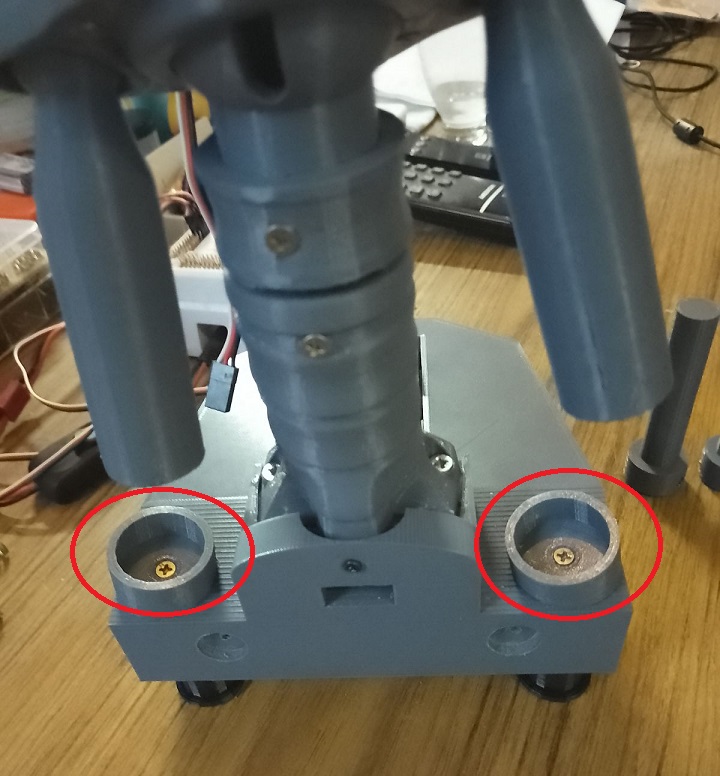
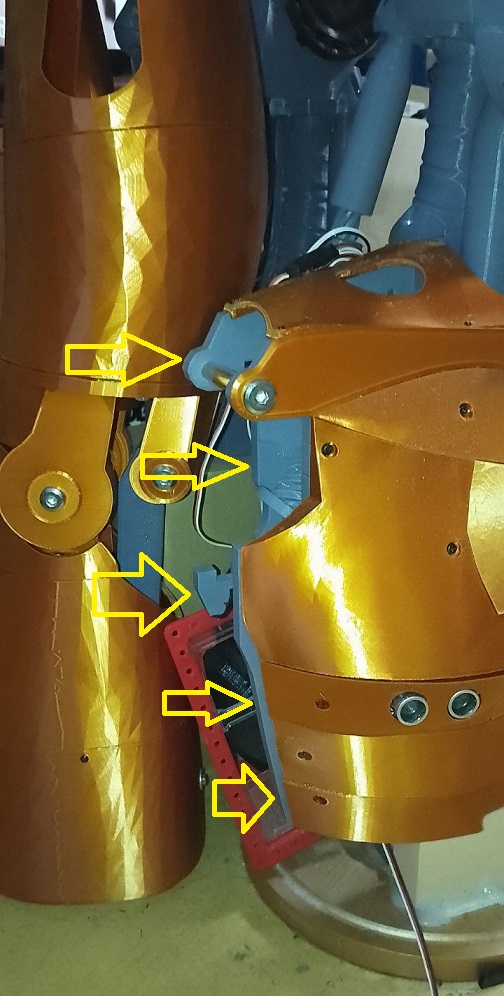
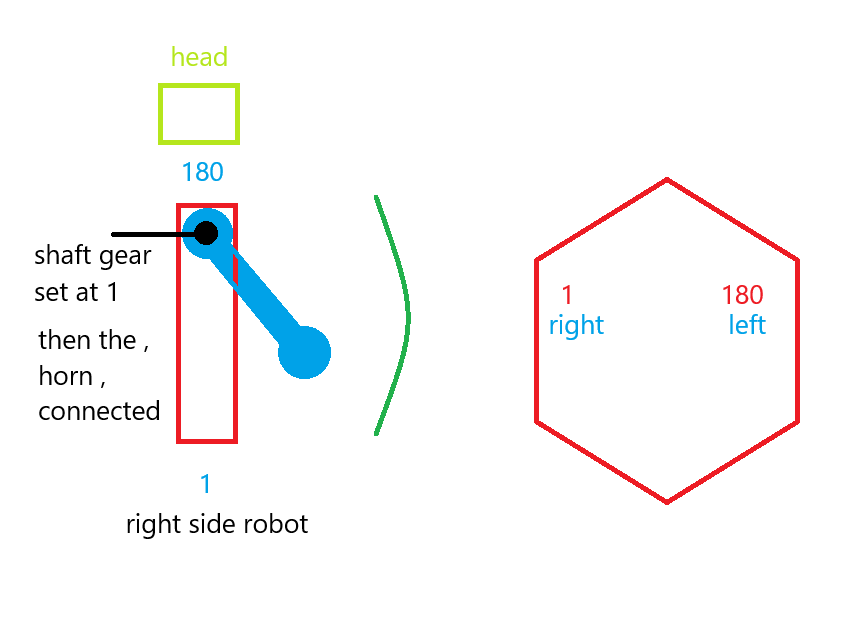
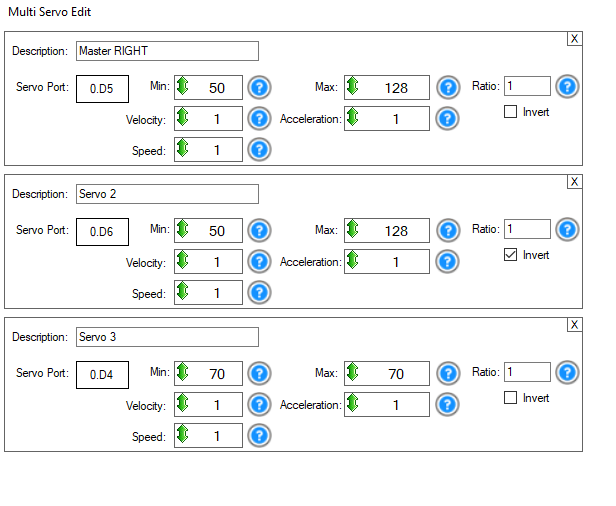
For moving the side pistons, adhere to these settings:
Programming
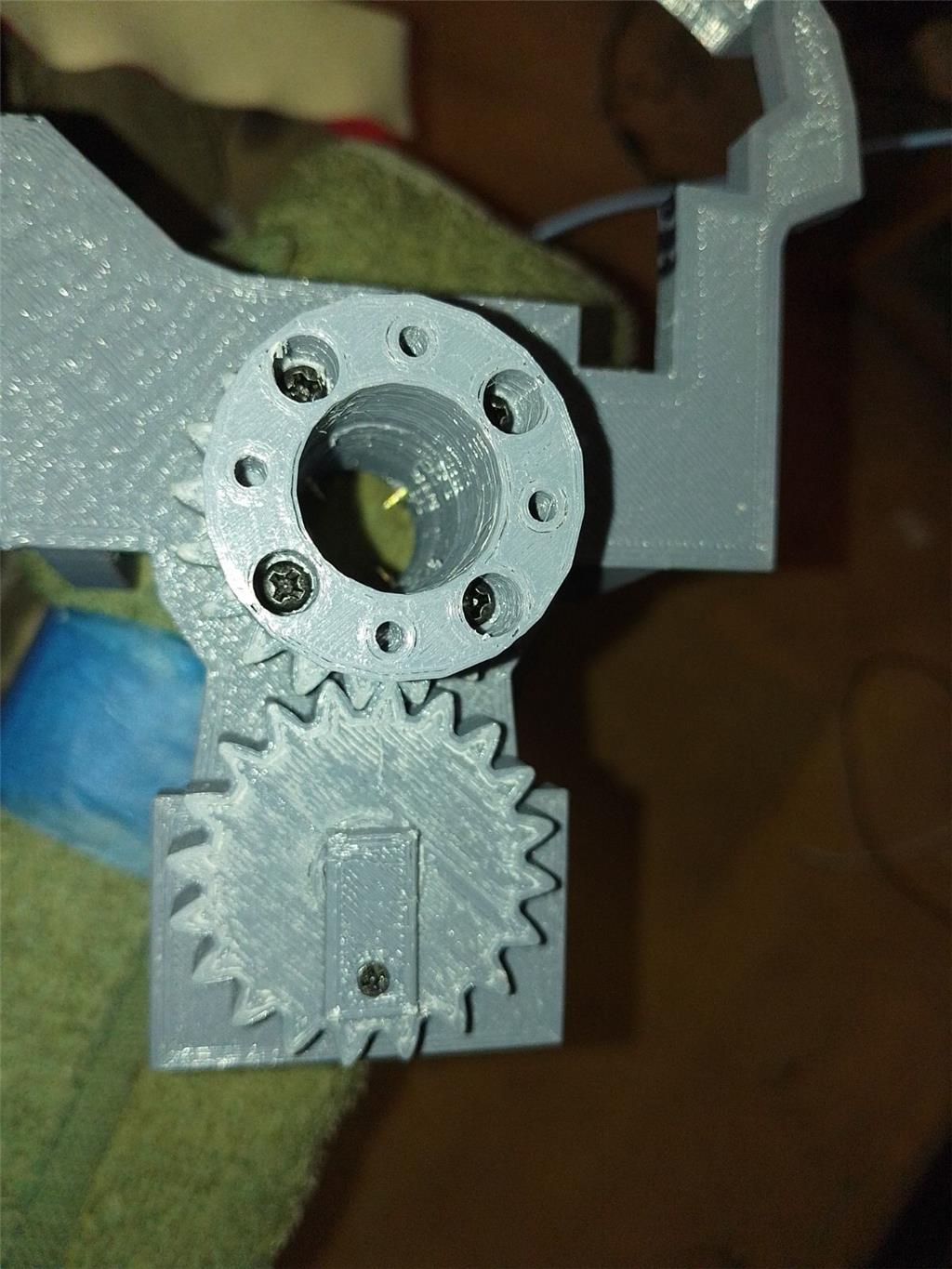
Adjusting the side pistons can be a bit complex. Start by calibrating your HDD servos. Then, align the inner piston with the holes in the piston base and secure it with a screw. For the second side piston, align it similarly, then disconnect the IoTiny. This allows you to manually adjust the previous piston to properly position the second one. The original documentation on EZ Robot is extremely helpful in this process.
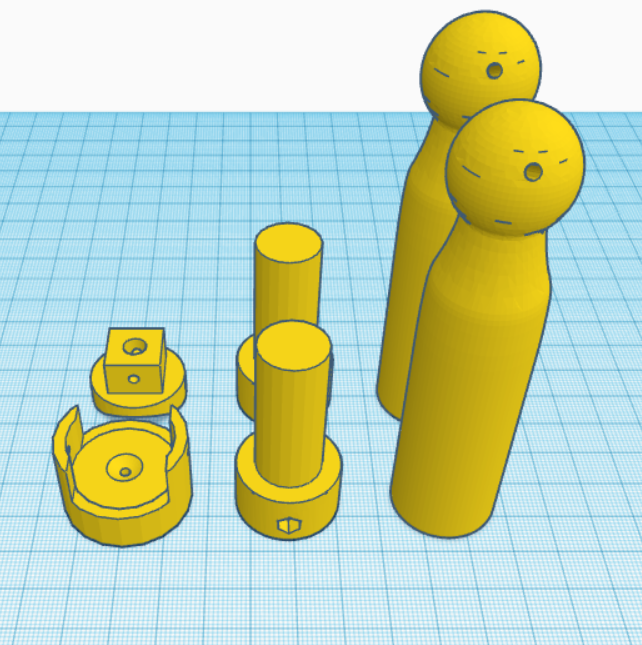
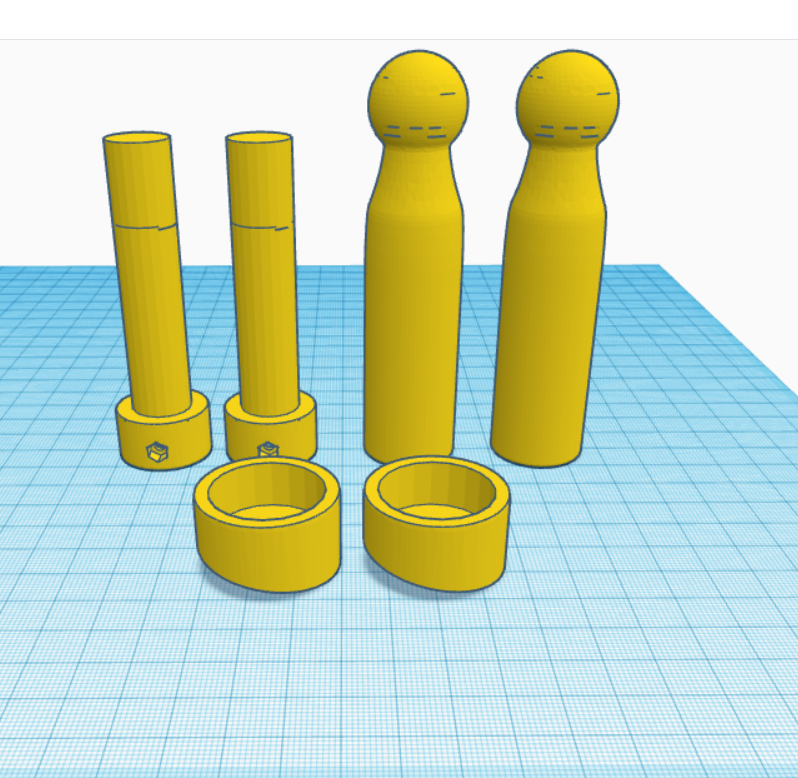
Parts & Materials
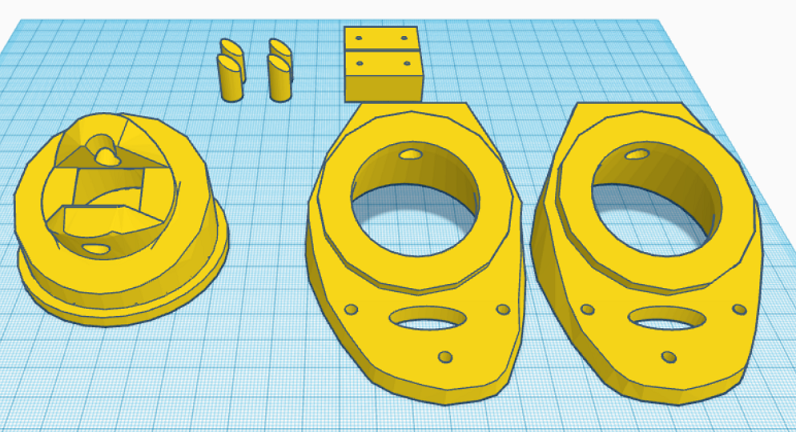
You'll need 3 extra HDD servos and grey PLA filament. The drive shaft parts should be printed with a 35% infill and a gyroid pattern in your slicer for enhanced strength. Other parts can be printed according to your preferences. Additionally, there's an optional neck extension, offering one to three extra vertebrae for more piston movement space. In my experience, the two-vertebrae option works best.
Discover more robots

Rb550f's Ez Robot Rover

Lumpy's Lumpy's Robosapien

thanks anyway I figured it out
hi:)
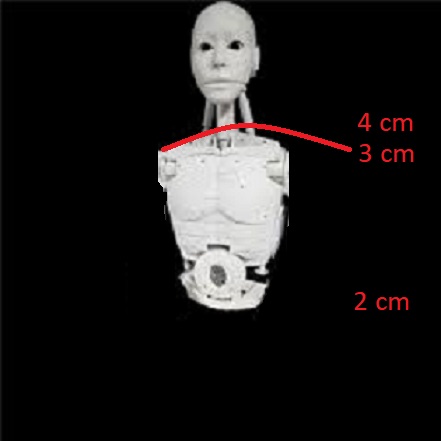
some thoughts about the right&left side ways movement . if below waist the motion is 2 cm .would that not be more shoulder hight ?
hi
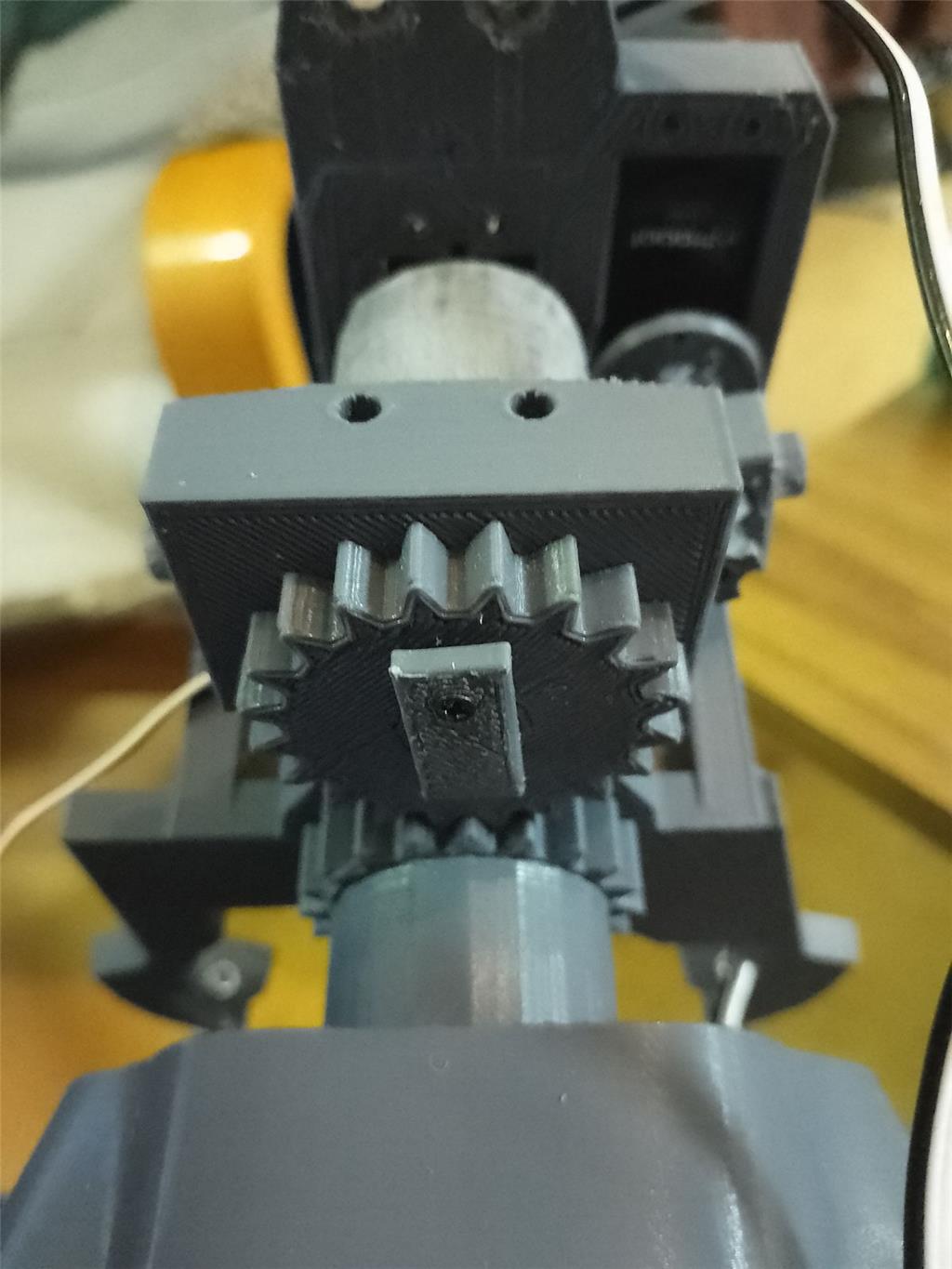
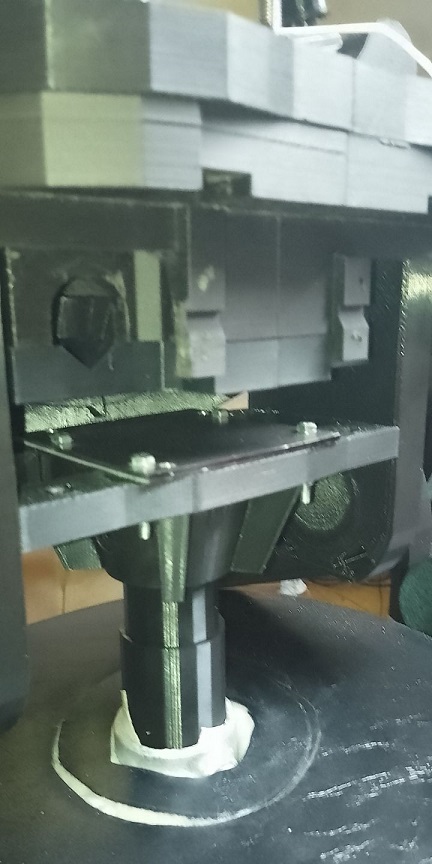
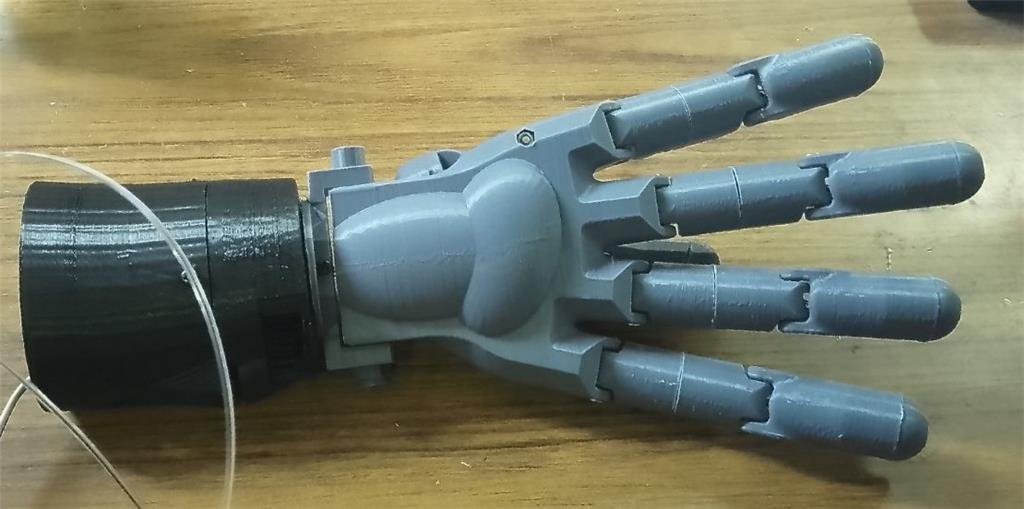
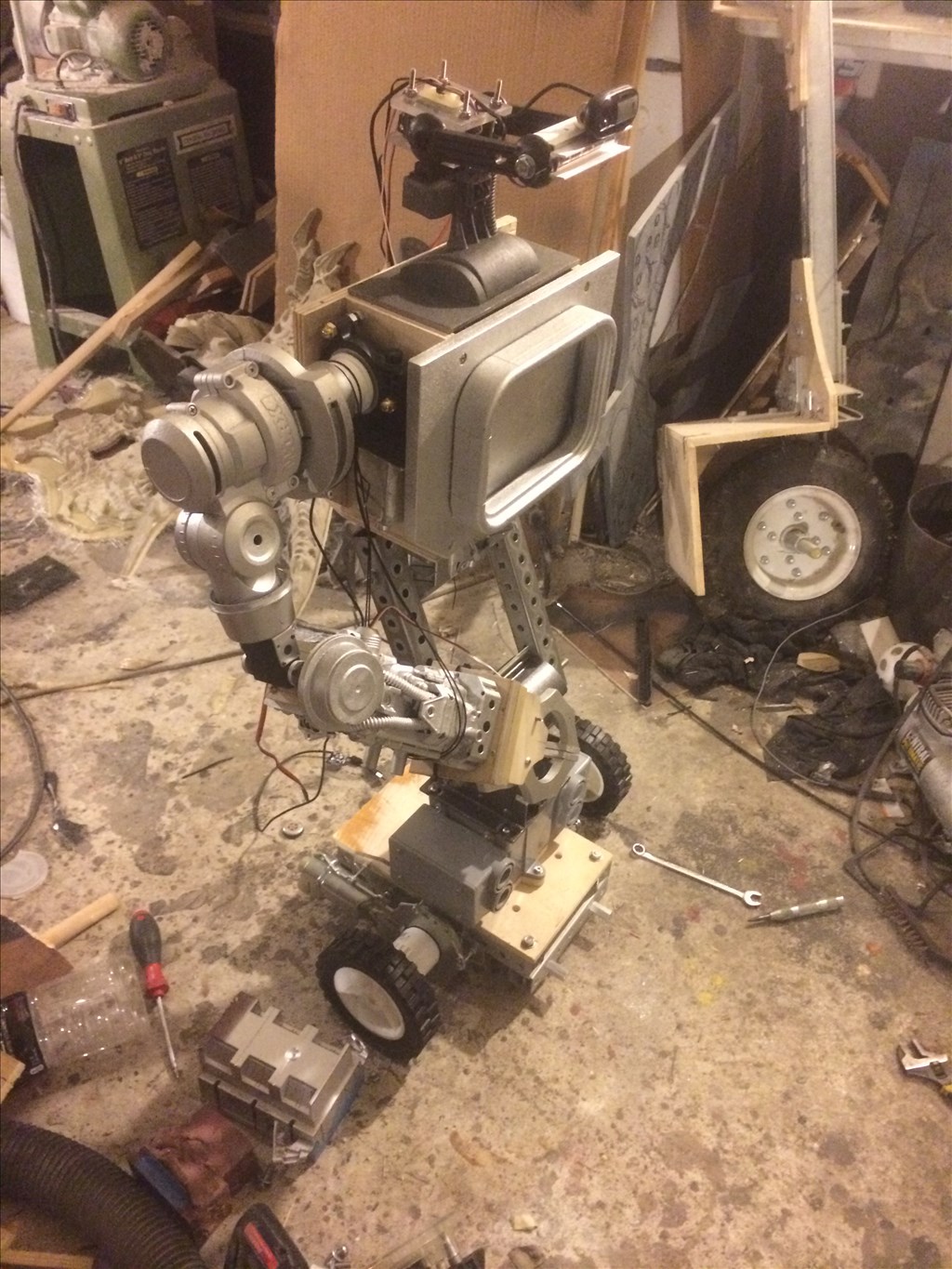
back to the waist part from inmoove . doing some test . i use the HDD standard servo's . you can see how obliquely , the middle bar goes . imagine 50 cm higher .how far the schoulder , will go . i think there's no need to get the pot out . waiting for parts .
https://www.youtube.com/watch?v=1MAAEy47MIk
hi
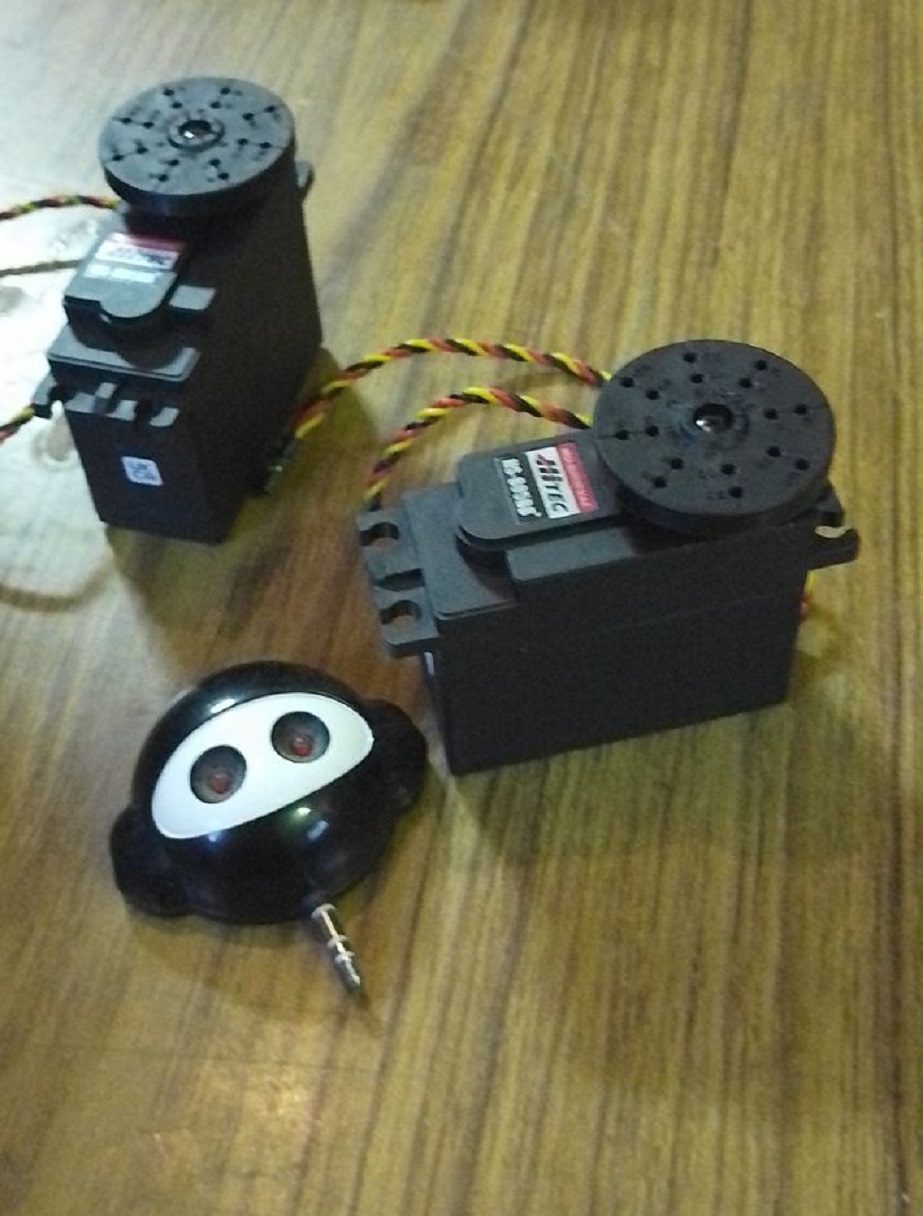
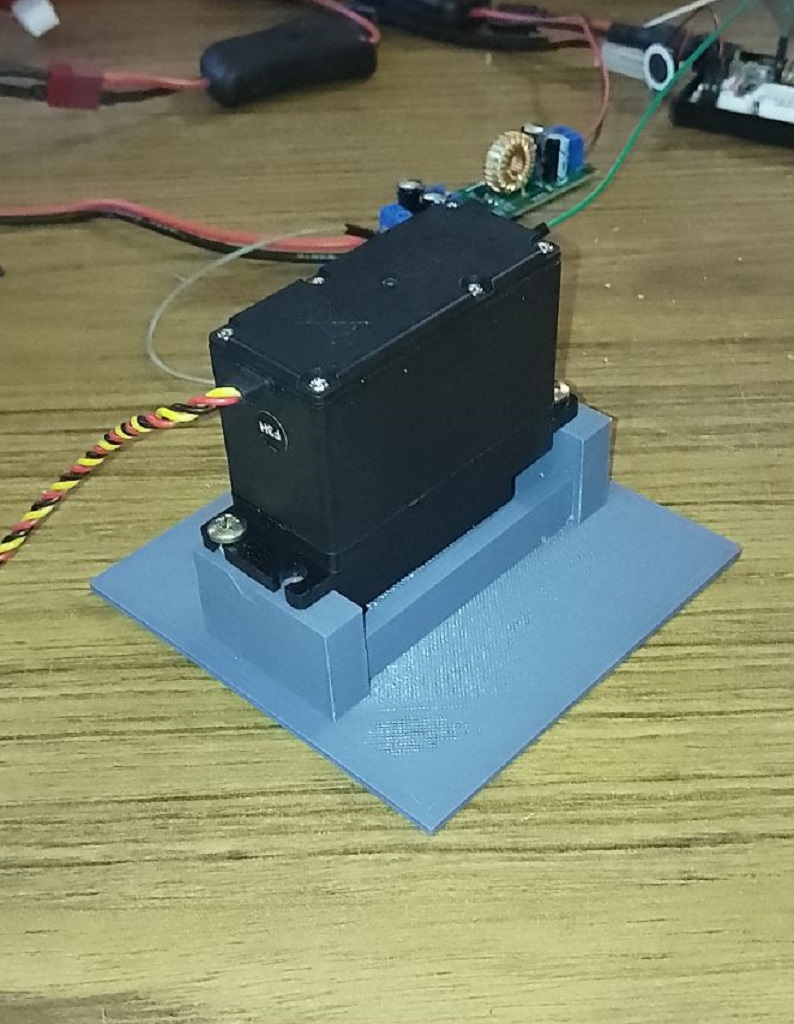
the inmoove uses the big servo HS805BB 6 volt . my question is . do i need to use the voltage regulator ?
https://www.ez-robot.com/store/p39/robot-power/inline-5v-regulator.html
hi
first two big servo's has arrived .
hi all
the new babies has arrived . big servo's 7.4 volts . you would think that pictures big servo's on the shop all looks desame . that the size is also desame .wel its not . they are smaller . means the place of the inmoove hip is to big . bummer . this hip part gives me all hell you can imagine .
bummer . this hip part gives me all hell you can imagine .
problem solved .
Wow that is annoying. Hope your hand gets better quickly. How much torque were you trying to move. You would think they would have stall protection for that price.