


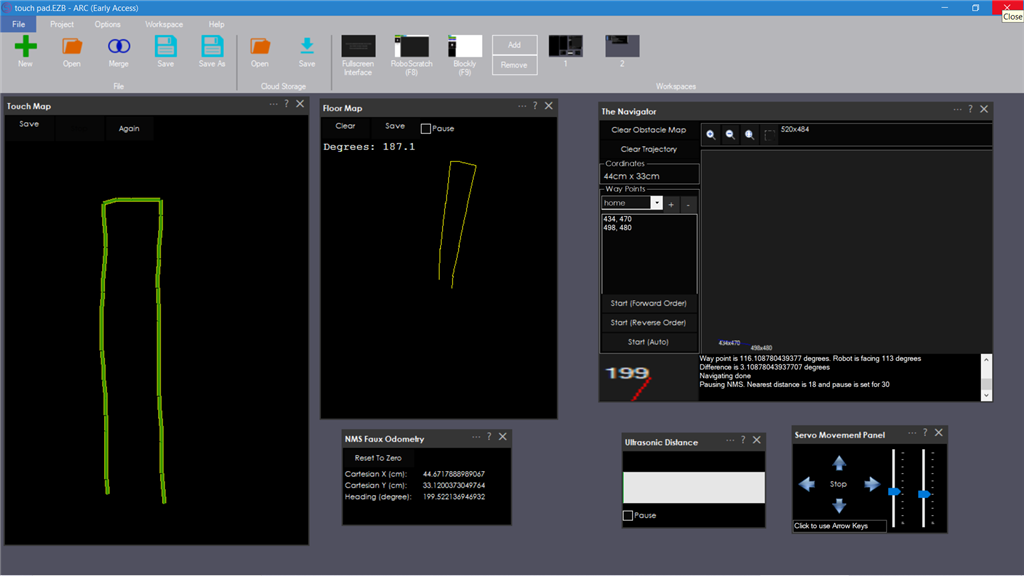
I am using the Floor map and Touch path maps and the Navigator, for simple path following - I am at my farm, on a hotspot and dangle with an IoTiny
my car follow it very nicely
Video will follow soon
For actual navigation with way points, you need one of the Intel Realsense cameras
EzAng
By EzAng
— Last update
Discover more robots

Jstarne1's Hulkbuster Ironman Suite , Lighting, Sound...
Custom Hulkbuster Iron Man suit with servo helmet lift, glowing repulsors, sound effects, 3D fit measurements and...

Robot's First Attempt Building An Android App For The Irobot...
Upgraded Dirt Dog speakers to 8 ohm 2W 1in and hidden inside the dust bin, gaining extra space after removing the vacuum...

Danbachmann's Dandroid 20Xx
EZ-B v4 Cybot robot uses IR and ultrasonic sensors for obstacle avoidance, wireless monitoring and human/animal activity...

Nice ezang, waiting for the video!!
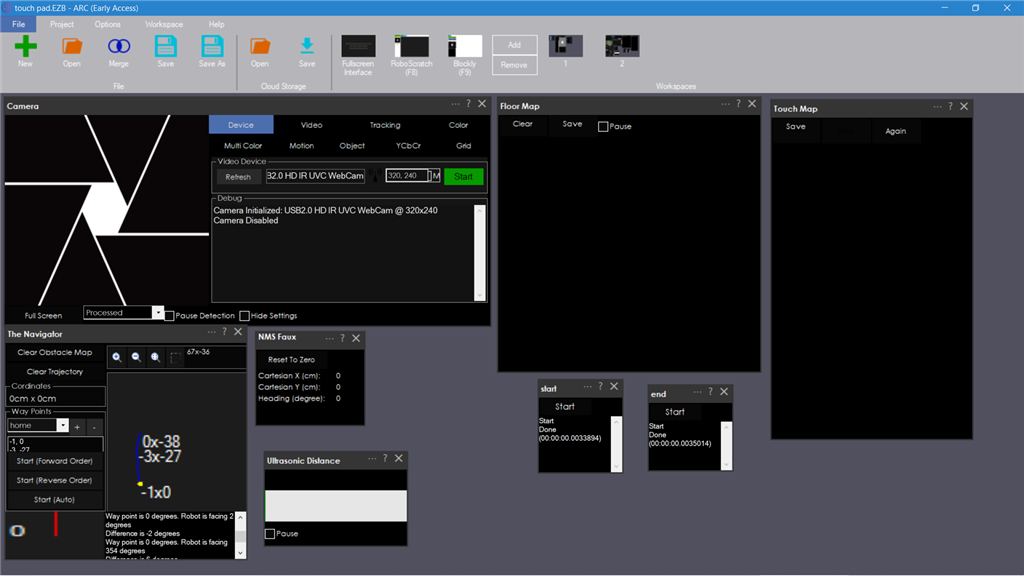
EzAng, That looks good. I wonder how it would work with the new NMS Faux Odometry and the Navigator, maybe you could set way points once you have your robot setup?
I plan on testing this all soon, thanks for viewing
Touch map is going great, fine tuned it for navigating back to me, the NMX faux odometry reads well which corresponds to the navigator's readings - can't do a video now, at the farm, try in a few hours in a city :-)
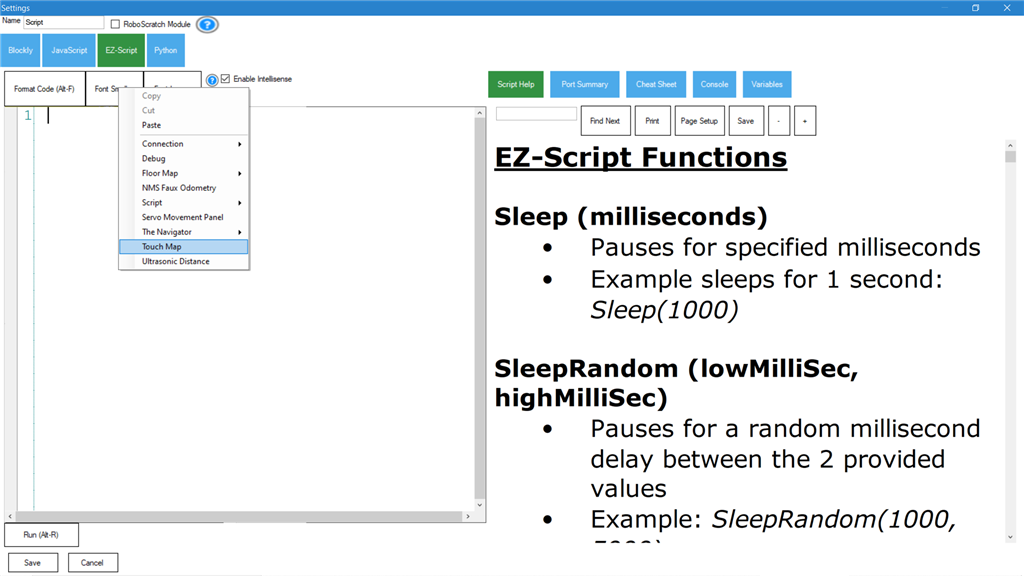
I notice in touch map, when I go to ad code there is no way to add any code - same with the ultrasonic sensor
Here is one video for now of the touch pad, wish I had a way to make way points and can label them, maybe one day
more to come
Use The Navigator if you want way-points. That’s why it exists.
For pose telemetry, use the Faux Odometer robot skill combined with The Navigator.
EDITED: I was working from memory. After looking in ARC I changed my answer below.
Very fun stuff. Amazing technology. How much easer can it get for us! LOL
EDITED: never mind. I didn't know what I was talking about. LOL.