
















As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
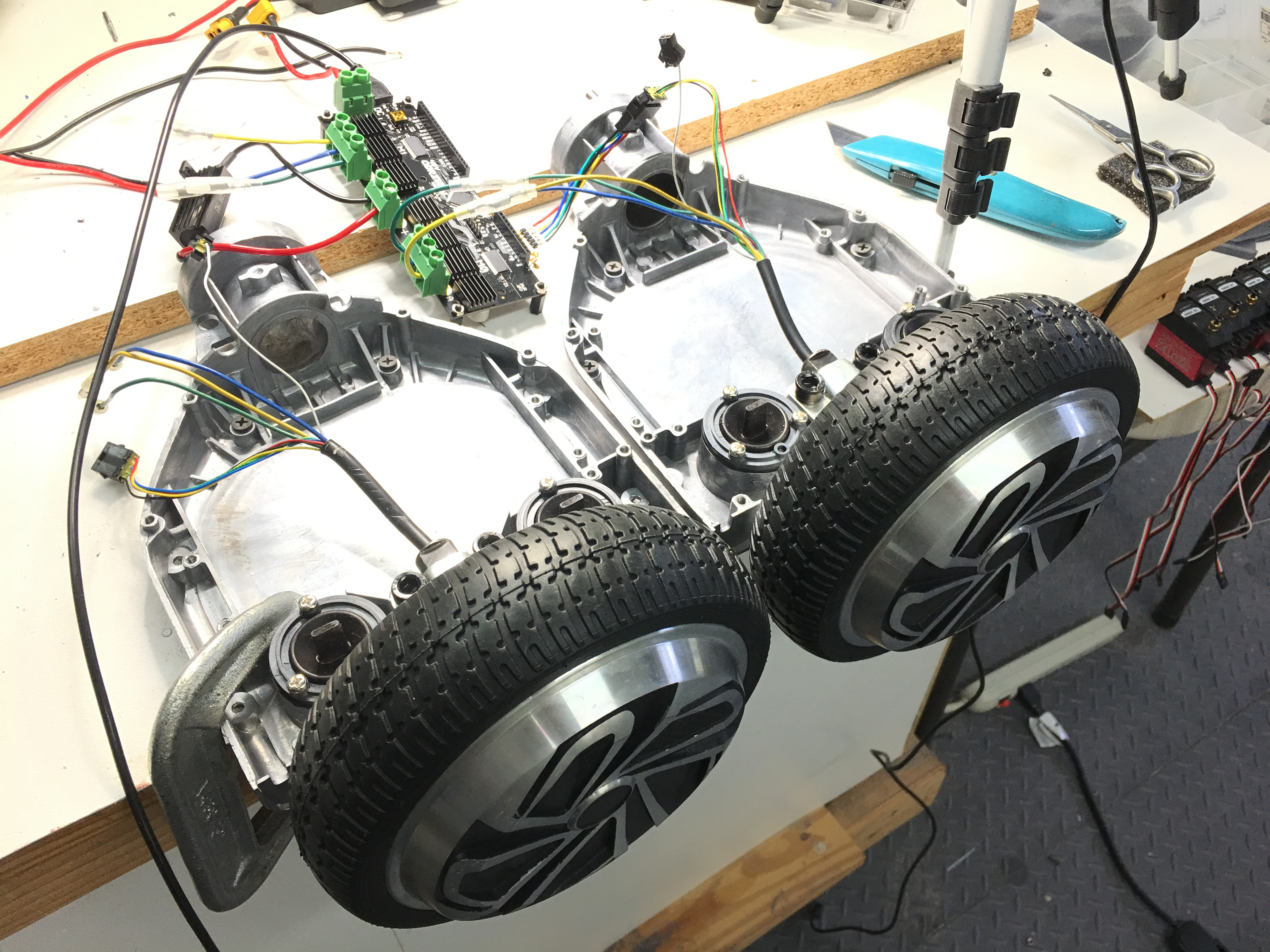
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
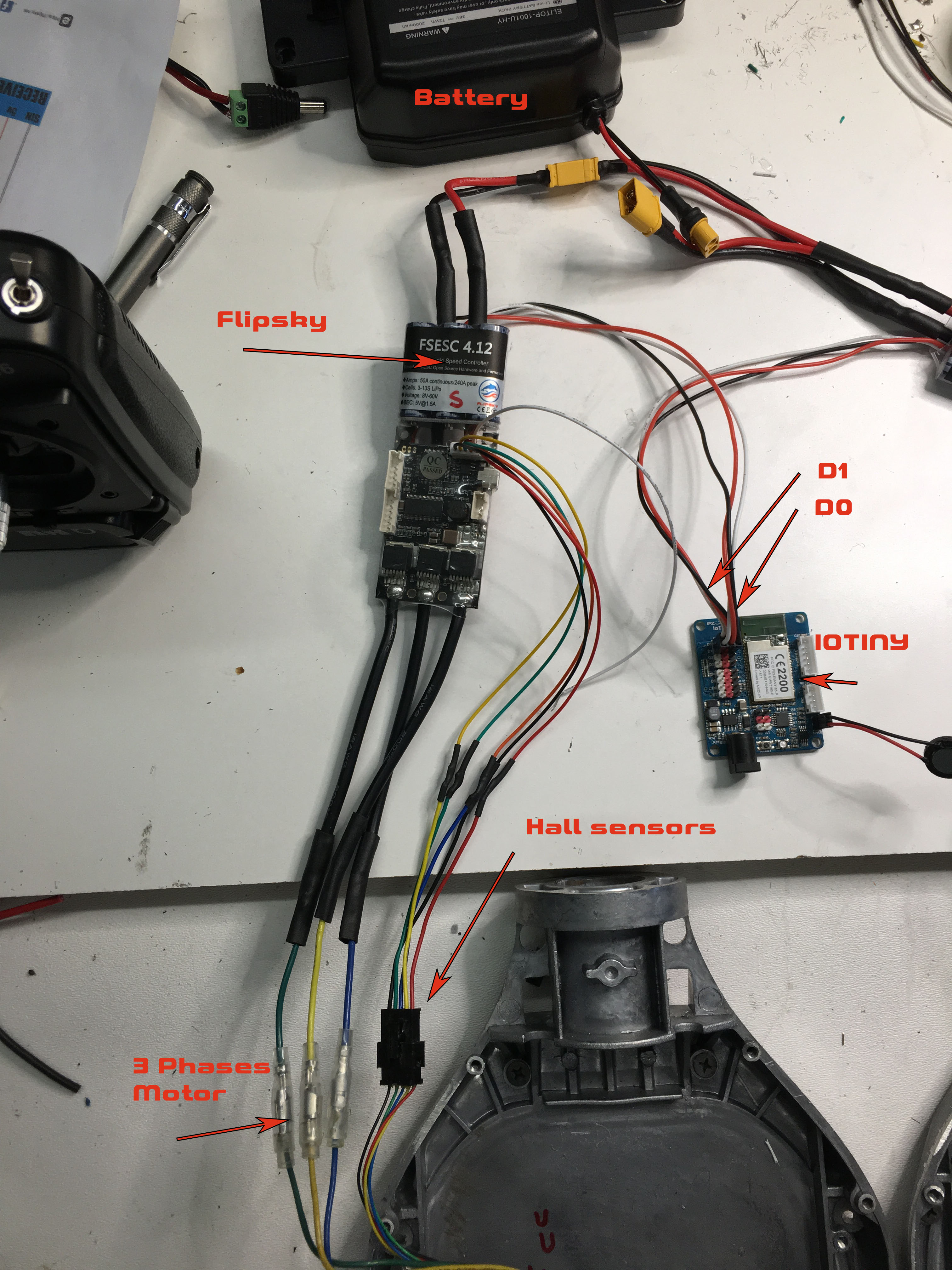
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
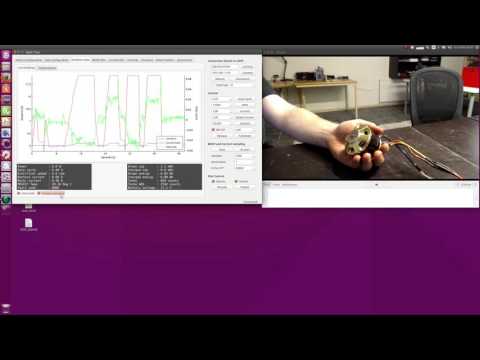
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
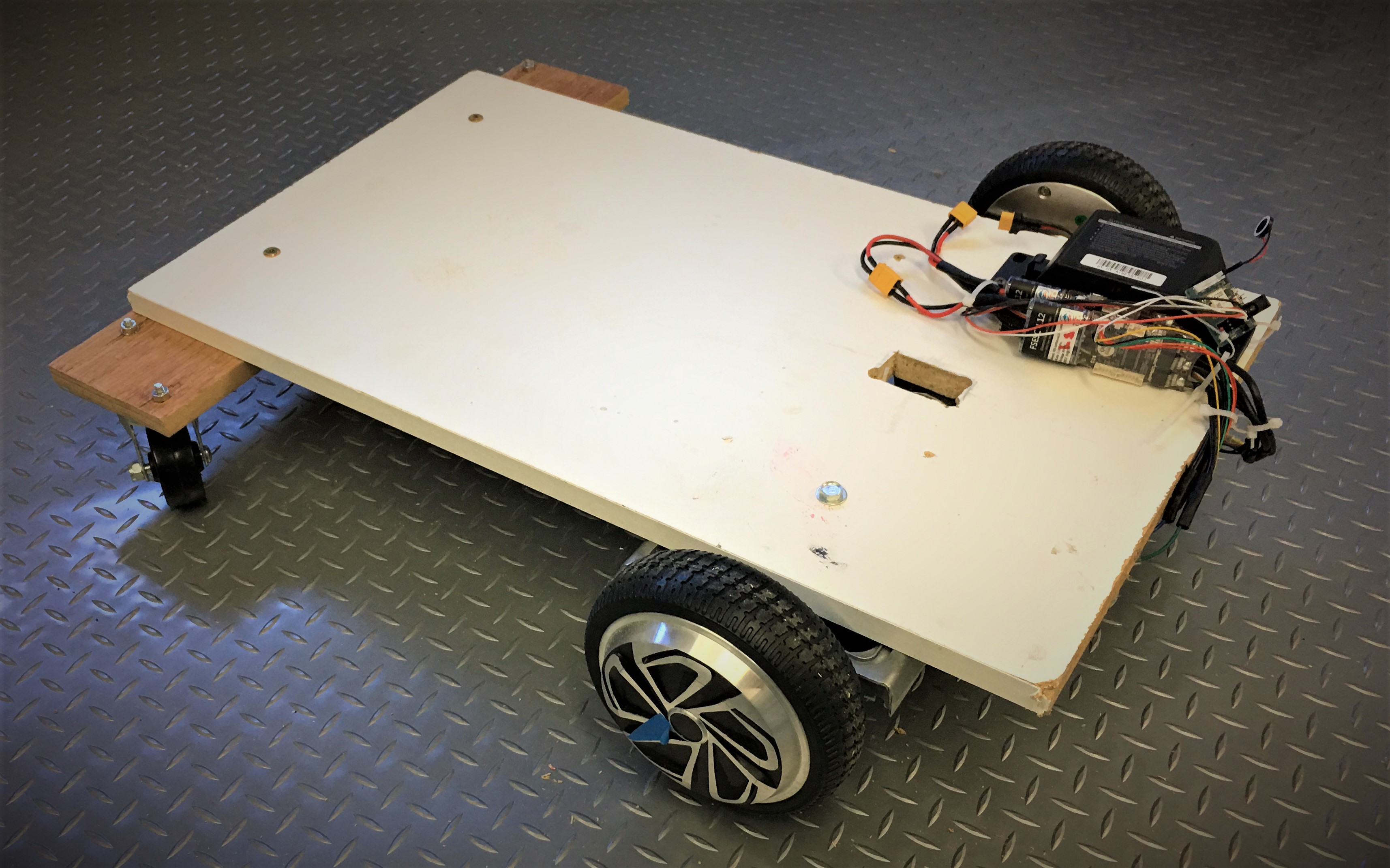
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots
Deleted's Erne - Emotive Robot
Luis's R2d2 Project Ready To Document

Looks great! Much like what we want. Good top speed for a robot.
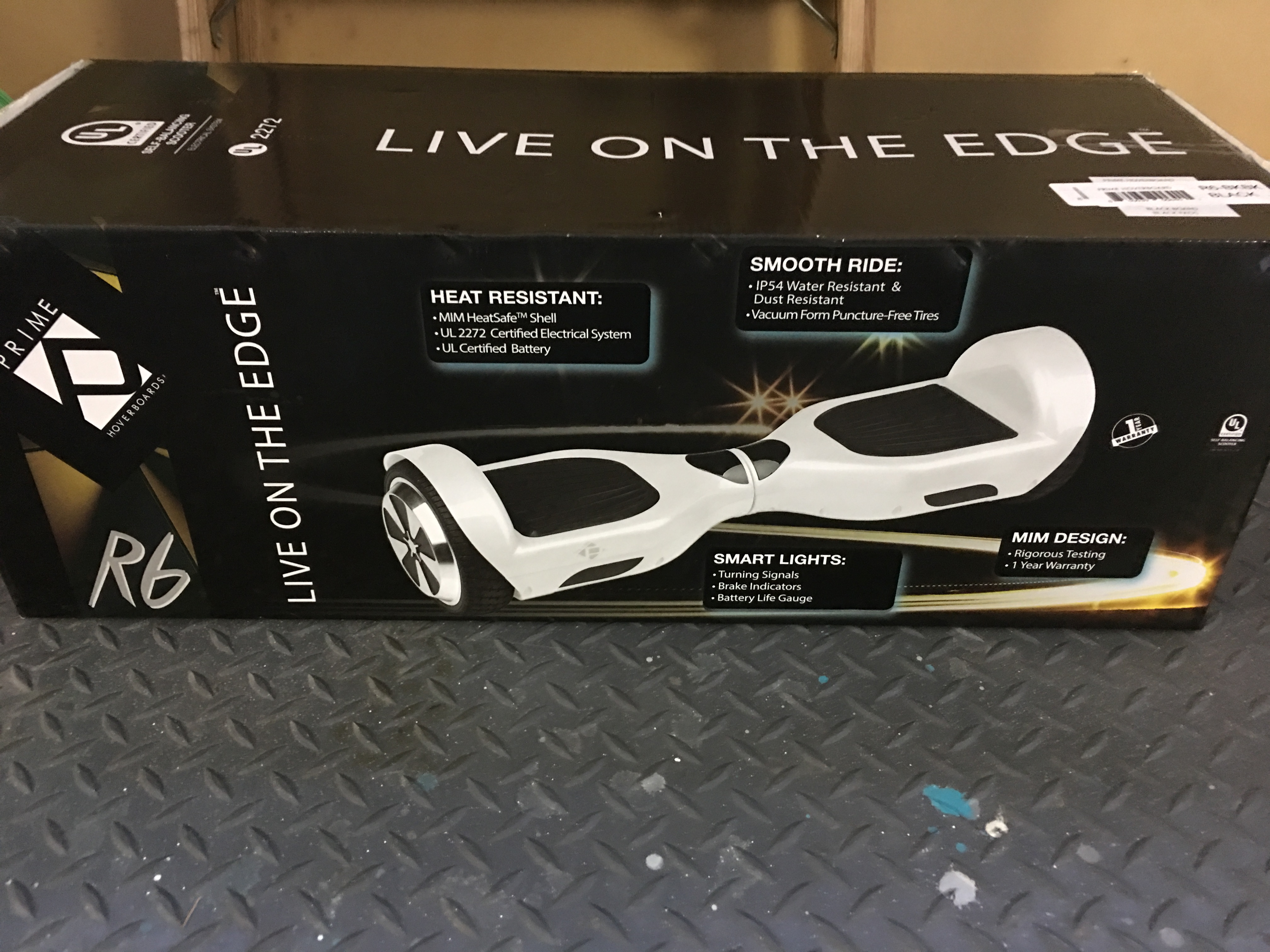
My new hoverboard is here. Tested out well and took a full charge. Cost was $ 109 with free shipping. Capacity 200+ pounds and a 4 amp hour battery. I will start the teardown soon. Next, waiting for Vesc. My test unit will be similar in design to that in the video. I hope we get an update on the EZ nav system soon too.
The morph drive video looks like what we are after. Does it look like he ended up using the extra encoders? I am curious as to weather or not you could cut the speed range down even more? Can't wait for my boards.
Will, Looks good, and been following your posting on this as I'm looking for something similar build for my InMoov. I'm tried of pushing it around on a chair castor wheeled base with a chrome pole up its backside!!
I can't remember, but did you buy a complete hover board and strip out the motors, rather than buy individual hover board motors? Was it cheaper to buy the complete hover board?
Chris.
@andy I'm not sure if the extra encoders were used or not on the morph drive. You have the freedom to use encoders, or hall effects or sensorless on your motors, so Its up to you. I want to get the motors running smooth, quiet and low rpm with torque first. Then if i can nail that down should be able to customize to any project.
@cem Yes I bought a whole hoverboard, because it has everything you need, battery/motors/charger/connectors. I will put up my tear down video on youtube in a day or two. I was going to wait until I had it all going...but prolly should do over several videos.
Progress! I think I changed too many parameters at once, but I started from scratch and re ran the wizards. This time I chose sensorless and chose duty cycle. I get full torque forward and reverse at low and high rpm. It also has mechanical breaking. I used an RC transmitter and ARC and both work perfect.
Only issue now is the bird chirpy high squeal. Not sure if that’s duty cycle or phases are still off?!
edit: found the issue. I had changed motor type to BLDC from FOC. FOC is so much quieter.
So if I remember correctly you can set a speed limit, up and down ramps and brake power. Am I correct? Does the motor shutter when first started at a very slow speed? (Due to sensor less mode). Do we need or want to use the hall sensors for the Nav system if not needed for motor control.
Watching a second time I did see a shutter on starting.
I managed to inch my way along. The whistling is gone now as I set the phases again. Each time it sounds better. The hall sensors are now working. And I have the other wheel working. I think the jerking movement is caused by not having wide enough dead band at stop. If it’s too narrow it wants to float in there. I’ve found speed control and ramps. Easy to adjust.
I have a new issue that wheels will get lost in their signal and jerk crazy, but only sometimes. If I reset and use the signal positions with the rc controller it doesn’t seem to happen.
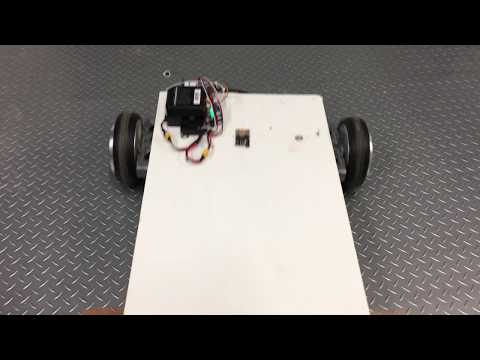
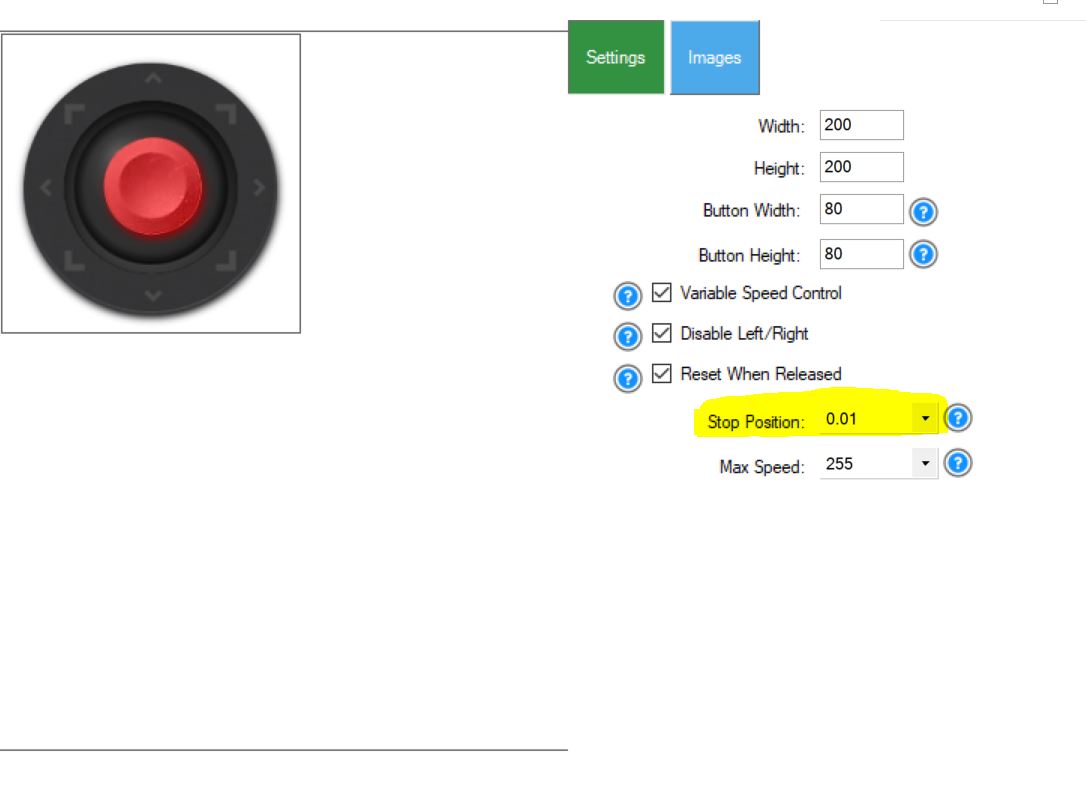
Here is a video of both working in mixed mode ( tank mode) at different speeds using the built in joystick in mobile interface. Still jerky between direction changes but pretty sure it’s that dead band size. ( this is at 50% speed setting).
I need to know the exact max (180) min (1) and stop (90) in hertz frequency for the EZB anyone know? And what is the range for the wi-fi?