
















As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
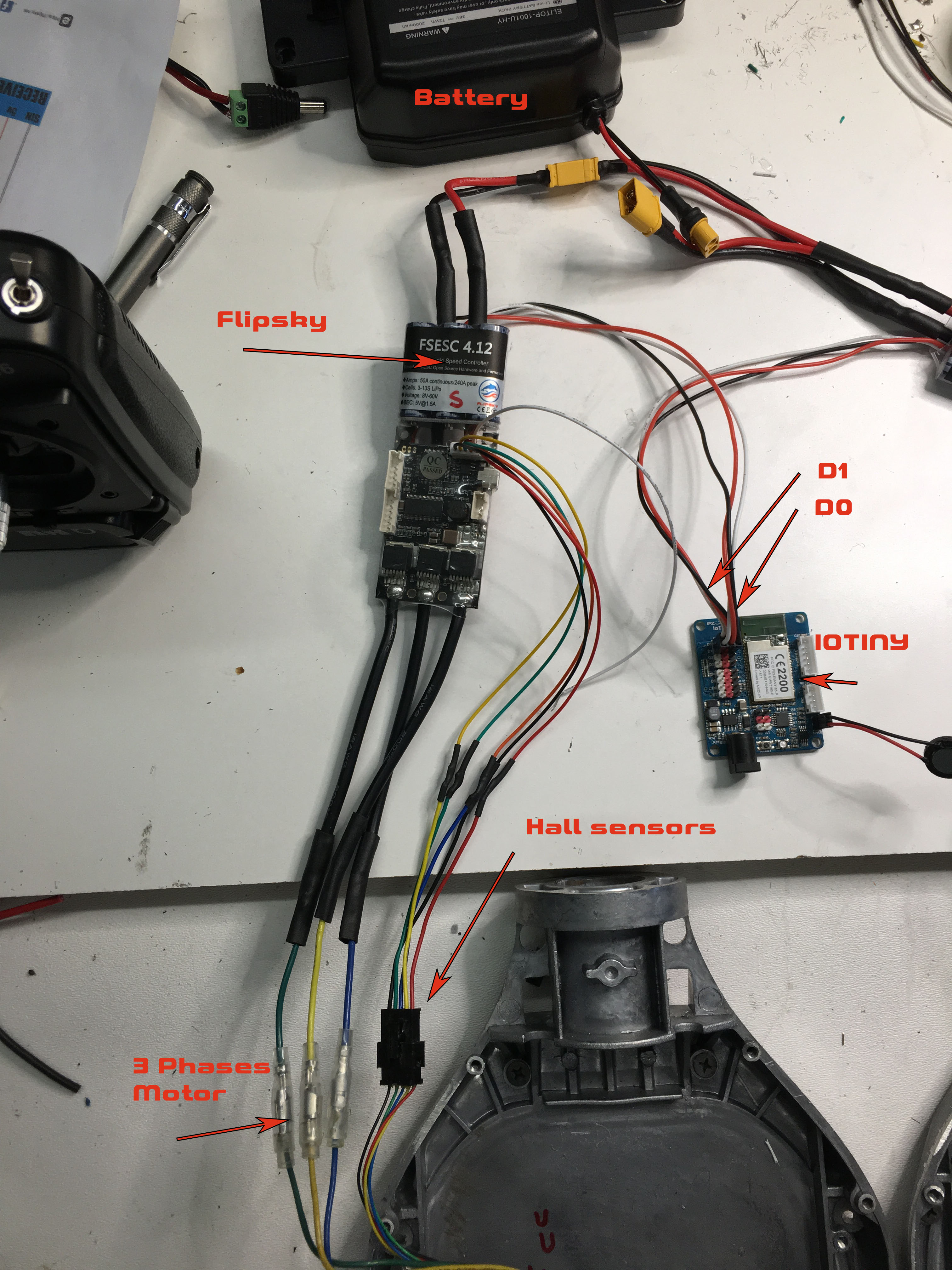
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
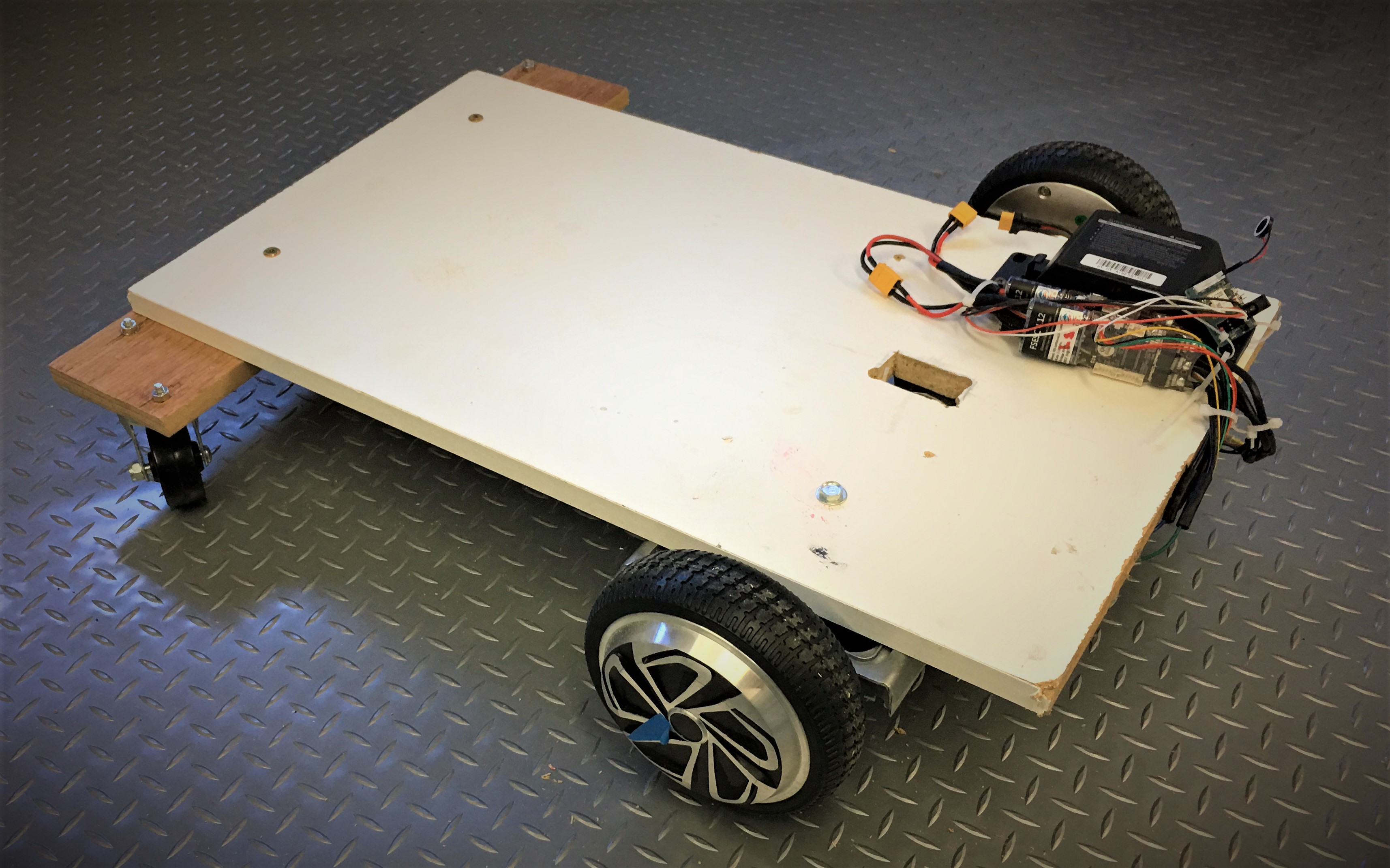
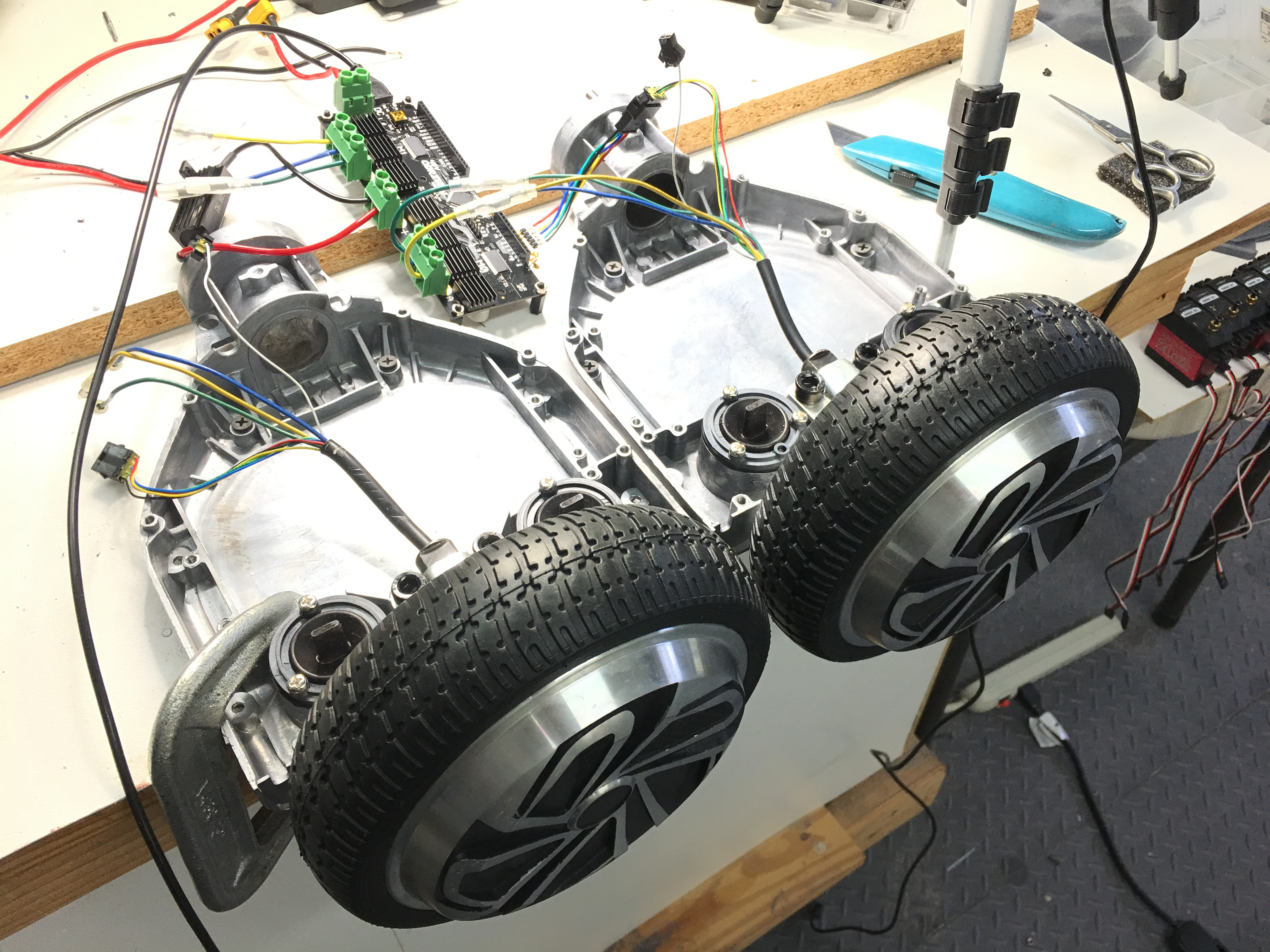
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots

Sulla's R2d2 Bb-8 Mashup Robot Project

Morbeious's My Printer Revolution Six



Well Christmas came early. The controllers from China just got here. Hopefully I can get the wheels rolling before the weekend! Whoo Hoo!Well I have scratched the surface. I've managed to get the wheel a rolling, but I think I might have to work more on tuning the motor. There are alot of bells and whistles in the VESC program. There is enough in the wizard to get you going but then you are kinda on your own as the manual is still in progress.
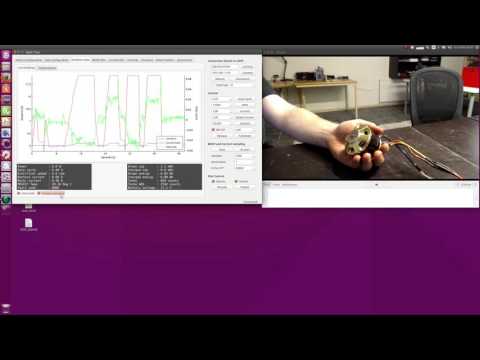
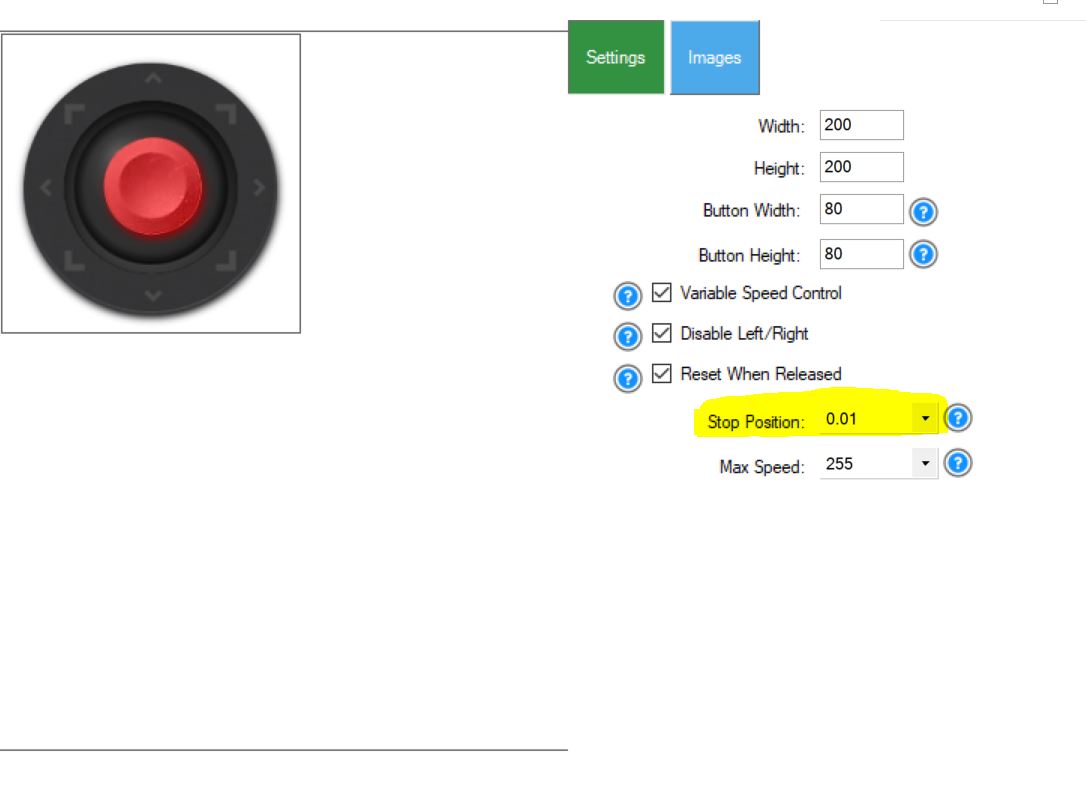
First thoughts. The signal going in to the Flipsky from the IOTiny might not have the resolution that the controller is looking for. The resolution goes into the 4th decimal value. The more resolution the finer the control. Using the mobile joystick has a very small sweet spot to control speed, but mostly goes from full stop to full on in either forward or reverse. In the video you can see I can find that little area..sorta. There is a wizard for the input as well, with alot of choices...so another area to test other settings.
Also motor sounds a little loud and I suspect this have something to do with how the wizard detects and sets up the motor. I think there maybe an area where you can manually add the poles.
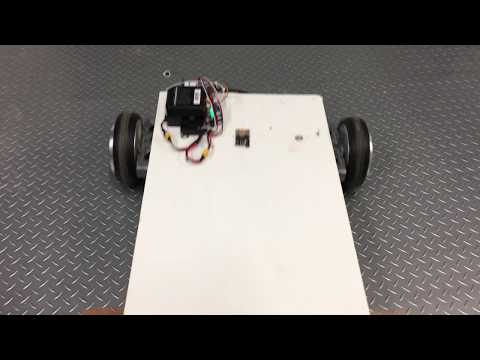
I have something going on this weekend until Tuesday. Then I can keep testing. Until then enjoy this first test.
Much more detailed video coming...this is just to prove its working.
Items: Flipsky controller Hoverboard motors EZ Robots IOTiny Synthiam with mobile interface and joystick controlling in continuous servo mode. VESC 36V battery
Video shows 36V Battery connected to Flipsky and IOTiny connected to PWM with onboard 5 volt regulator (had to disable my battery is low). The hall sensors is connected to the Flipsky as well as the 3 phase connections. Controller is in "current mode", so there is no braking engaged. There is another mode where you can add braking at the cost of no reverse.
Interesting first test. Looks promising. I am sure you played with the original control used in the hoverboard. Does the speed and smoothness seem basically the same as with the vesc? I'm looking forward to receiving my parts so I can play too.
Yes my daughter has one. They are mostly silent and she can move cm at a time on it.
I dont feel like I am getting those types of movements yet. The motor seems a big crunchy on lower RPM. I do know that the phases have been set up correctly. And the Hall effects sensors are working.
After working with the ODrive, I learned a lot obout the importance of poles. In their software there is a place to put the magnets number in, in this case it’s 30 magnets, you divide that by two to get your poles. But in VESC there is not a way to add in this value when using the wizard. So I gotta figure out how to do it manually.
Yeah, it sounds like you're right. The pole settings could be part of the issue. I also wonder if the wave form of the power sent to the motor is choppy due to the current mode setting. Putting it in Regen will be an interesting test. Be Well, catch you next week.
All great suggestions. Looking forward to testing on Tuesday. I forgot there are three wave forms to choose from.... time to start pushing buttons!
I am still waiting for my toys. I need to play too. LOL ! The Brake or Regen mode has no reverse but by using a relay two phase wires can be swapped to change direction. I haven't played with the software yet. Hope to get some time to read up and check out videos.
Also still thinking about suspension. I wonder if an air bag with coil over shock absorbers from an rc buggy would work?
OK Back at it today...found several sources for the info we are looking for including a xml file with some numbers to try in VESC. Here is a video with what can be achievable with VESC and hoverboard motors. This speed was reduced to only 40%. So i think it spreads the PWM over just that 40% giving the ability for smaller incremental moves.