











Day One: The Box
Hello, my name is Peter. I have been playing with robots for some time now. I have owned a few of the WowWee products, including the original Robosapein. I have had Roombas, Wall-Es, Robbies and many other toys. I like experimenting with Arduino circuits and have done a little with the Raspberry Pi. I owned two of the earlier EZ-Bs v.3, the Bluetooth model. Well, now it’s time I came into the revolution.
I plan to be using the Revolution Six. I hope to undergo a continual exploration of all the things I can do with this robot. And, of course report back, so that others can critique and offer comments. I expect to make quite a few mistakes, but I hope to share these, so that others can avoid some of them. I have a lot of ideas to explore. Some will be very serious and some will be very whimsical. My style is more toward exploring and experimenting that completing a finished robot. The Revolution Six is already pretty complete. My style is also very lighthearted.
All too often I see family members spent hundreds of dollars on a robot, put it together, move it across the floor and then put it away in the closet until next summer. Luckily, I get a chance to buy them at the lawn sale.
With this series of posts, I hope to continually inspire you to try new things with your robot, even if it's only for the fun of seeing things move or light up.
Discover more robots
Sudo's Project Shogun

Moviemaker's Sunshine Is Back In Town

Day Two: Assembly
When I first opened the box I thought wow! that's a lot of motors. Note to self: create a list of all the best tutorials and references to servo motors and study them.
Learn > Getting Started > Revolution Six > Making Six Move Learn > Getting Started > Revolution Six > Lever servo Calibration Learn > Getting Started > Revolution Six > Introduction to servo Motors Learn > Getting Started > Activities > servo Control Learn > ARC manual > Servo
Oh, and by the way, begin a notebook of references to things that will be handy, when I'm not online.
At first, I wanted to quickly charge the battery and immediately begin plugging things into the ports, but I resisted. As it was, I didn't pay enough attention to the directions and failed to skip a port between every pair of motors going around the body. Moral, take my time and do it by the book the first time. The Six Getting Started Course (Learn, Getting Started, Revolution Six - all the lessons) is very good. I have already done it twice and will probably do it again after I finish this post. By the way go through the EZ-B v4 course too.
One of the motors didn’t look quite right, during assembly, but straightened out after the first power up. Per the instructions, I took a little spin around the servo Profiles window - just lining legs by sight, not sure what that proved.
Those little black wire harnesses helped prevent excessive visual dizziness.
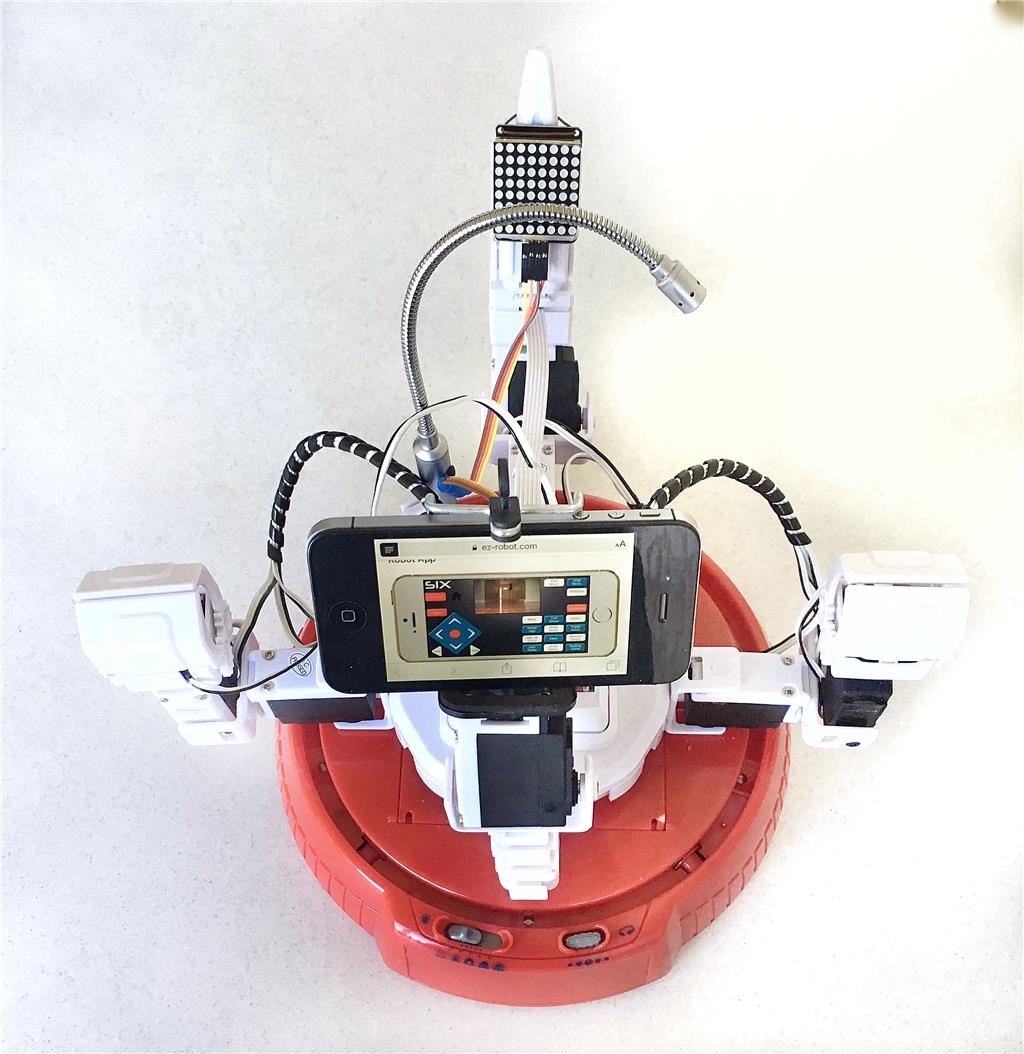
I thought it would be cool to record my own first-time wake sounds to the soundboard, but of course Windows didn’t recognize my microphone - get back to that on another day. For now, we will use "King Kom".
Well, it looks like everything went ok, because it's moving. Here is a video.
Wow that's excellent! Thanks for sharing your positive experience - I really appreciate that. The forum is usually for people complaining. It's great for the team to receive positive feedback
Glad your six is rock'n!
DJ, What is your favorite Robot now?
Darius, Jd is my favorite. Thanks for asking! I have one that has traveled with me around the world over the last year and half. He's actually one of the original prototypes! From Cuba to China to California to my cabin in Ontario and way more places. Don't do what I've done, but my Jd has been in the beach sand, in puddles, in the rain and on a jet ski! I literally bring him everywhere. Never even had a failed servo and still using the same battery. Must have been recharged 1,000 times and still rock'n!
I'm very fond of Jd. And now that RoboScratch works on mobile, it makes him even more fun. Because I can have him sing happy birthday to my friends. Or make little funny skits. Or have him use a fork at a restaurant to feed my friend their meal! I've done hilarious little skits with RoboScratch and Jd.
Sure, it'd be great if he was $8,000 of servos with more articulation, but his $400 of servos adds character and personality .
.
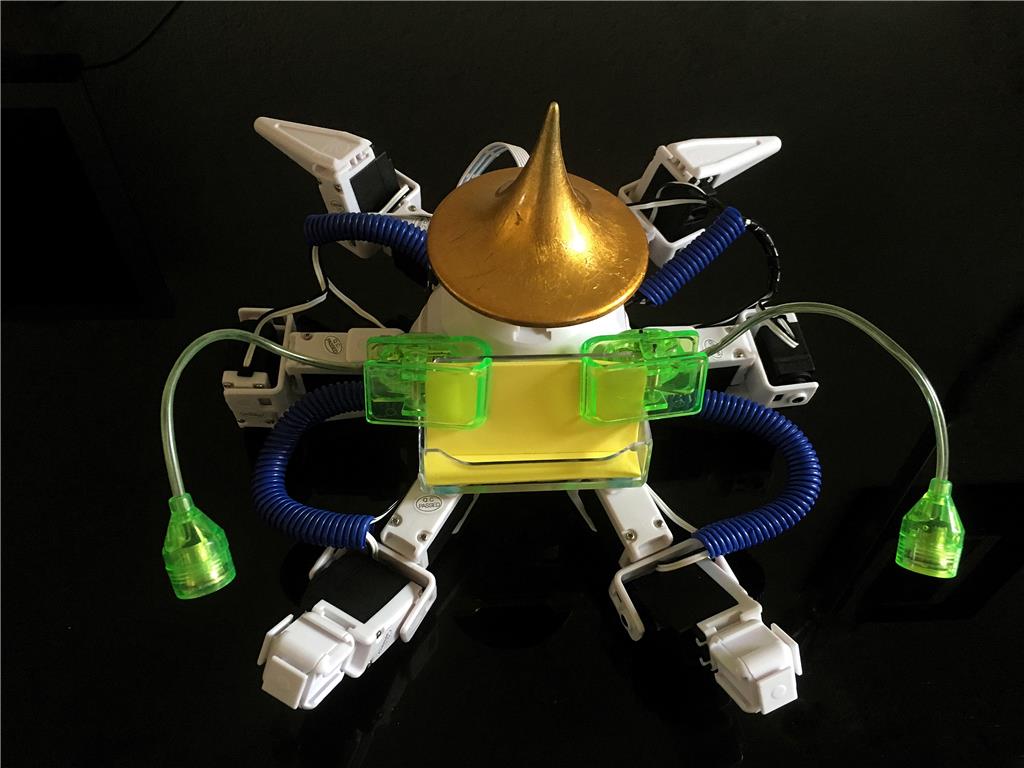
ELECTRO-PLASTIC STEAMPUNK MACHINE - WAIT FOR IT!
Day Three: Motion, Movement, and Motors
OK, ARC has so many ways to control motors my imagination has gone wild. In fact, I think I'll need a spreadsheet to manage all the variations. In the spreadsheet I'll have categories or columns like; one motor, six legs, four legs, two legs, one arm, two arm, multiple arms. And then there's the little motor jobs like rotating, something wiggling, or lifting something up and down.
Perhaps it would be better to think of motor control as a motion control and then we can categorize all the different options.
There are a lot of options for movement and it was overwhelming in the beginning. First I tried the horizontal and vertical servo control to get a feel for the range of the servos. This gives one a feel for where you can go with motion. But then, there is the Auto Positioner control. That name does not do justice to all the things this control can do.
I found playing around, creating new frames (with Real-time Update checked ON) helped me understand where the different servos were located around the Six. It also gave me a sense of how frames, Actions and GAIT related to each other. The Auto Positioner control is great - use it! Create a simple frame and export it. If I understand it correctly (please correct me if I am missing something) this does most of the movement things the basic horizontal and vertical servo controls do, and can continue on with movement creation, all the way through frames and actions to create an entire dance.
I planned to build a library of movements (frames and actions), but I think much of this has already been done. I simply need to explore all the frames in all the various saved robot projects - the wheel may have already been invented. Many of these movements have already been created, I just have to find them. I suppose there is no need to limit my actions simply to the Six. Why not borrowed (import) them from some of the other robot projects?
That's just the beginning. What about continuous servos, stepper motors, and simple DC motors? And finally there are all the other controls that include motor movement as part of their process, e.g. speech, joystick camera, etc.
Here is my simple frame experiment created using the Auto Positioner control:
Love the message in the video! Super awesome.
Have you started with the original Six project? And began modifying it?
The Auto Position does control the servos similar to the vertical/horizontal but it also has a lot of math in the background. The transition between "frames" uses interpolation and quantization. It ensures that the position of each servo arrives at their destination position at the same time. This is why the movements can be used for gait creation.
DJ, yes I did start with the original Six project. I will be going back to it off and on. I see many other things, there to experiment with and explore.