



As I said before, I've been working on a 24 DOF humanoid robot (what i believe to be the most DOF in a EZ-Robot humanoid) and I finally have a good camera to show him off! As you can see, his two wrist microservos are currently off. (I'm waiting for my threadlocker to glue/bolt these on) and as is his head (it hasn't come yet, same as the EZ-B v4)
All I need now is to extend the leg cables and get a bigger battery, glue the head and hands/wrists on, and he's ready!
Feel free to comment, if you have any suggestions, tell me!
(P.S, this IS a custom robot. This is not a standard Robotis robot.)
also, the pictures were taken later at night, so please excuse the darkness.




CURRENT OVERALL TOTAL (USD) : 1200 (about)
By Sudo the Banned
— Last update
Discover more robots
DJ's The Real Wall-E
Real-life Wall-E built with EZ-B Robot Kit uses camera, servos and voice to track motion, color and faces and react with...

Doombot's Droid In Progress
R0-F6 droid: R0 dome on R7 body, 2 drive motors, dome motor, 2 holoprojector servos, app-controlled, BeeBot sounds,...
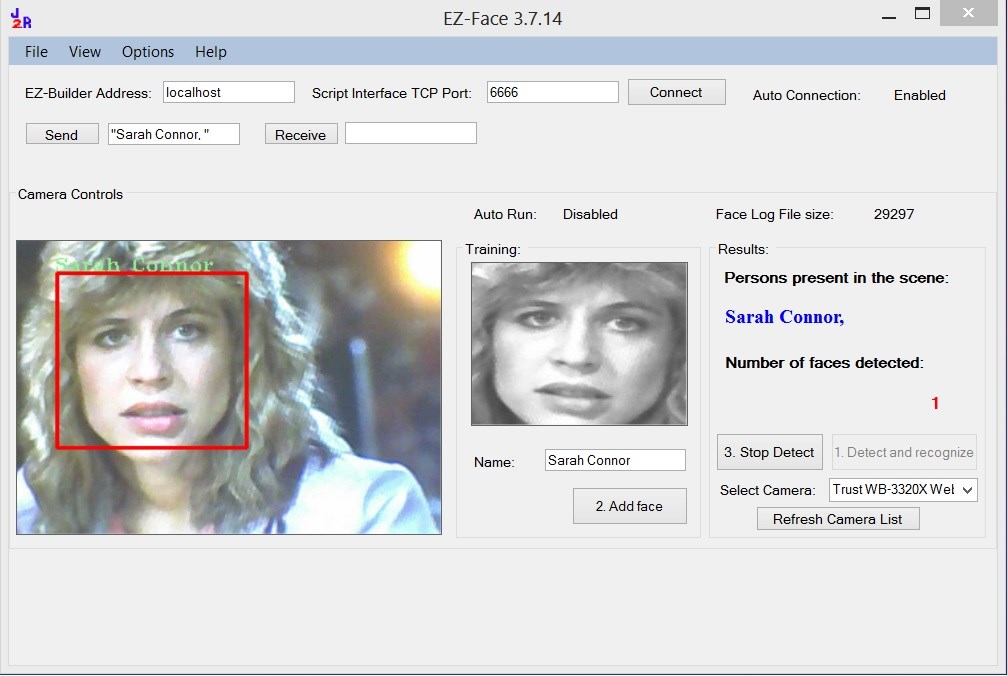
Justinratliff's Ez-Face
EZ-Face: standalone C# app using EmguCV for multi-face recognition with trainable names; integrates with Synthiam ARC...

oh.this is good learning stuff.thanks
Besides being able to daisy chain the servos for easy wiring, the AX-12A has a built-in microcontroller which allows feedback to a controller to track its speed, temperature, shaft position, voltage, and load. All of the sensor management and position control can be handled by the servo. The EZ-B does not read this feedback which can be very important when getting a humanoid robot to perform. Kind of defeats the propose of paying a premium price to use a DYNAMIXEL servo. Correct if I am wrong.
i agree.for excample you make an walking patern.if you cant see the when the servo is overheating. you will burn many servo's.
The EZ-B can actually read that info, you just need a custom script. I think DJ is working on is a built in function in ARC that reads the temperature and such, if I remember correctly.
I hope he gets that working. My Bioloid wants an EZ-B for Christmas or New Years.
It'll depend how the data is presented back to the EZ-B. If it's serial data then it can't be read with the V3 but the V4 should be able to get it. If it's analogue data (i.e. a voltage between 0 and 5v) then you can use the ADC ports to read it. If it is I2C then it can all be read through the I2C port of the EZ-B.
Having said that, why would a servo over heat or become stressed if it has been sized accordingly? I've been designing and working on a biped humanoid robot for around 6 months now and so far have had no requirement to use anything above heavy duty servos running on 6v (just under 10kg/cm torque) based on my calculations.
I just got the hands on the robot - I've also modified the chest a bit to make it heavier up front for when his backpack is hooked up (so far it's a 3/4 pound backpack) so it's equal on both sides. I got my big gaming rig up and running, (which has also taken up my workspace, so i've had to use one of those little TV dinner tables for the time being) and I'm setting up my ARC for everything that I hope to do with this little guy.
Photos/videos to come soon.
Also, does moving a servo when it's off affect the performance? I've already bumped and displaced his legs multiple times while he was off, but it seems to have done nothing. I've had bad past experiences (mainly with a i-sobot) when i've moved a servo while it's off. Thanks!