






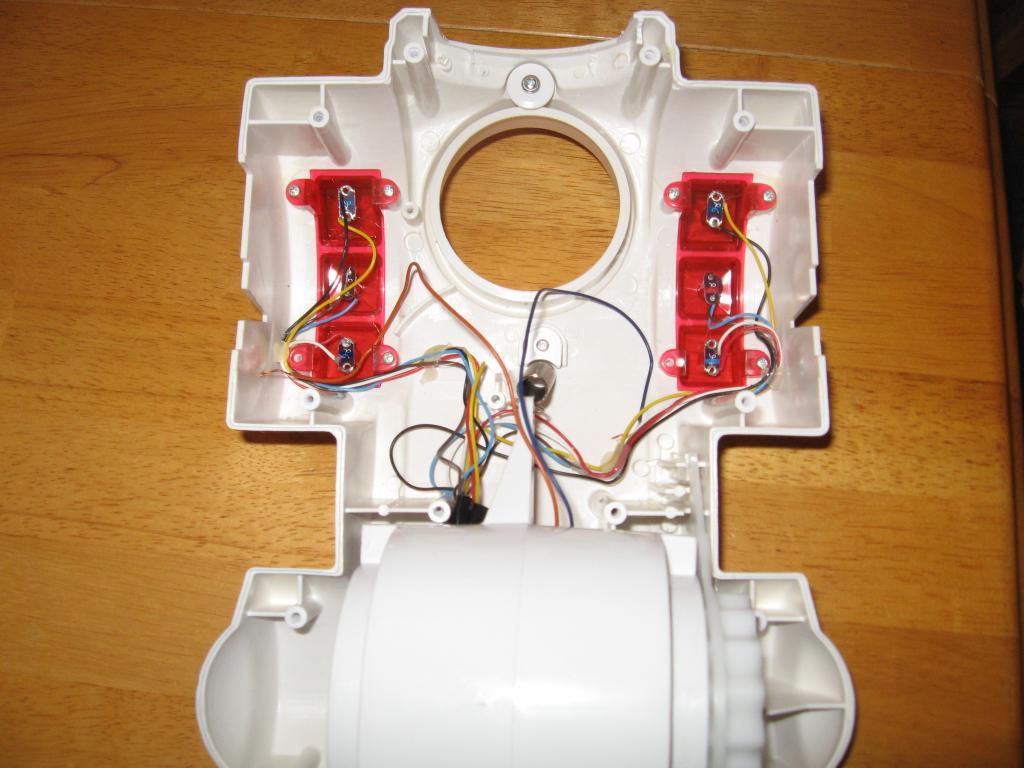




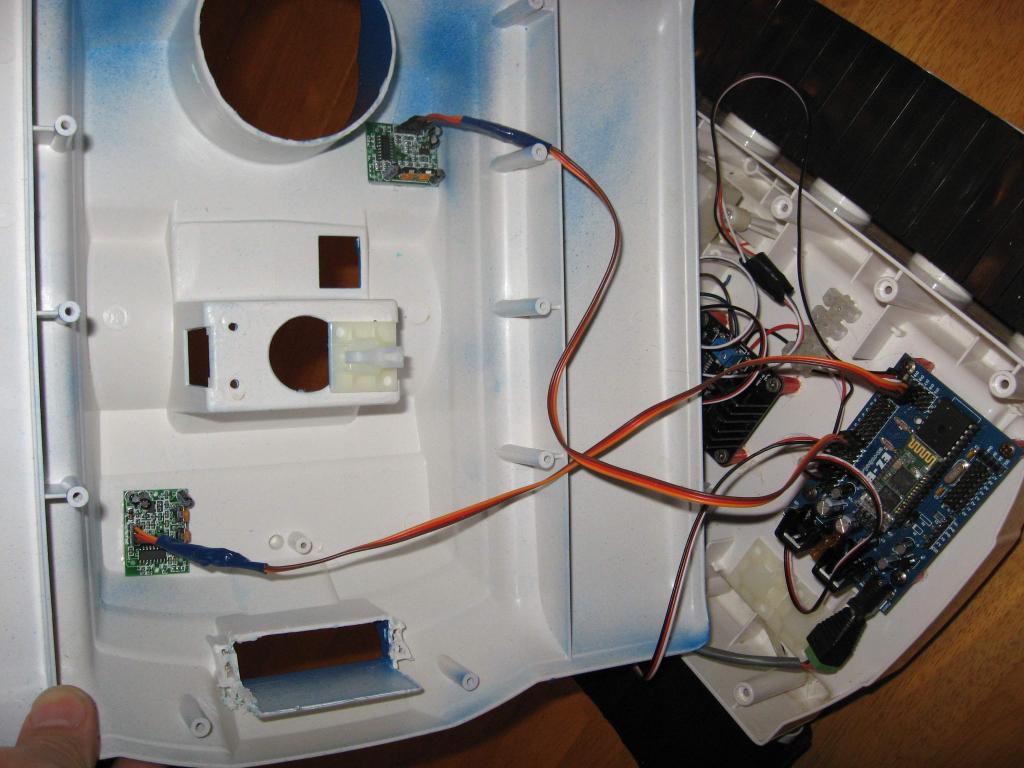


Hey all. I was really excited when my EZ-B arrived about a week ago. While it was on its way I was searching around for my first project. Thanks to DJ's great website and Ebay I found what I wanted. I picked up a RAD 2.0 for 15 bucks. It did not have any remote or battery charger (so what). And today I started on it! I hope to post my progress here and open to any ideas you all might have. As you can see I wasted no time before I opened it up!
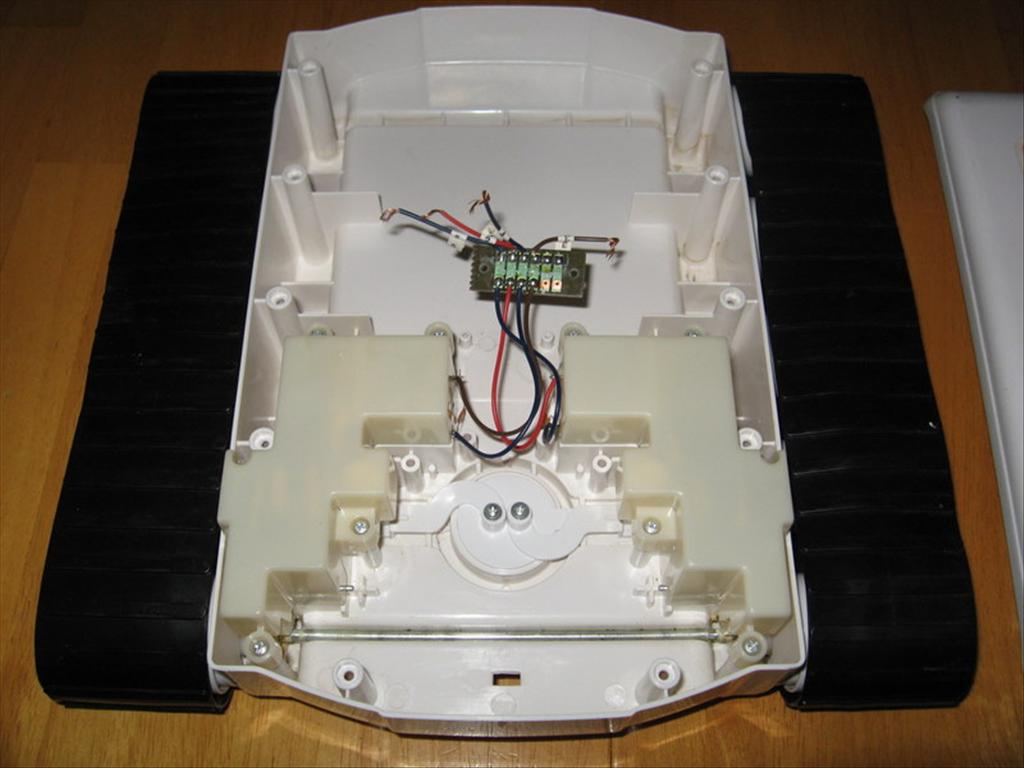
The RAD 2.0 has what looks like a decent track base with motors and gear boxes (a bit loud when I tried out the motors). It has a physical gearbox selector switch for High and Low gearing (I will need to put a servo on that) which will be cool to mess with. The interesting thing about this guy is that he bends at the waist. He also has two arms that work together to grasp an object. It looks like can bend all the way over and pick up an object on the floor (we shall see). After opening it up I noticed it appears to be a decent thing to start modding.
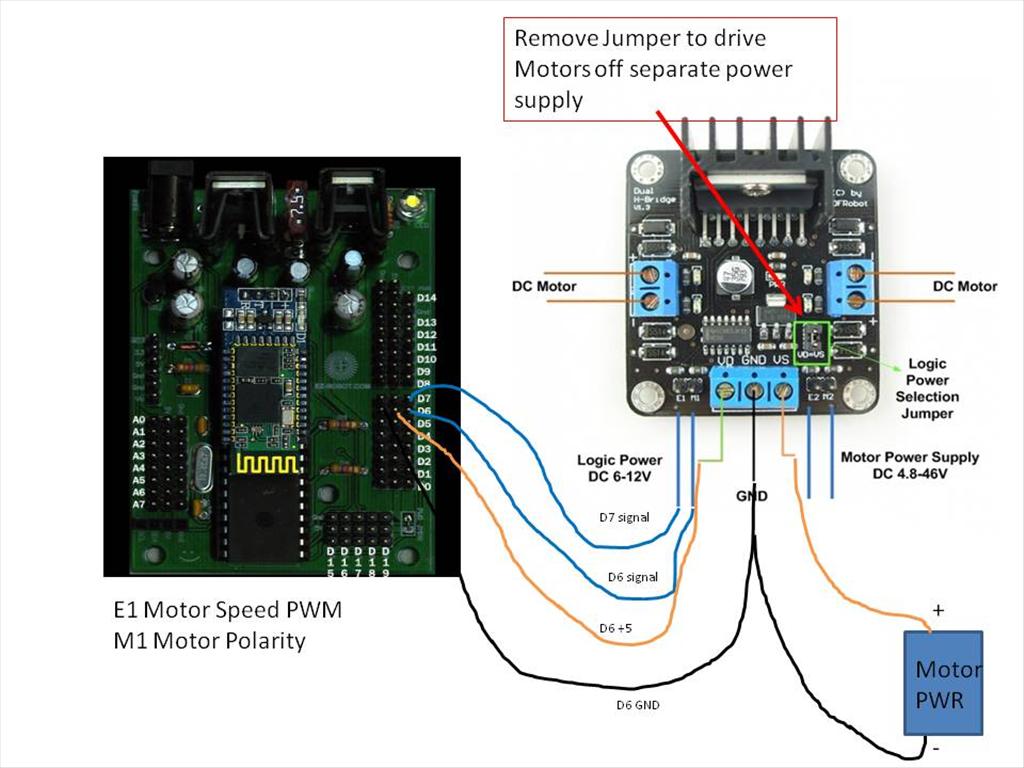
I have an H bridge on the way for the track motors and I probably going to need another if I want to use the existing motors that control the waist and arm movements. I am thinking of putting in a accelerometer as well so when the bot goes up or down hills it could stabilize itself automatically! It will surely have a distance sensor...just not sure where to put it yet, camera, and probably go with an MP3 trigger. You may notice the circle on his chest...The original toy was remote control and could fire nerflike darts (pretty neat). Not sure I will keep that functionality as I am thinking of other cool gadgets to hook up to him. Tonight I tackled the head movement.....I will post more on that later.....
Kevin




Discover more robots
Buratino's Basilio

DJ's The Real Wall-E

What can I say, I am super excited about this stuff! Thanks to having a bunch of young boys with lots of legos and kinex around and the handy dandy hot glue gun, I already worked up a possible solution for the head movement. Once I figure out how to get vids up on YouTube, I will post the video. In the meantime...here are some pictures of how I connected up a servo to the head.
Welcome kkeast,
Pretty cool bot for your first project, I also won on ebay a Rad Robot v1.0 for $20.00 but the owner sent it to the wrong address and never got it back so I got refunded. Just my luck...lol
I was just wondering if your going to add anything new to the Rad Robot like a camera, sensors, audio or new movement like head tilt or turning?
from the pics I see, good job so far, keep up the good work
Hi There, bummer about your RAD. Hope you score one soon! You bet I am going to add stuff. Camera (probably go with one of DJ's if he gets some more in), sensors (ping sensor....not sure where I am going to put it yet). New movement..YES....In fact...check out what I did this evening.....
Kevin
Wow. That is looking pretty awesome and in such a short time. Can't wait to see what you will have next
Dude very cool! I like that platform a lot.
Love the Robot! those cool track base and nerf gun make it look like it could be something from termintaor hehe if DJ keeps addings more and more awesome functions to EZ and maybe one day makes it able to run without need of laptop to might find my self calling it Skynet instead
hehe if DJ keeps addings more and more awesome functions to EZ and maybe one day makes it able to run without need of laptop to might find my self calling it Skynet instead has become self aware!
has become self aware!
Look forward to seeing what you do with it!
How are you going to do the arms and bending at the waist?
Hey jamerperson. Great question! I don't know yet. I think I am going to use the original motors and hook them up to an H Bridge to start. I really like the idea of being able to have the bot bend at the waist and pick stuff up. I am considering modifying the end of the arm with a caliper grip. Right now I am focusing on the Radar. I am figuring out that the factory installed lights were bulbs. Those will have to be replaced by LEDs. More pictures and vids to come.