





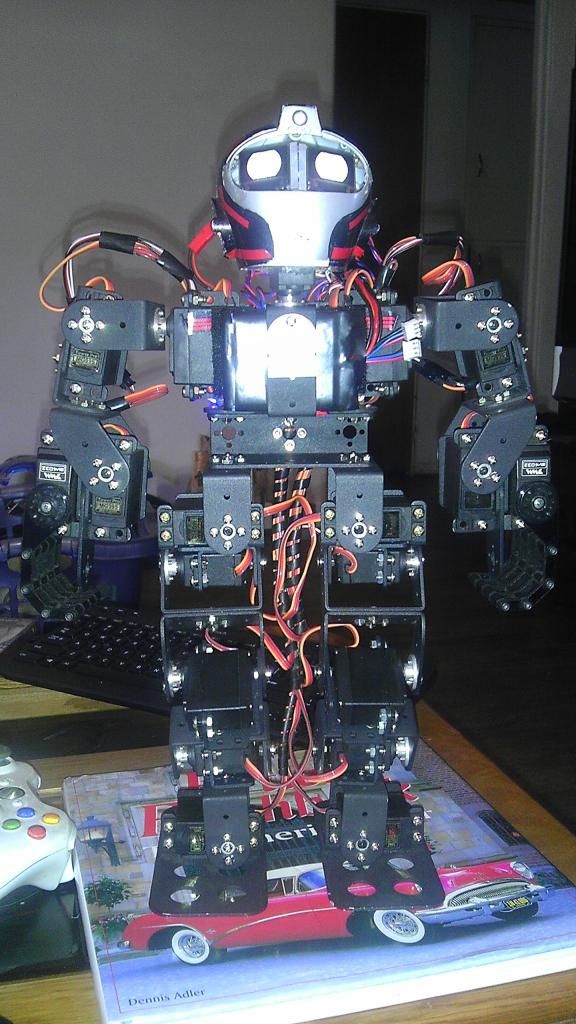






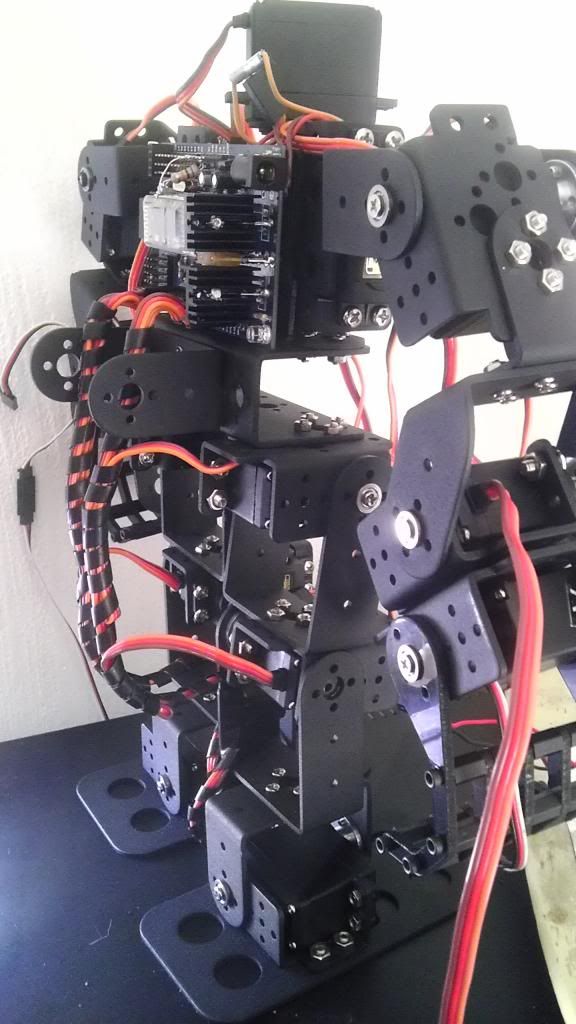
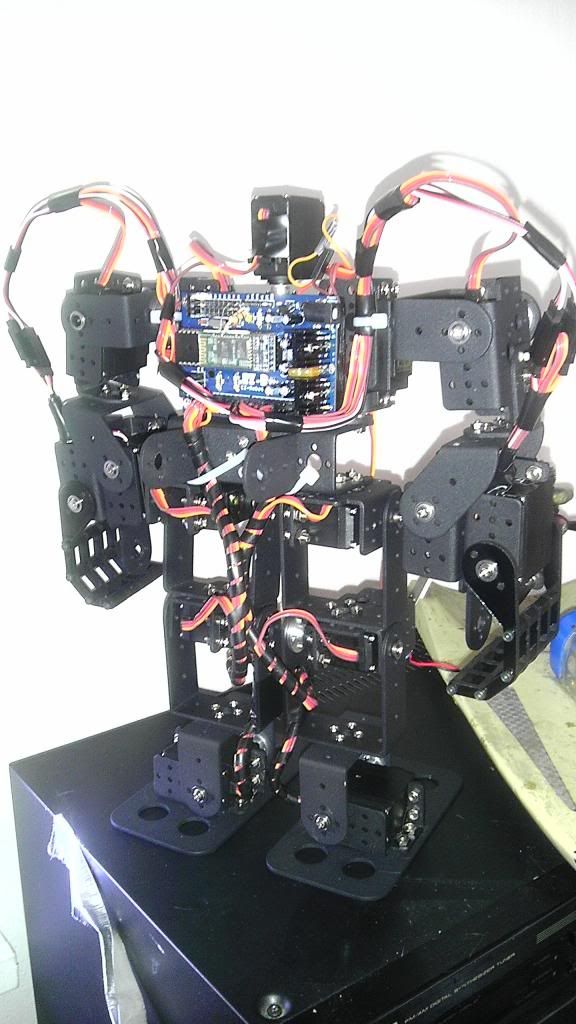
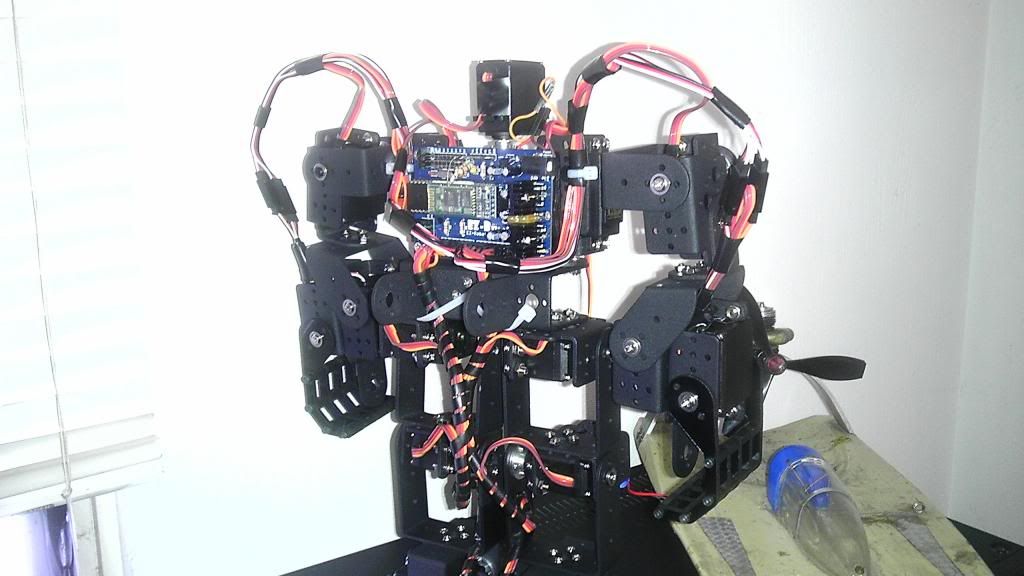
Hey everybody, its been awhile since I built a bot, and I'm back to humanoids again lol. This is a cheap 15 DOF robot kit that I found on ebay. All the kit included was powdercoated aluminum brackets, screws, and those awesome aluminum servo horns. No instructions. So, I kinda built it my own way, with a layout similar to JD. I used MG995 servos because theyre cheap, metal geared, and (supposedly) 208 oz/in of torque. only the head servo gets its power from the EZ-B, all the rest get power from a Castle Creations 10 amp regulator. It's not enough. From what I read, these servos draw 2 amps each...gonna add more regulators later. Ok, enough chit chat, watch the video and lookit the pics!





By Kenny Storm
— Last update
Discover more robots

Khanflicks's Super Mario Humanoid Project
Convert a Mario toy into a humanoid with servos and JD legs; troubleshooting loose servo fittings and phone connectivity...

Rob-Bot's My 1St Life Size Robot Build
Rob-bot life-size custom robot, battery-powered 6ft with heavy-duty servos, HD night-vision eyes, synced LED mouth &...

Tfitzrandolph's Custom Robot Build Wobble Frog
Wobble Frog robot toy built with EZ-Robot IoTiny, LIPO and 270 servos, controlled via Synthiam ARC scripting to create...

Thanks for sharing. Great job putting it together.
:)

 j
j
That's a lot of servo commands to get actual walking movements. Very good build and wiring harnesses also.
Thanks, both of ya:) I try to keep a clean build, I dont like having to rifle thru a mess of wire when I inevitably have problems lol. The walking movements look complicated, but its only 4 frames in autoposition. I suppose the swinging arms aren't necessary, but the weight transfer of those heavy hands make it walk better:) Like JD, there's only six servos total for the legs as opposed to my old robophilo's six per leg. The philo was waaay complicated to make walking movements, especially because the servo's calibration point would change as I was using it due to the ultra cheap servos. It didnt help that they regularly got bottomed out, which DJ has proven is really tough on servos...Look real close, 3 of those cheap servos made their way into this robot's hands lol. Honestly, I'm having more fun with this than I did with the philo lol...and building this was about $100 cheaper:)
Oh, and one more thing, I need name suggestions for this guy, I can't come up with anything good lol
I might get JD first
I was gonna do the same, but my impatience took over lol. Couldn't wait. Well, that and this aluminum kit is bigger, stronger and cheaper (albeit heavier) than jd's extruded plastic. I'm always on a tight budgie, its one of the many joys of being employed full time in the "working poor" class. I'm still gonna order JD's head for this though...I wonder if DJ can print the head in black instead of white lol
Ya, that head might stand out, lol.