





























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots

Rb550f's Android Palbot
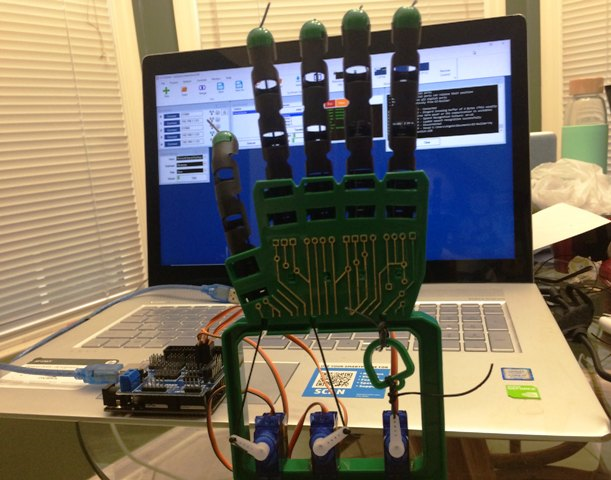
Ezang's Here Is A Picture Of The Hand I Am Practicing With


I guess the SLA I used to test the arm with is going flat (I've never charged it since I bought it and played with the Omnibot I bought it for for a few hours so I am not surprised) as I just hooked the LiPo up to the EZB for another quick test and it moved much better, although will still be upgrading the servo on the top of the arm and running a separate 6v supply to the arm servos.
Now to figure out how to fix the servo horn to the top of the arm as hot glue wasn't man enough for the job. Also need to cut out the old battery compartment in the back as it's not being used now, make and fit some brackets in the robot for the hbridge board, ezb and something to keep the servo wires away from the wheels, cut out for the sensors on the front... So plenty to get on with while I wait for the heavier duty servos to turn up. I may even take another look at the neck and see if I can shorten it (although it's grown on me despite it not looking 100% correct)
sounds like good progress
A small update;
The battery compartment has now been removed (what a horrible job that was to remove whilst keeping the back door usable) and the front is filled with some Jervis plastic card ready to be cut out for the LCD display, volt meters (yes plural, one for each cell), IR and Ultra Sonic sensors.
The arms are still being worked on, a lot of milliput has been used in small doses to build a nice surround for the servo to keep it in there nicely without having to have screws and bolts holding it there from the outside. Although I am having issues connecting the arm to the servo still as the existing support with the horn milliputted to the end is long and the tiny screw seems stuck in there at a funny angle and wont budge (but it will do when I get the drill in there again!)
I've also taken the advice of using 6v direct to the servos for the arms, elbows and hands. I ordered a lipo regulator (Etronix LiPo Regulator 6.0V 5A) which is supposed to be used to connect a lipo to a 6v receiver but as long as 7.4v goes in and 6v comes out I don't care what it's supposed to do. but there is no indication of which way round it goes in the circuit (i.e. no label for supply and load) - anyone have any ideas? It has JST connections (male one end, female the other)? Or am I going to have to try it one way and see if it works and turn it round if it doesn't?
It's all getting there but has slowed down with me being back at work as of this week and having a lot of my own work to do when I get home too (both self employed and employed full time to fund the robot habit but it loses me a lot of time to play!)
Oh, and I almost forgot one of the best things I have done, which is to have ARC interact with my home automation via EventGhost... We have all seen DJs Omnibot watching TV I expect, mine can choose what he wants to watch or listen to (on XBMC)... I'll go in to more detail when I have more time as it's not a simple set up at all (uses a Windows PC, a Ubuntu PC, web server, PHP scripts, EventGhost, XBMC and probably more that I've forgotten about)... But basically, I could have my robot be doing his own thing, exploring or whatever and when he "walks" (or rolls) in to the living room he could stop what I'm watching, throw on his favourite song and start dancing Now that's something you can't do with just any old controller... I have an idea for a video now too but the robot needs finishing first...
Now that's something you can't do with just any old controller... I have an idea for a video now too but the robot needs finishing first...
My door on my omnibot comes of easy with the right tool I really like EVENTGHOST MY whole house uses automation,every outlet,every light,plus A/C control.pool and spa control ,alarm and more mostly use X10 modules,
Another item you may look into if you dont have already is USB-UIRT it uses EVENTGHOST to control everything IR (stereo's and tv's and more) and with a IR REPEATER system only need one IR SENDER and then emitters on each item to be controlled
ALSO one of my robot uses USB-UIRT module controlled by a AI software
THESE are ideas you may like or dont like
ON the LI-PO regulator, the way i think it works its a step-down to a step-up dc converter or step-up to regulated 6 volts output.
I opened up the regulator but couldn't follow the circuit board, it'll work for any source so I'll throw it on a 9v battery to test it, it'll save setting the lipo on fire or anything stupid like that. Basically in there is a coil, an IC, some resistors and a capacitor - nothing too complicated.
I looked in to IR through EventGhost but most of my stuff is RF controlled anyway (via EventGhost) or has an API for network control and what is IR controlled never gets touched anyway other than the TV power. It's tempting to throw in an IR repeater for those IR controlled devices (basically TVs and amplifier) but it's not worth the cost (both financial cost and the cost of building it all in to the fabric of the house and making it invisible - there's no way in hell I'm chasing out brick walls and replastering again!) but that's on the digital house (not home automation, it's specifically not completely automatic) side of things not the robot (I need to remember this robot is just a pet and nothing more).
here is info on USB-UIRT with EVENTGHOST
USB-UIRT THERE are wireless IR repeaters Thats funny a robot PET mine is my helper,my friend and more working on a design (almost done) to fetch a beer,but since not EZB related cant post it
I agree robotmaker"mine is my helper,my friend and more" since watching bicentennial man (1999) for the first time.