





























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots
DJ's Robot Head

Zxen's Robomannequin


I have an external power board which I knocked up for the arm servos to supply 6v (fed from a 6v regulator), I've been meaning to re-do the board as it's a bit rough and ready so when I do I'll make it bigger and allow for all servos not just the arm servos.
Thanks for the help.
@Rich he makes a good point a quality lipo pack can handle 20 to 30 amps no problem , what battery are you using? And is the gauge wire big enough to feed everything at once without a voltage drop?
It's a Turnigy 5000mAh 2S LiPo, ROAR approved. 30-40c. I'll check the wire gauge, it's not as big as what comes off of the battery but it's not like a cat's whisker. Parts of it are from pre-made JST cables since everything is modular and can be removed. I might look into using some bullet connections and increasing the cable size then.
It's an odd one as I know it shouldn't be the battery, I got the biggest and best I could find when I ordered it/them.
That's a couple of things I can look at changing anyway to see if it solves it. And what would a project be without it's problems
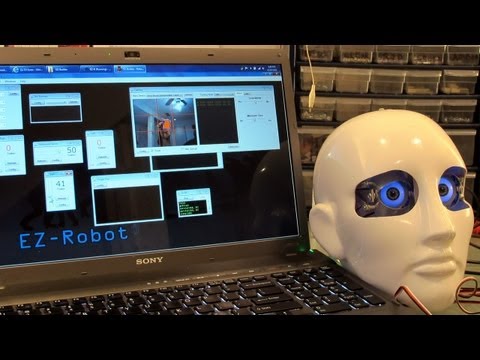
Just done some fault finding and it seems like the LCD only cuts out when both the pan and tilt servo are in use, if only one is set in tracking it's fine. However, when one is moved you can see the display flickering... It all points towards the power, which is something at least.
So with that said, I think I will be doing both of what's suggested - Moving the servos to the 6V power board and upgrading the wire feeding everything, hopefully that'll solve it.
The servos are high torque servos so I'm guessing they draw a lot of power. The pan servo could be downgraded I expect since it holds no weight but not sure about the tilt, and to be honest I'd rather not have to take the neck apart again anyway so 6V external power is going to be the better option.
The smaller servo moving the eyes is fine, as is the TIP122 which powers the motor for closing the eyes. Neither of which use that much current.
I haven't checked the HBridge yet, since it's powered from the 6V board I assume it'll be fine but I guess I should check it... when I have more time.
Rich, if you are using 6V servos then the external regulator is the way to go, which 6V reg are you using?
On the EZ1 we are using mega torque servos (40Kg.cm) at 7.2 volt and they are fed by a 7V2 battery pack, so we have the issue of high (when fully charged) battery terminal voltage that is above the servos ratings.
I use the Etronix Li-Po Regulator 5A 6V which is good for up to 5A (obviously). If I'm running all servos and the motors from it I'll probably end up using 2 of them.
Wiring from the battery:
If the robot is pulling 10 amps for example, then it's good to have wire that can handle say 15-20 amps. Just because a lipo battery has a 5- 40 amp rating (for example), it doesn't mean that the robot will ever draw that from the battery, so you can down size the wire unless the wire was an extreme length.
Yeah, I never gave the wiring much thought to be honest, I should have since I am technically an electrician (one of the many strings on my bow - it looks more like a harp than a bow now).
I will be getting the biggest gauge wire I can get hold of (within reason) and rewiring from the battery to the EZ-B and to the 6V regulator. At least that will eliminate the wiring as a problem.
The servos in the neck are Tower Pro MG995s so 350mA with no load (I have the same for the arms too). It shouldn't be more than 1A total drain when in use, would that be enough to brown out the EZ-B/LCD? If not (and I suspect not, if memory serves me correctly it can handle 5A on the I/O regulator) then it points to the wiring.