



















Project:
By request, my 6 year old son wanted me to design and build him a Hexapod. So I started to whip up some designs in Zbrush and together we decided what he would look like. "Main thing he has to have dad, is an arm cannon!" So we got that. Then I thought it would be cool to have a robot kinda part of or riding the hexapod. So kinda a centaur bug/robot thingy.
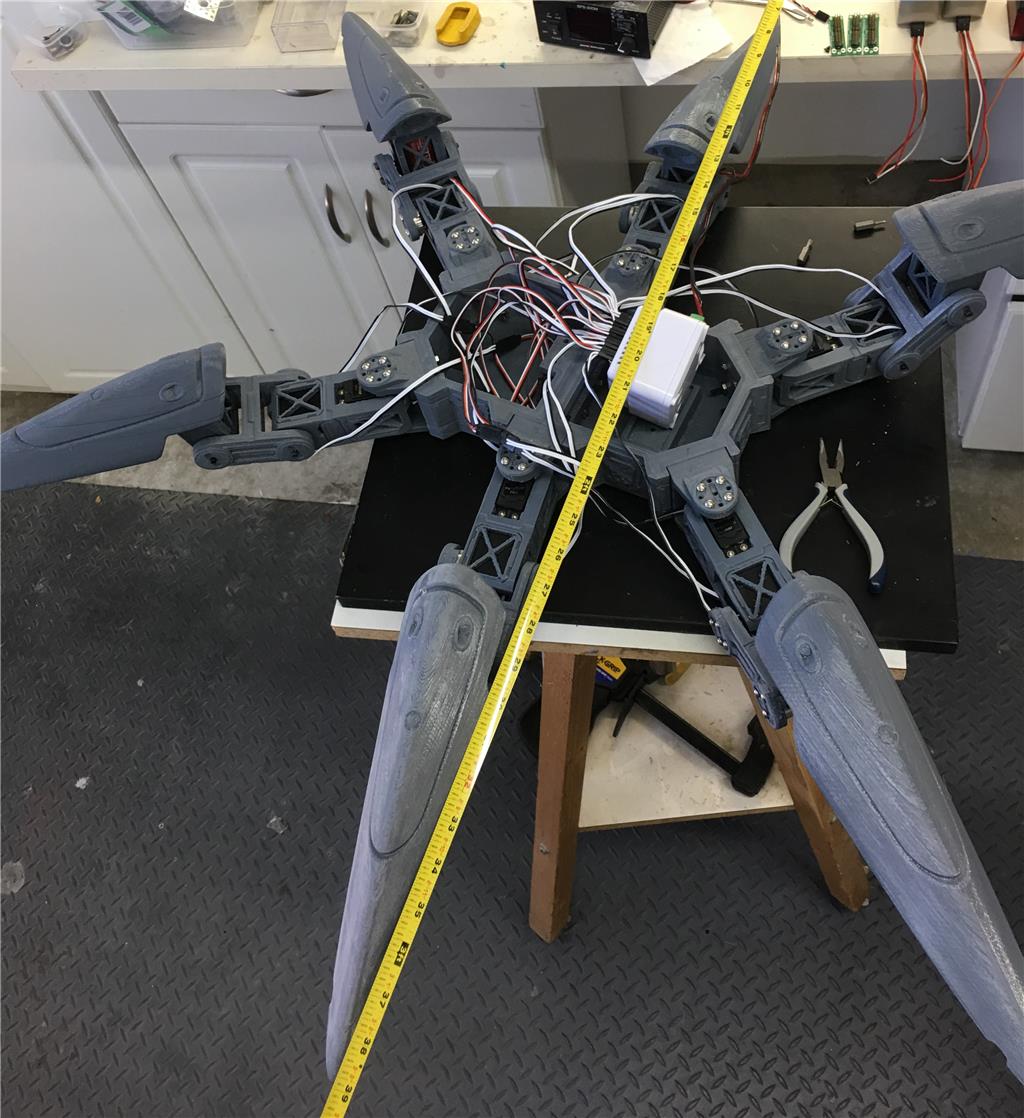
First thing I had do was figure out was how big would be too big? There are alot of reasons why not to go too big, which I ignored. So from an engineering stand point, "will it walk?" is the big question. At first I thought it would be about 5 pounds, then it went to10 pounds and now it might be around 12 pounds...so again time will tell. Maybe it walks once or 2 feet then crumbles!
I sourced out the materials and batteries. Knowing this was going to be a 23 servo design, I wanted a good battery and and chose a 7600 mah lipo. Maybe it will run for 15 min underload... again untested, time will tell.
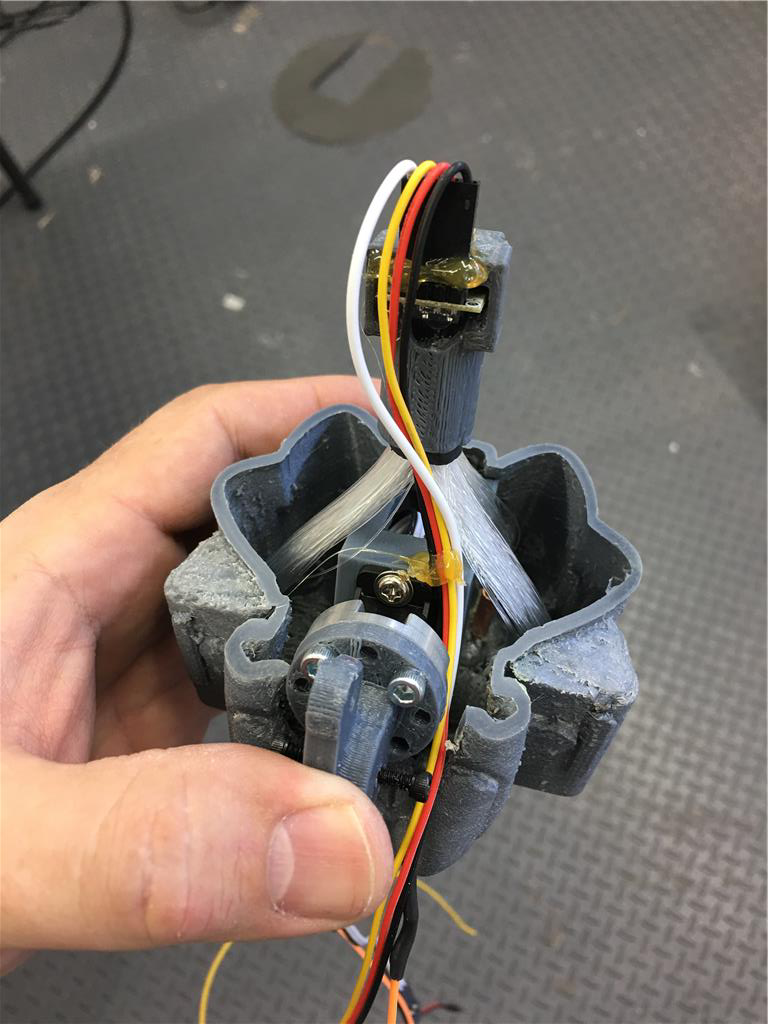
Finally I chose PETG for the print material, due to its strength. Two weeks of printing on 3 printers 24/7. There ended up being 53 individual parts.
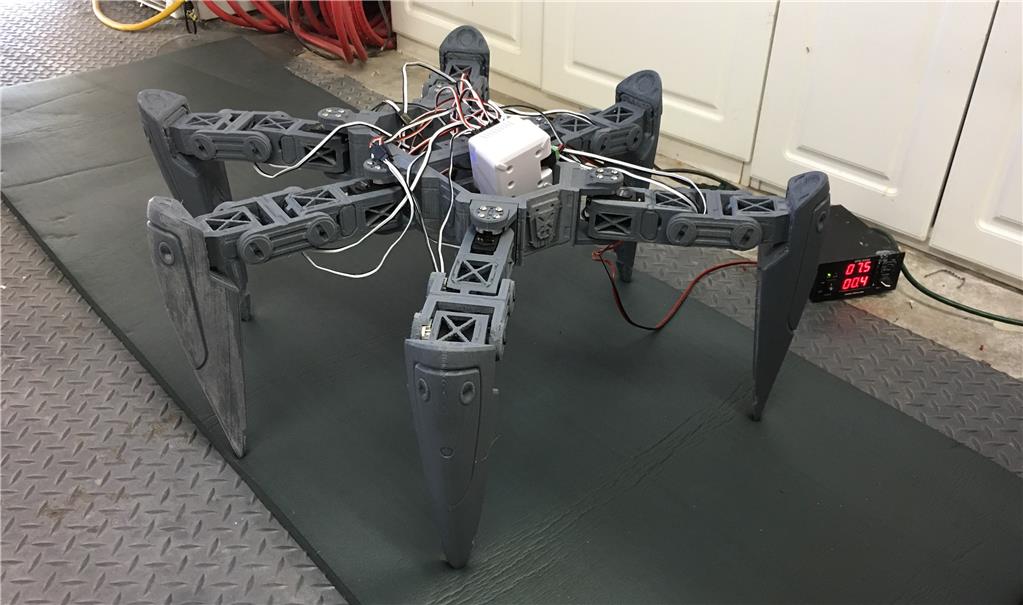
The Motions include 18 axis for the legs, waist forward/back tilt, waist rotate, cannon arm up and down, head up and down and rotate. 23 axis in total. The body is comprised of EZ Robots micro servos and the legs and tilt are the HDD servos also from EZ.
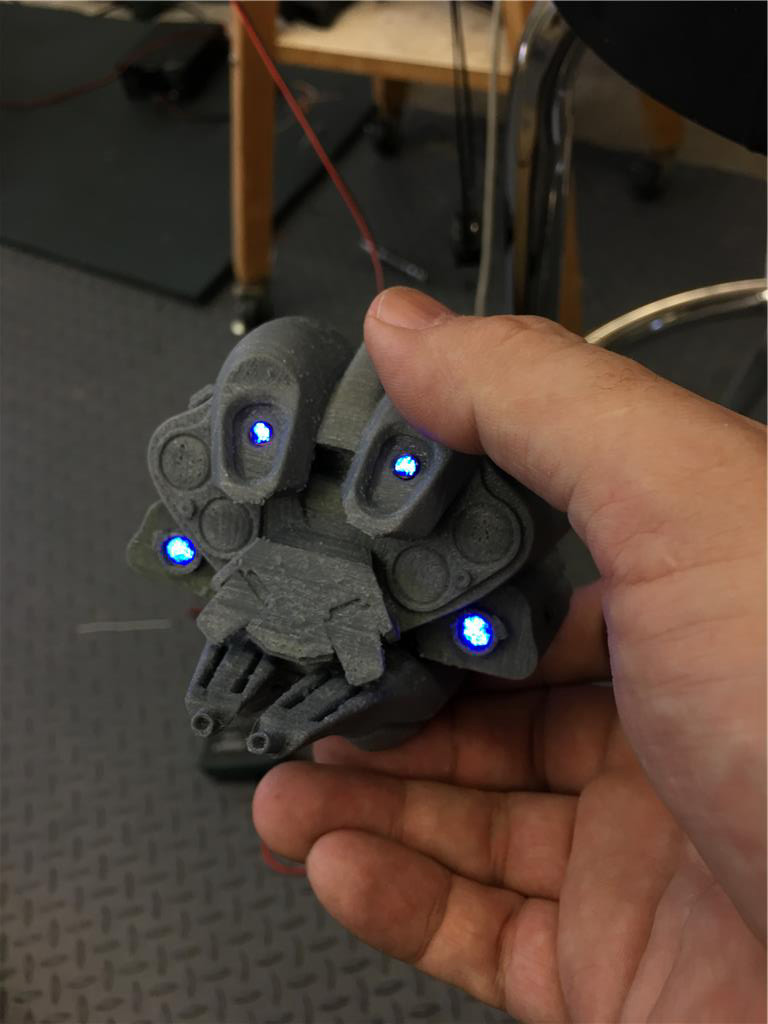
There will be an EZB inside and camera in his chest. A Bluetooth amplified speaker system onboard will allow us to play TONS of robot sounds from BlueZone.
I will updated this project as I finish goals, but if he doesn't walk due to weight or burning out servos due to stress, I will most likely abandon this build, as the next logical step would be to move up to dynamixels, but that would require $5000 worth of servos. A bit much for a toy!
So lets get started!
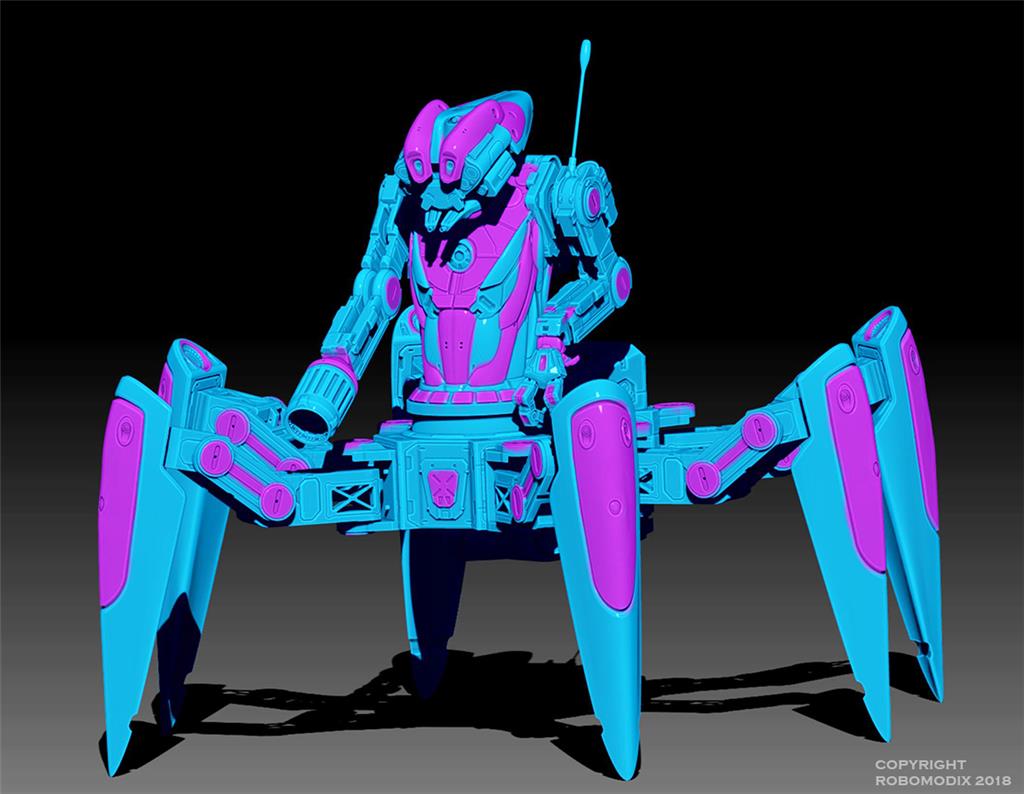
Here is a final design in zbrush and keyshot


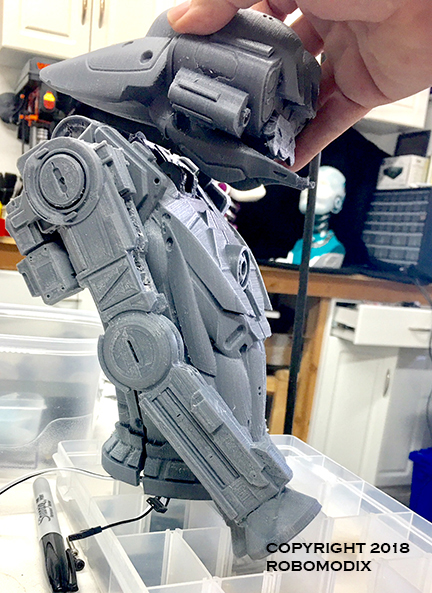
Then came the modeled parts each one 3d Printed.

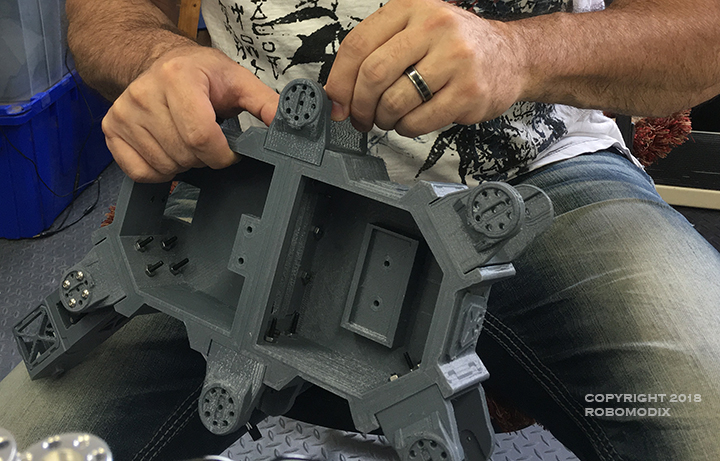
Here I've started adding the axis to the body

Here I continue on with assembling the main chassis
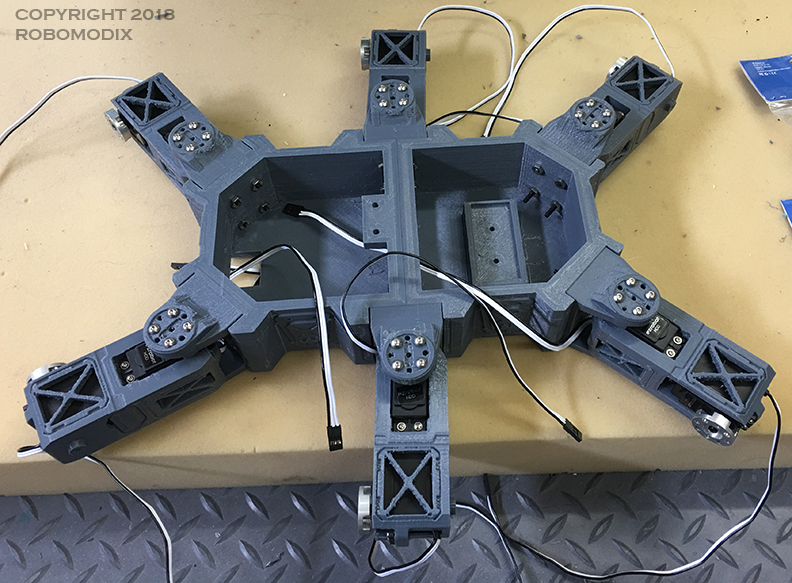
I could only assemble one side of the legs as I am waiting on some servos and screws to arrive.

And here is my first sloppy attempt at testing motion with autopoistion:
Discover more robots

Robo-Chess's Hector

Sweetn8's Tj Bearytales Hack


Thanks for the update. Looking good! Big improvements. This is going to be something very special.
Wow! Great movement- so impressive!
Well I played with walking bit today. I had always planned on using the tripod gait as that's the fastest locomotion for a hexapod. But because Gar has the upper body, it makes him front heavy. And the three legs that form the tripod aren't close enough together to keep him from tipping over.
So I looked at the other two gaits, one is called the wave (which in my opinion is too slow a walk for Gar) and the other is called the ripple. The ripple is kinda version of the tripod (three legs up and three legs down) except if does it one leg at a time in the tripod sequence. This will allow for 5 legs to hold the weight at all times and help him balance during walking.
The downside, is it is very difficult to animate using Auto Position . This is where the Unity to ARC animation bridge would come in handy. More needs to be explored on that front.
Next I will start to disassemble, fill and sand the parts and start priming them. Also finish off the gun arm. At this point everything will be ready for the final paint job.
This sure has drawn out..hopefully some progress soon.
It’s certainly been a labour of Love, I hope your son really appreciates it all! ??
It’s a shame about not being able to use the tripod gait, as I like that one best on my Hexapod ( ziggy ). I also like the wave but as you said it’s far to slow!
Your right about it is very difficult to animate using Auto Position, I spent hours going back and forth, trying to get the positioning just right on the Gaits.
Can’t wait to see a video of it walking.
@fxrtst I hve not been posting much lately, and the Virtual JD kind of grinded to a hold since I could not really figure out how to rig him properly to create a walking motion...but I am still learning a lot of Unity, and I have been making some progress with my own project! So we might have to check once more how far @ptp made it, but I have no doubt that animations can be send from Unity to the EZ-B! It works very well with Unity and the Rasberry Pi. I chose to port my robot to Linux, so I do not rely on a Windows driven PC!
Also what is very cool about Unity is, that we can develop an app for Android phones, so Gar can have his own custom Interface if you would like to go that way!
Great project, I am always happy about the Updates!
@cem, yeah its a bit disappointing..but hopefully with some speed the ripple will look ok. I've seen a few hexapods on youtube moving quite fast and it looks acceptable. I burned out a servo yesterday trying to do a walk cycle. Not easy to replace.
@mickey666maus That would be cool to develop an android app...but I do plan on using alot of the functions in ARC with this robot, so I was hoping for a way to record motions in unity and to export to ARC. That way i could import and assign some buttons for walking. I looked into it and you can definitely export csv xml files from unity.
I am open to any suggestions.
Update. I'm leaving to do reshoots for Avengers 4 for a few weeks. I still have not worked on this project for a bit. I ordered 12 servos that are a bit more powerful than the EZ Robots. They have a few more KG/cm per servo and less backlash. Hopefully I can get this reassembled and painted when i get back. I'm looking forward to moving on and creating new robots.
When will Avengers 4 be out? I want to see it! Hope you get time for your robots soon. I am sure everyone will be glad to see Gar walking.