

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots
Moviemaker's Here Are Some Rebuild Pix Of Marti
Marti robot rebuild photos showcasing Hazbot arms, Gizmo neck and assorted borrowed parts highlighting restoration and...
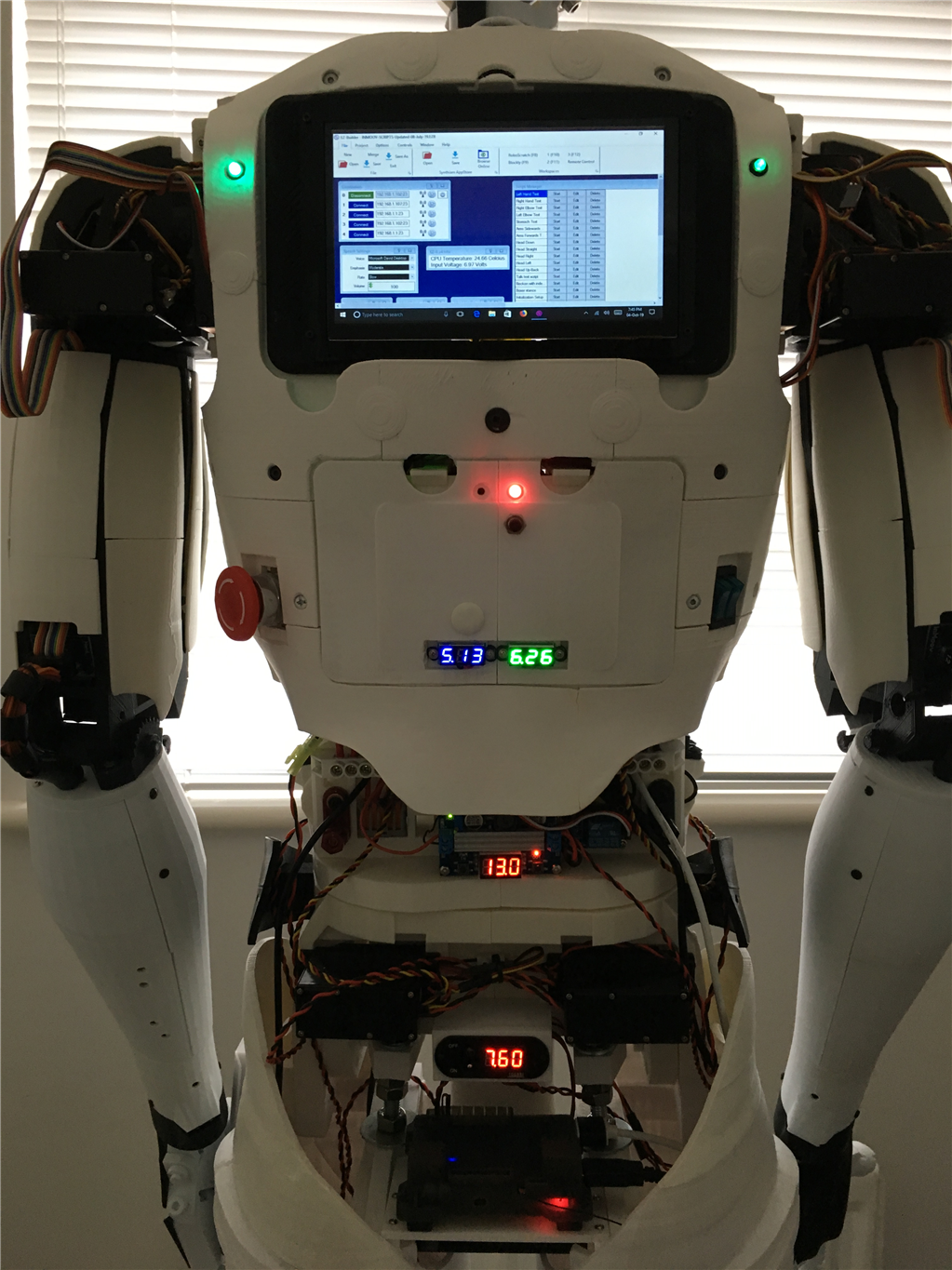
Cem's Inmoov With 7 Touch Screen Display And Lattepanda...
Run Synthiam ARC on a LattePanda V1.1 with a 7" touch screen for standalone InMoov control, auto-start projects and...

Joseph4760's Project X-Men
Project X-Men: EZ-Robot custom builds, modified tank with IP camera and sensors, Brookstone Rover, RAD 2.0, Ghost Rider...

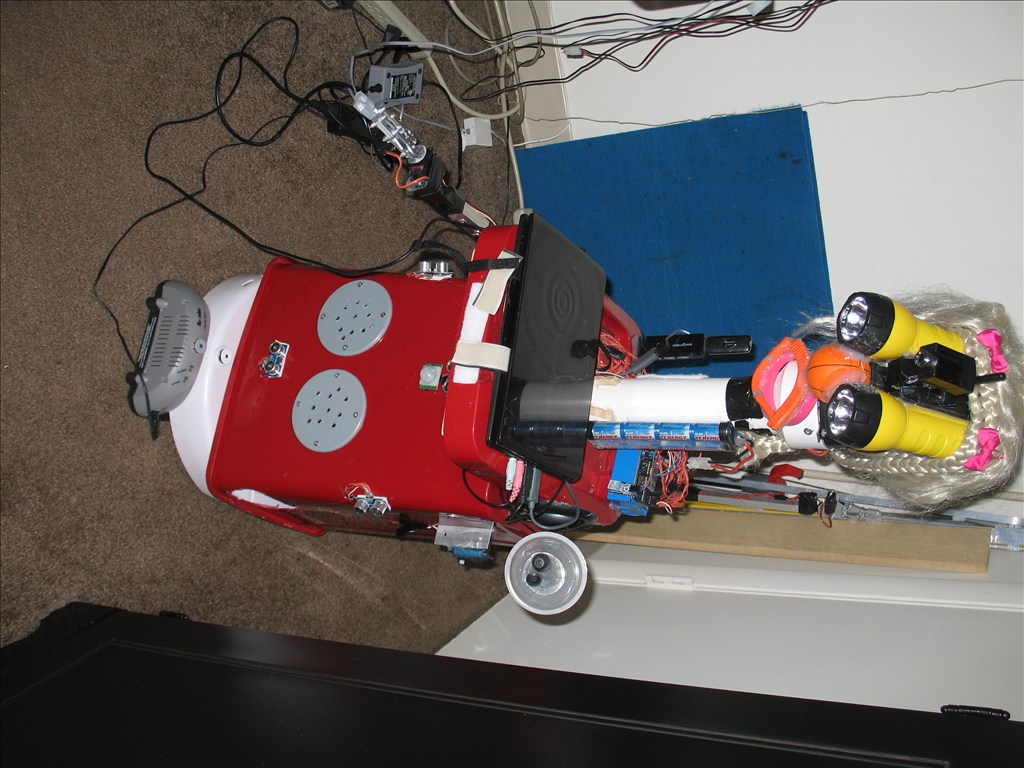
Ok just for fun I tested.how many batteries I could fit inside , I could fit one battery in the drawer , and 4 batteries in the bottom of the torso. Also one battery fit ontoo of the gearbox but that's completely impractical place to put a battery. So I have figured I could have a maximum of 5 yusa lead acid 12v 8.5ah batteries. That's 34 ah of juice , and 30 pounds total of batteries. With five batteries the platform would weigtht 45-55 pounds. More than likely I will only do three batteries. That's 26 ah and 18 pounds of battery weight. This feels like a weight the stock gearbox could lug around. Any opinions are appreciated! Take in mind I removed the 3 pound weight from the base and removed another 5 pounds from removal if the cassette player and stock motherboard.
You may want to add some weight to the drive section and just see if those motors can move it. Remember you also have the weight and drag of the vacuum to consider.
I'm going to get the battery tray done , mount up the fans , and mount up ezb. Right now I don't have a h bridge , it was accidentally not shipped with my ezb so all I can mount is the sonar and ezb, fans and batteries now.
Man it is really coming along! I really like how you are mounting it all in the bot. Looks professional. I still think you could add a spacer so you don't have to cut down the vacuum. I saw that someone else did it to 2000 that he painted black. It is somewhere in the forum under projects I think. He just used wood. Question Josh, If space is not a real problem and you already had one, do you think a standard ATX motherboard would be acceptable? Or is it more of a power issue?
It won't fit a standard atx unlesss the board was mounted sideways . The power supply has to be a small one. There are 160 to 200 watt power supplies , mine litteraly is 1.5 in x 3 in and produces 160 watts continous. But really though there are lots of atom power mini itx boards that use way less juice but still do the job. I picked this board because with a simple CPU change I can go from 25 watts 2.0 GHz , but I can plug a AMD Phenom X2 555 quad core 3.4 GHz at a drop if a hat.

Ok so I made a battery tray for two 12v lead acid batteries , still room for a 6v ub645 if I needed a dedicated 6v battery. But I have those voltage step down controllers in the way. I used 1 in thick shims on all for sides of each battery and glued them down so the under no circumstances will the battery move. Then cut a 1/2 in slot and ran a Velcro strap through and that straps down the batteries so they don't move even if turned upside down. (yup I did it). I held up the two ventalation fans , I will be making the drawer hole larger to match the size of two 5.25 drive bays. I have several xt60 plugs I'm using as high amp battery connections. At this point I just need to find a good mounting point for the hhd and t coming soon a blueray disc drive. I also checked the vacuum power head vs the rear wheels which is where I thought of mounting the power head.Omnibot is going to have a full belly for sure ! J.W.
J.W.
A full Omnibot is a happy Omnibot! Lol. Right now I'm kicking around a idea to use two servos in tandem for arm movements. Mounting two side by side and run a pushrod on.each side of secondary helper servo to main drive servo. Both would share the same signal and ground so they move together this would pracically double the torque the shoulders have. I would like the arms to be able to lift 3 plus pounds so it can hold a wine bottle with no problems.