Built out matching 1500 MAH NiMH packs (one per foot) also aux power from either battery back to run the EZB. Should run for a bit between charges.
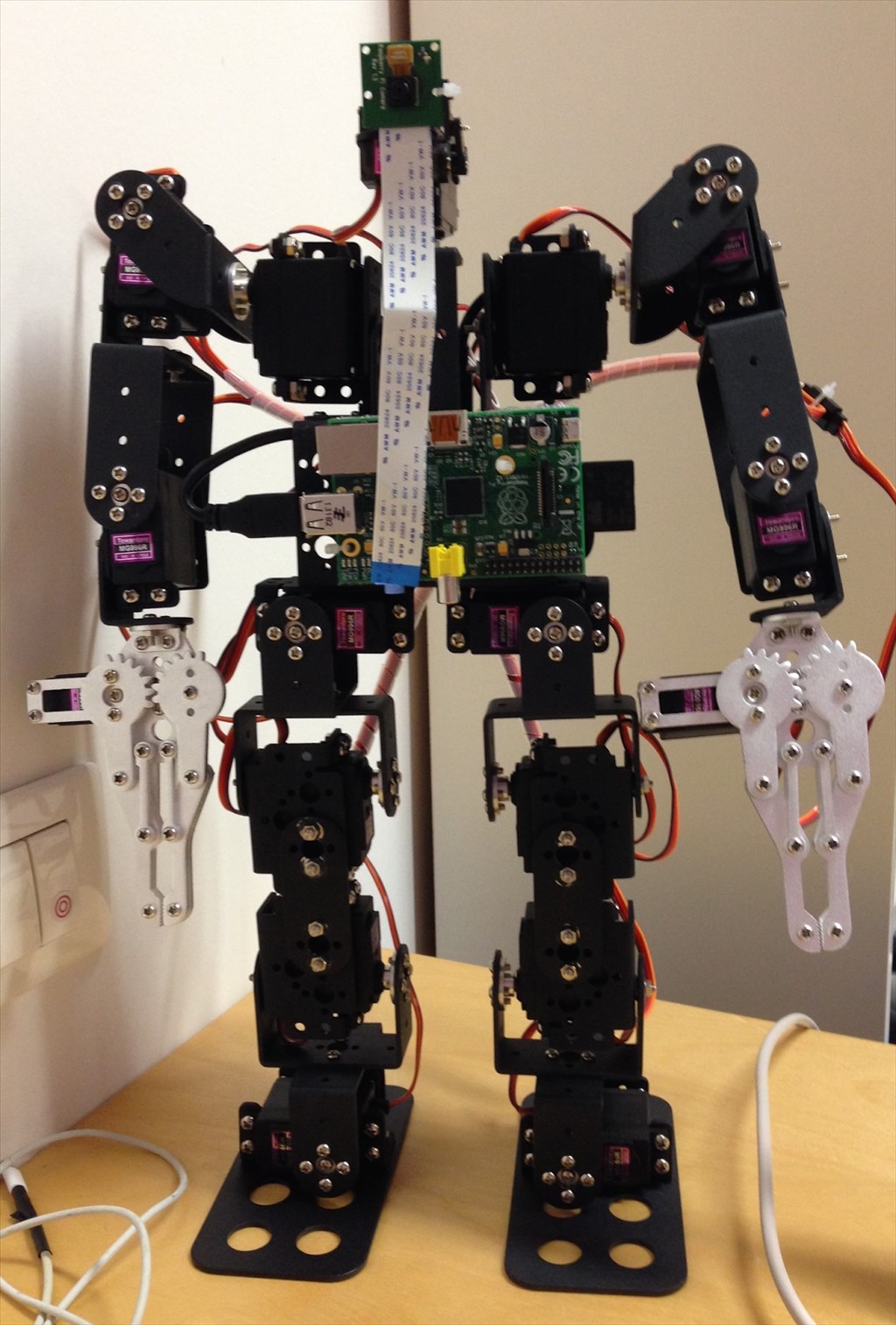
Well on to building frames for actions.
By kleinjd
— Last update
Discover more robots

DJ's Scarab Creepy Robot
Scarab robot retrofitted with EZ-B and Synthiam ARC for remote control, HC-SR04 autonomous exploring, voice recognition...

Ezang's Mr. Conehead Dancing, Take 1 - I Will Try More...
Stabilize hard-to-balance Mr. ConeHead for dancing, preparing for Take 2.
Crivellarodiego's How To Automate The Robot
Create an ARC project to migrate your Raspberry Pi-based robot to Synthiam ARC, configuring hardware, scripts, and apps...

That is SWEEEEET
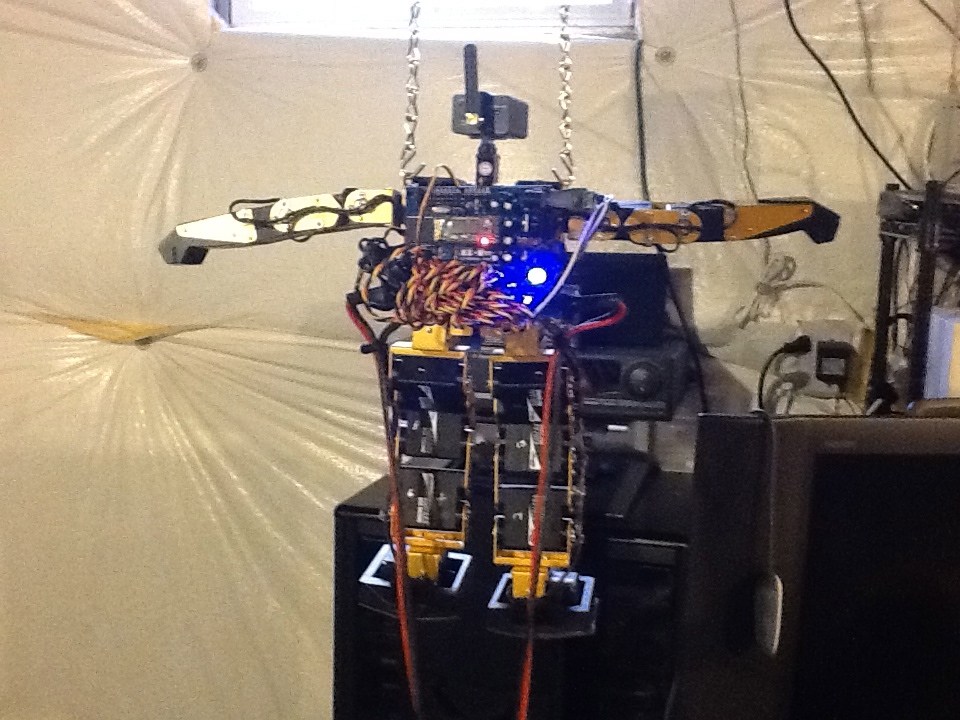
Thanks, this should be a lot of fun. Need to figure out a good support to keep him upright while I work on frames and adjust for his CG. He really needs to be supporting his weight to get the positioning right with so many DOF.
Nice, Please upload a video when he starts moving.
Very awesome! I'm really excited to see videos also!
The Auto Position control with movement is perfect. Take a look at the example robophilo project as a start
Well that was interesting, just set the speed down real slow, and started a nice smooth motion to stand on one leg. Fortunately I am running him off a bench power supply. Watched the current go to almost 2 amps, with all the weight on the left leg!
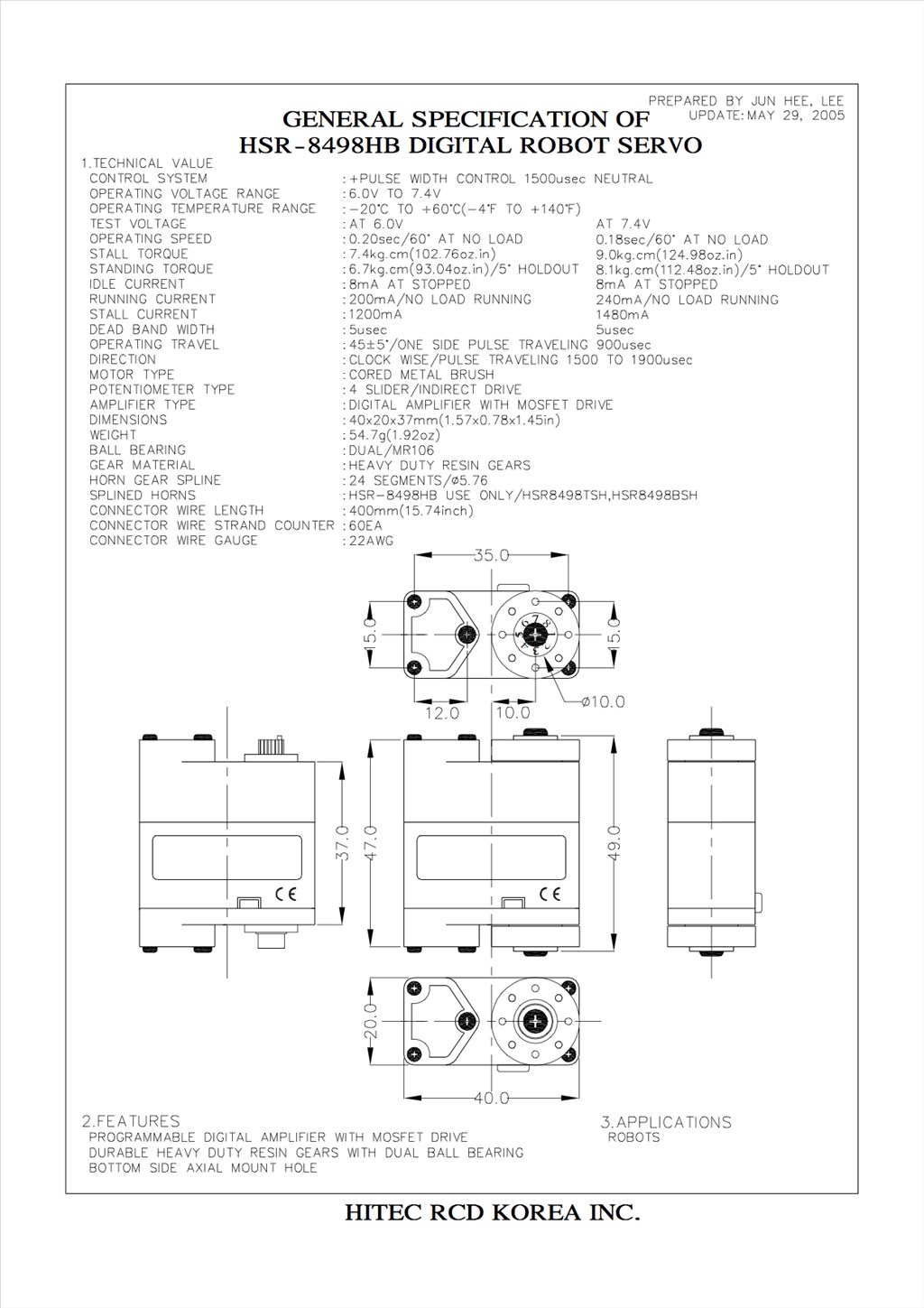
Looking at the servo spec, it says they will take up to 7.4v at 1.4 amps each at stall ! I am not sure I believe that spec. The original batteries were 6v, and he would run for about 15 mins on a 1000 mAH battery just walking. I am a bit nervous since Hitec does not make these servos any more, and they are hard to find if I toast one.
The knee took the weight but got more than a bit warm to the touch.
Am I just being paranoid?
Here is the servo spec if you are wondering.
Darn Knee servo went. stress
I can't tell from the pic but is there a fan on the ez-b?