






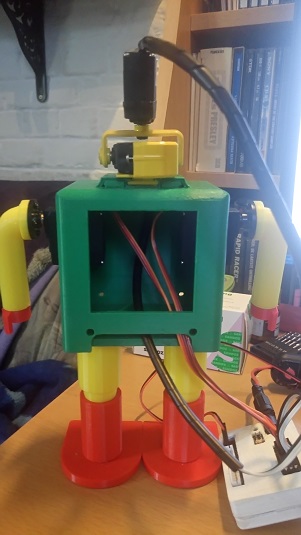

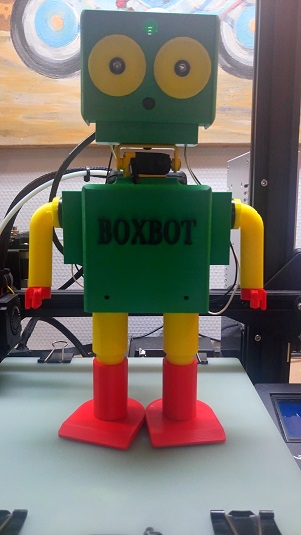



P2 stands for printed second version boxbot.cause dj made the first boxbot. the V1 stands for version 1.version V2 will get some wheels. this robot is a desk robot to train excample camera /position movements and more. it has 4 micro servo's camera still to come ,two flat eye LED blue. the red covers lowerlegs are changeble i, other colors. still need to do .head to print/camera /choulder covers (servo's )
By Nomad 6R
— Last update
Discover more robots
Moviemaker's Bobii Reborn From Frizby Bob
EZ-BOB: rebuilt from Arduino BOB Frizby with glowing red LED eyes, series resistors, lopsided compact DIY conversion

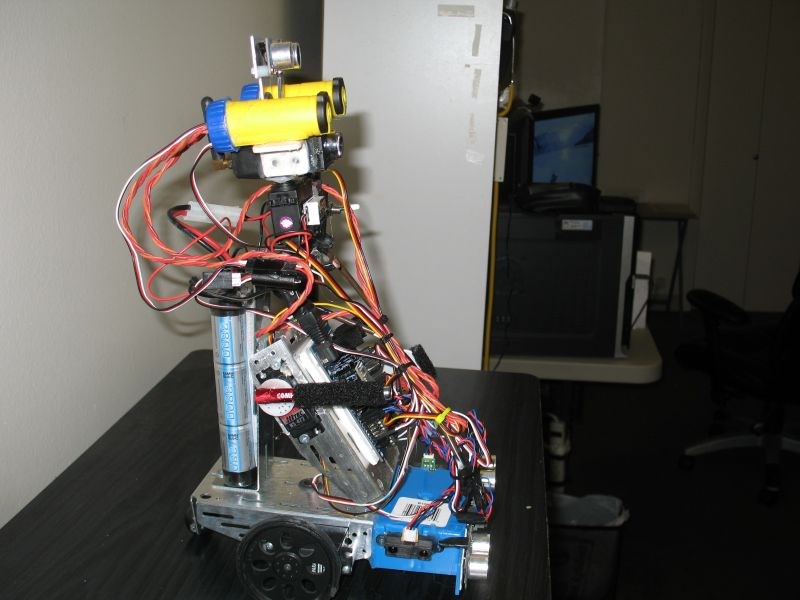
Ezang's Simple Bot Car Robot
Simple Bot car using 2 continuous servos, IoTiny controller with speaker, ServoCity parts and Synthiam ARC for servo...
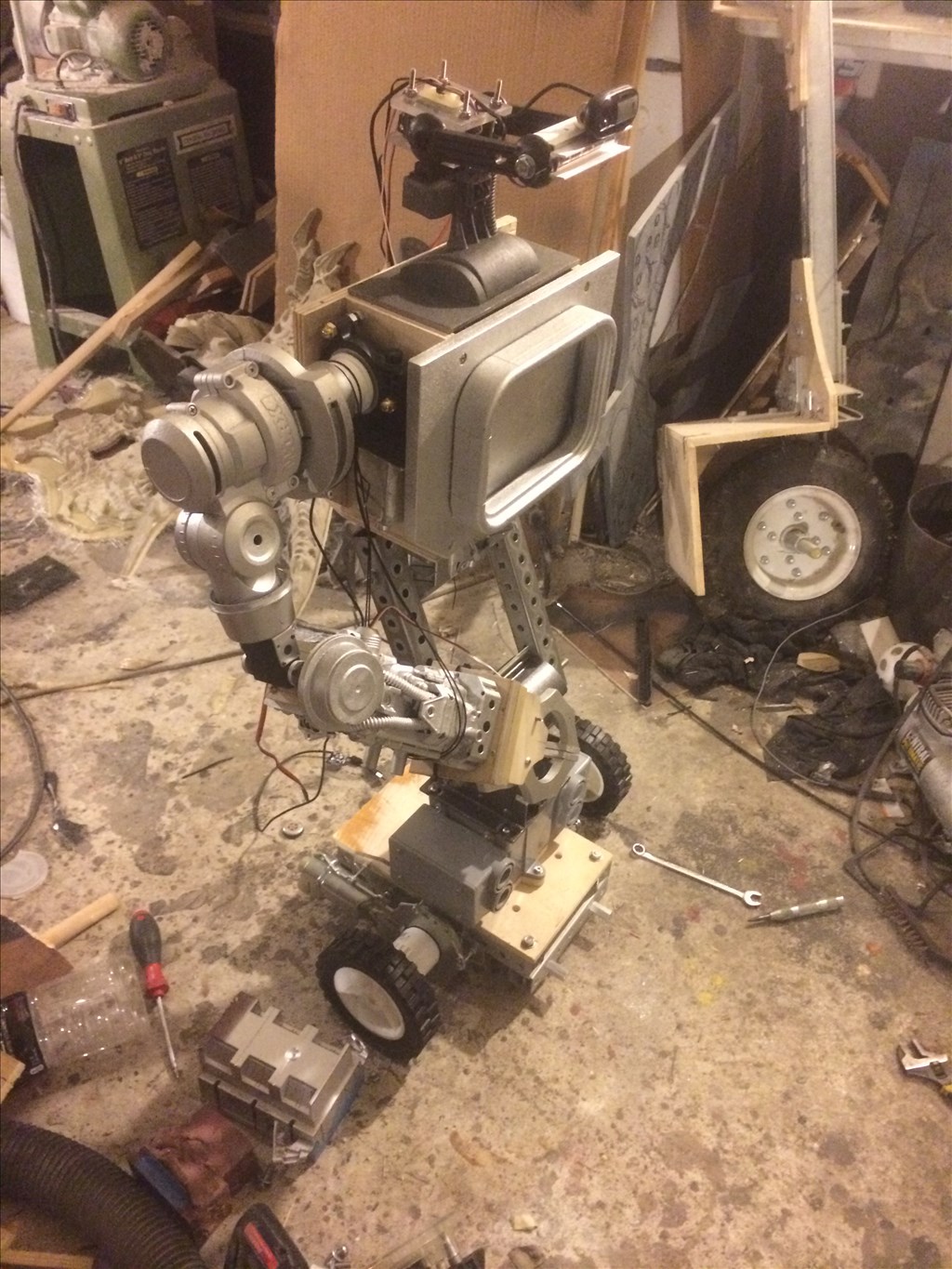
Doombot's Dirgebot V1
Dirgebot: 3 ft 4 in kid-friendly robot prototype with V3 board, webcam and W3 Iconia; seeking Synthiam ARC programmer...

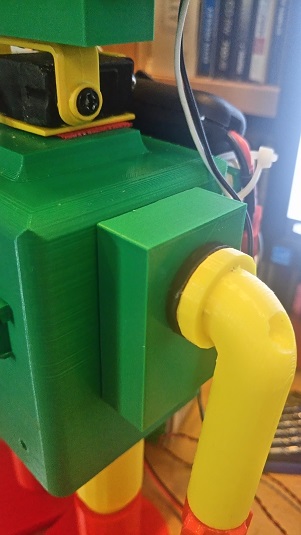
shoulder covers and neck cover are reddy.
My god!!!! So cute!!!!!
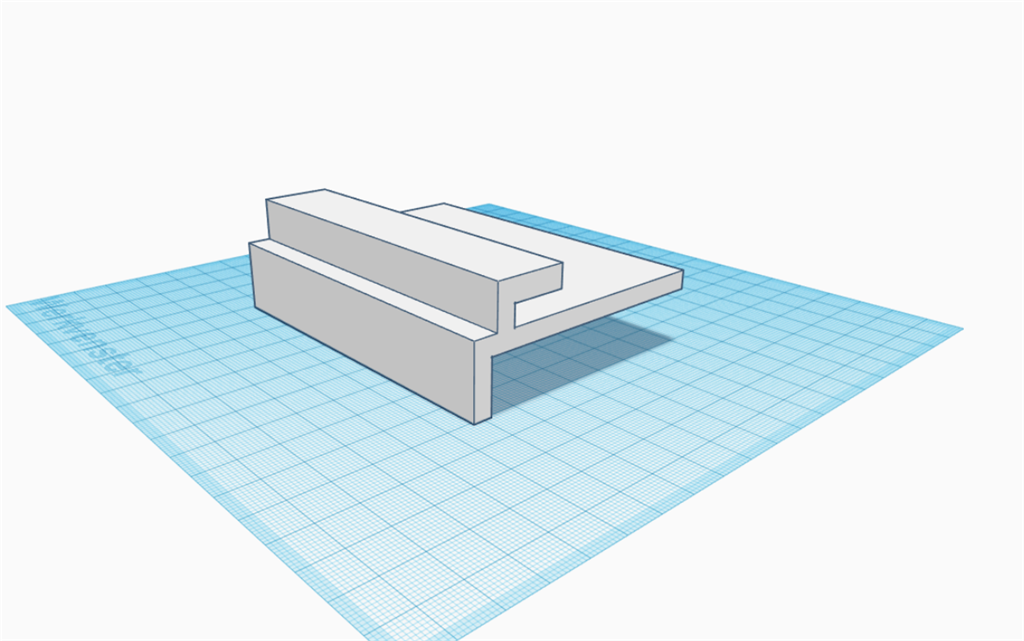
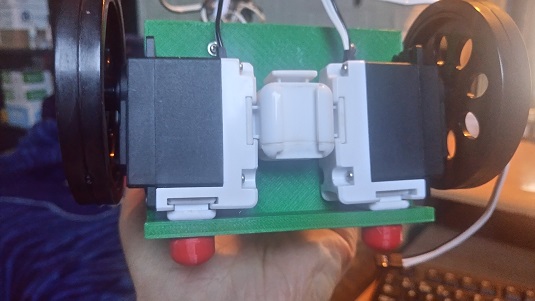
here's the wheel plate.using the ez robot wheel servo's.
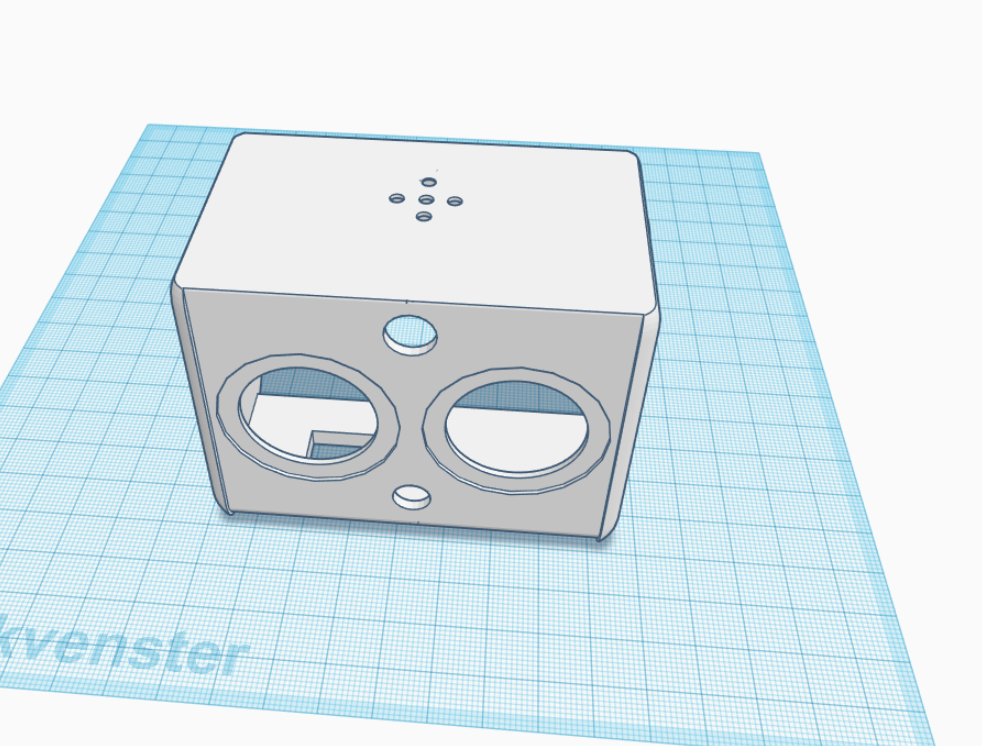
you can see the two tiny screws to keep the feets inside the plate. inside front plate are the two squerre and spindel.
waiting for parts DUH.
Your robot is looking good Nomad, Does he have a name?
I just got back from my other life , the country / farm life - back to the city.
when will a video be coming of your robot? Keep me posted
thanks again EzAng
hi ezang
the name is boxbot p2-v1 comes from p2 means printed and two means second boxbot. dj made the first one in cardboard.v1 stands for version 1 to make a video i need this sensor,
sensor
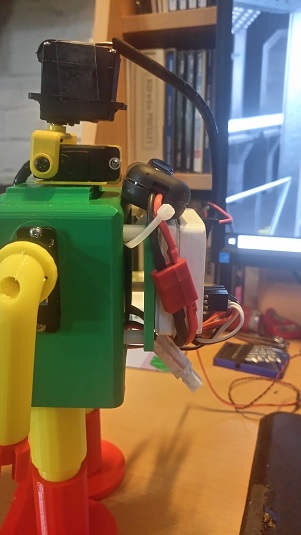
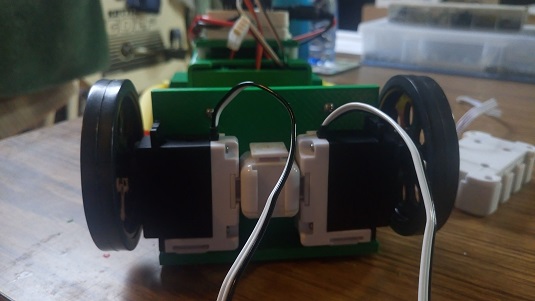
here you can see how the wheel servo's are connected to the wheel plate.
Nice job on the wheel base. Makes for a nice finish to the build. Will be cool to see it roaming around.
nice job Nomad, waiting for your video.
EzAng