





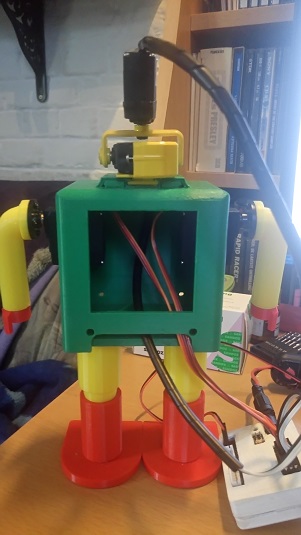
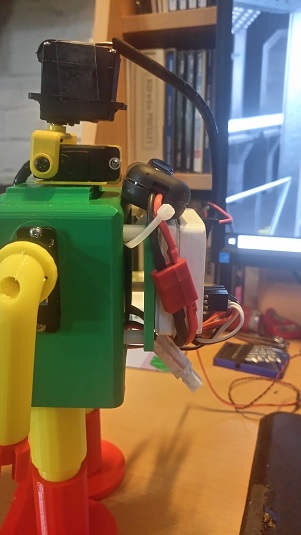

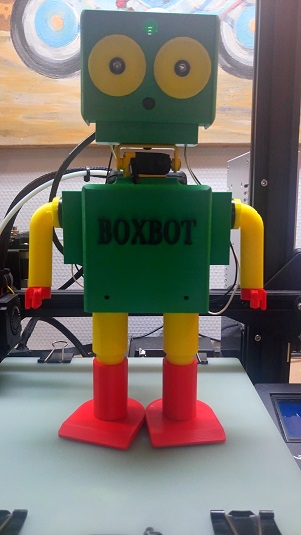


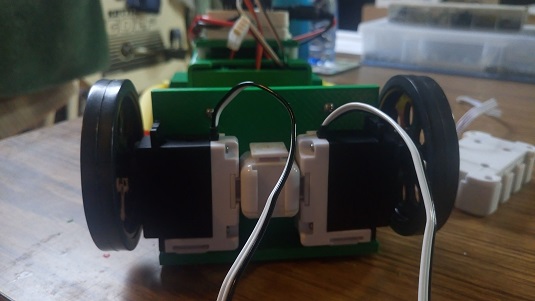
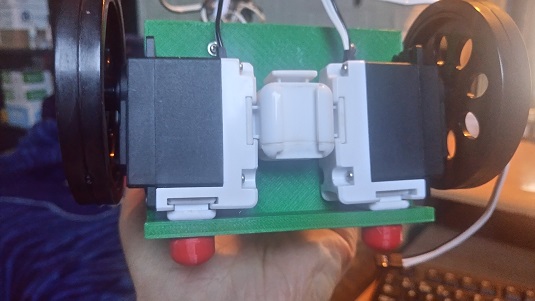

P2 stands for printed second version boxbot.cause dj made the first boxbot. the V1 stands for version 1.version V2 will get some wheels. this robot is a desk robot to train excample camera /position movements and more. it has 4 micro servo's camera still to come ,two flat eye LED blue. the red covers lowerlegs are changeble i, other colors. still need to do .head to print/camera /choulder covers (servo's )
By Nomad 6R
— Last update
Discover more robots

Bhouston's A New Hand For Inmoov?
InMoov hand hack: Exiii Handii modified for independent finger control, wrist with EZ-Robot lever servo, EZBv4 control...

Cliffordkoperski's Hydrualic Arm And Hand
Hydraulic system operated with EZB4 controller

Nallycat's Cog A Social Interactive Robot
Custom Zoe robot head with added mouth, standard metal-gear servos and EZ-Robot V4 controller, camera and illuminated...

hey ezang
i am still using PLA.
ok thanks
EzAng
Did you ever use PETG?
no only PLA.no other filaments.
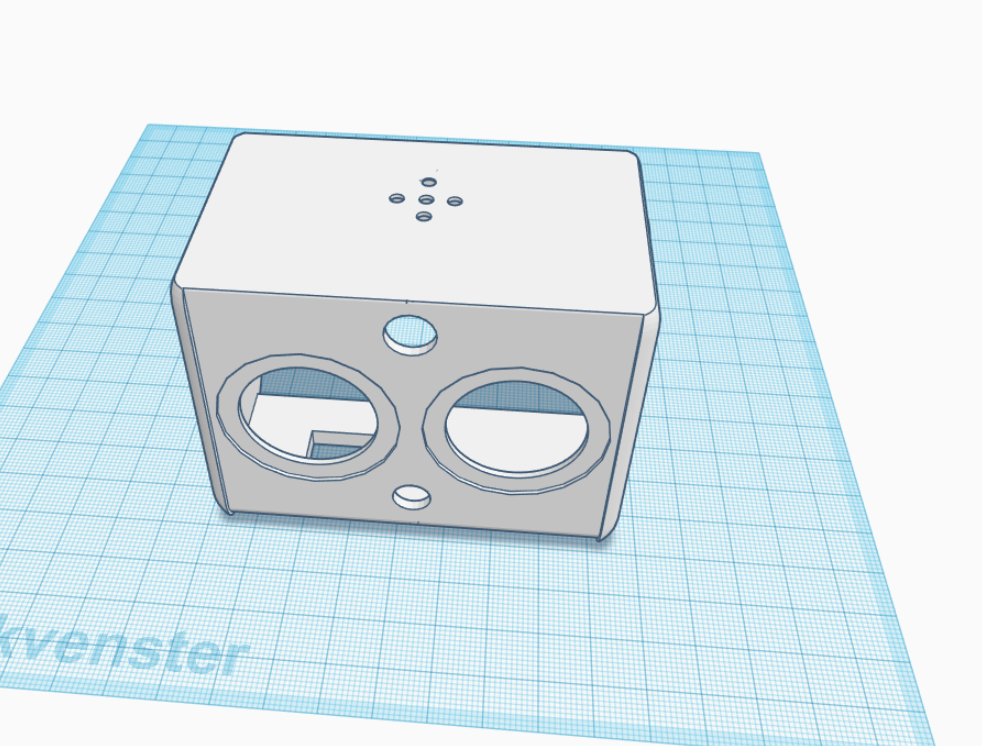
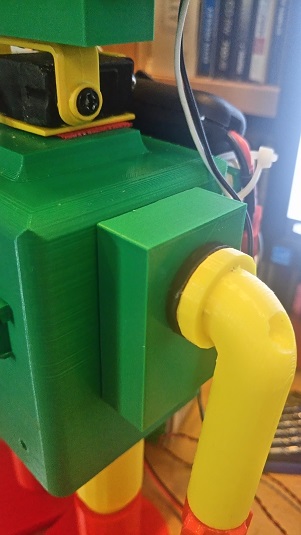
some adjustment are made on the head. there is room for the camera and a little speaker.
I am here, a little slow out here :-)
looks great, my robot friend -
any videos?
EzAng
i have to upload a video.
i am uploading the video now.