



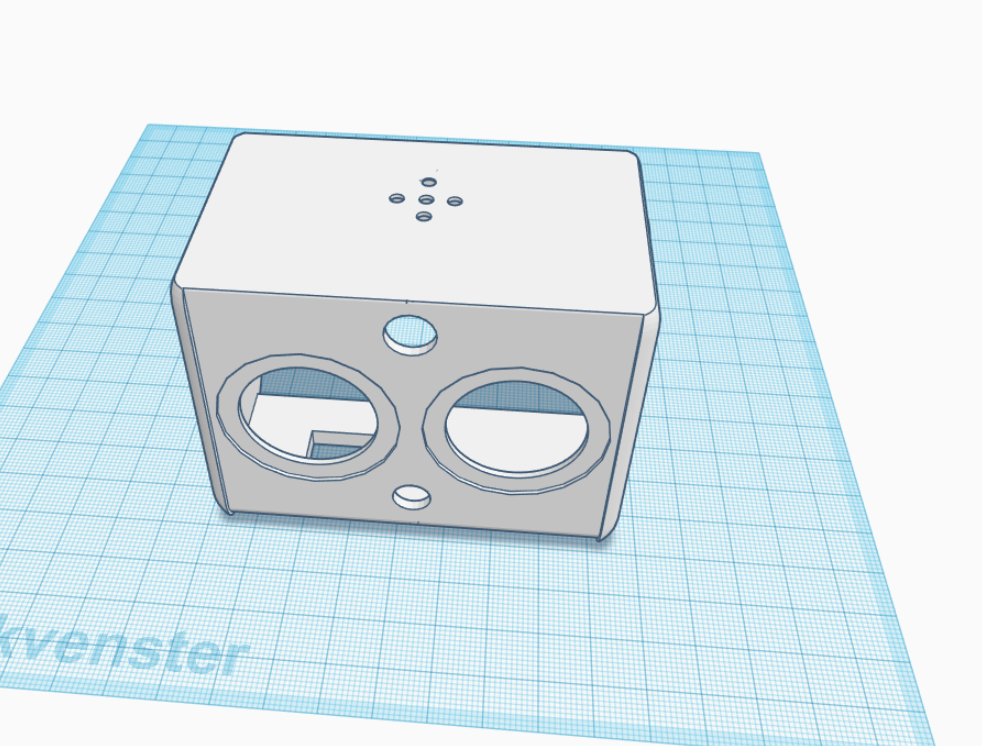


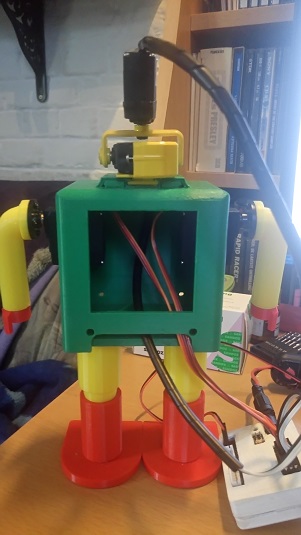
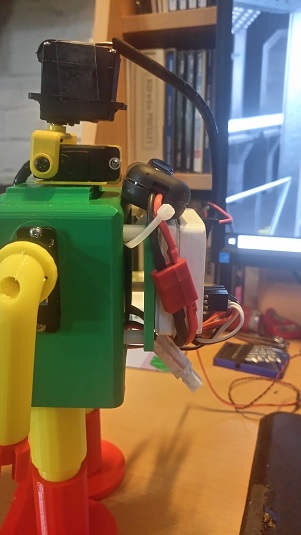

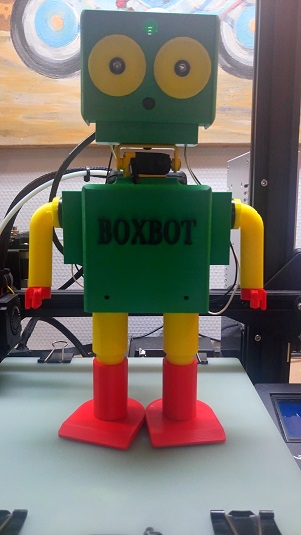


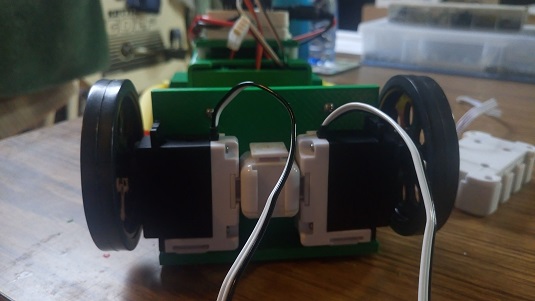
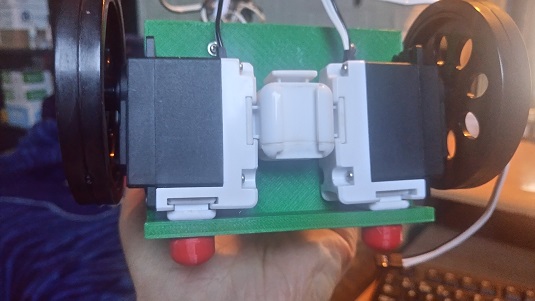

P2 stands for printed second version boxbot.cause dj made the first boxbot. the V1 stands for version 1.version V2 will get some wheels. this robot is a desk robot to train excample camera /position movements and more. it has 4 micro servo's camera still to come ,two flat eye LED blue. the red covers lowerlegs are changeble i, other colors. still need to do .head to print/camera /choulder covers (servo's )
By Nomad 6R
— Last update
Discover more robots

Ezang's Robot Hand / Fingers 1/5/2020
Practice robotic hand built with 3 small servos, auto-position and voice control, with Xbox 360 Kinect integration for...

DJ's AR Drone Parrot
Control AR Parrot Drone with Synthiam ARC to add camera tracking and red-ball chase via WiFi, joystick, speech,...

Ericez's Droid For Theater Robot Contest
Build low-cost BB-8 and R2-D2 Star Wars robots from PVC water pipe and control them using an EZ-Board.

here's a little video.
Nice eye lights, good movements - Almost a JD robot
He he walk yet?
EzAng
he wil get wheel base.
I used the servo City Prowler Robot Kit
Check these: https://www.servocity.com/kits/robot-kits
Also the Actobotics Attachment Ideas are great to look at:
https://www.servocity.com/actobotics-attachment-ideas/
EzAng
wow these are awesome wheels.thanks for the links. haha funny there is one with my name,NOMAD . nomad wheels
lol yes that is funny nice wheels
Hi Nomand, That head came out great. Cant wait to see the wheel base you choose
hey robohappy
sorry for late respons.i was also thinking off using the two balance board, and some ez wheel servo's.