



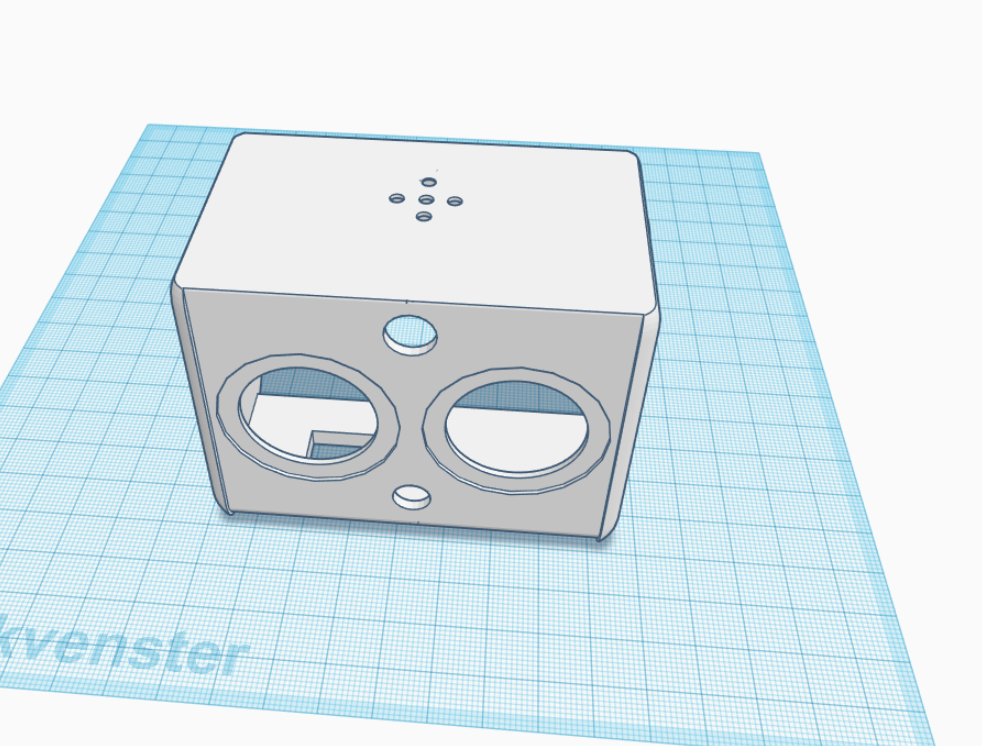


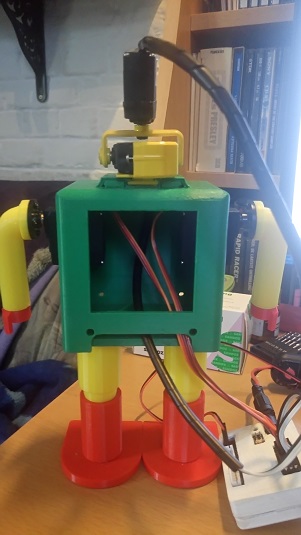
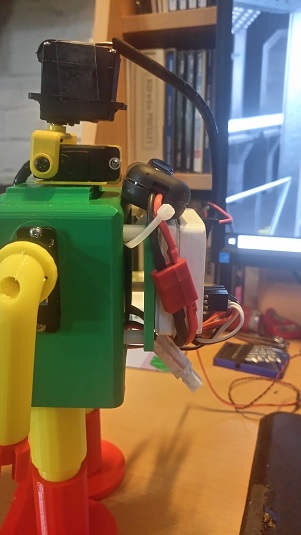

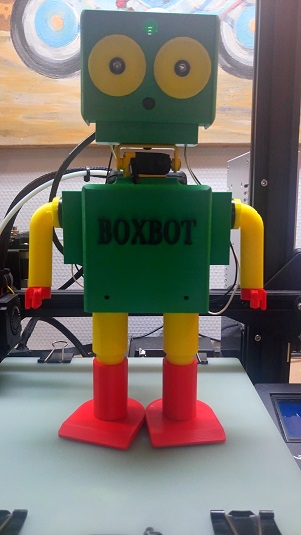


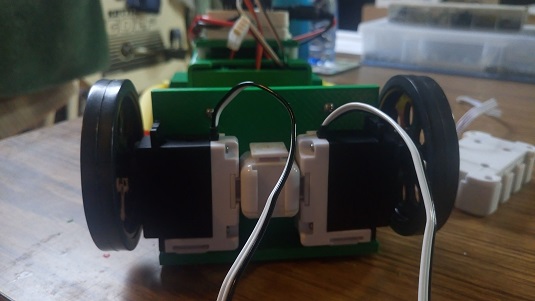
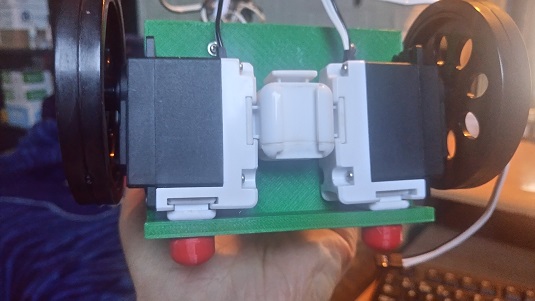

P2 stands for printed second version boxbot.cause dj made the first boxbot. the V1 stands for version 1.version V2 will get some wheels. this robot is a desk robot to train excample camera /position movements and more. it has 4 micro servo's camera still to come ,two flat eye LED blue. the red covers lowerlegs are changeble i, other colors. still need to do .head to print/camera /choulder covers (servo's )
By Nomad 6R
— Last update
Discover more robots
Wayno's Cartoon Robot Into A Real Robot
Transform words into cartoon "Wordtoons" and bring them to life as real robots using the EZ Robot Kit.

Ezang's My New Robot Hand To Practice With - Video
Synthiam ARC controls a DIY robot hand with auto-positioning via Arduino Uno; servos glued for quick prototyping

Cem's Eyepod Using Neopixel & Ardiuno Nano, Conrtolled Via A...
Control NeoPixel ring via Arduino Nano and EZ-B IoTiny, script servo motion for Perry's 3D eyepod; troubleshooting iris...

thanks guys.just one part to go.xD