







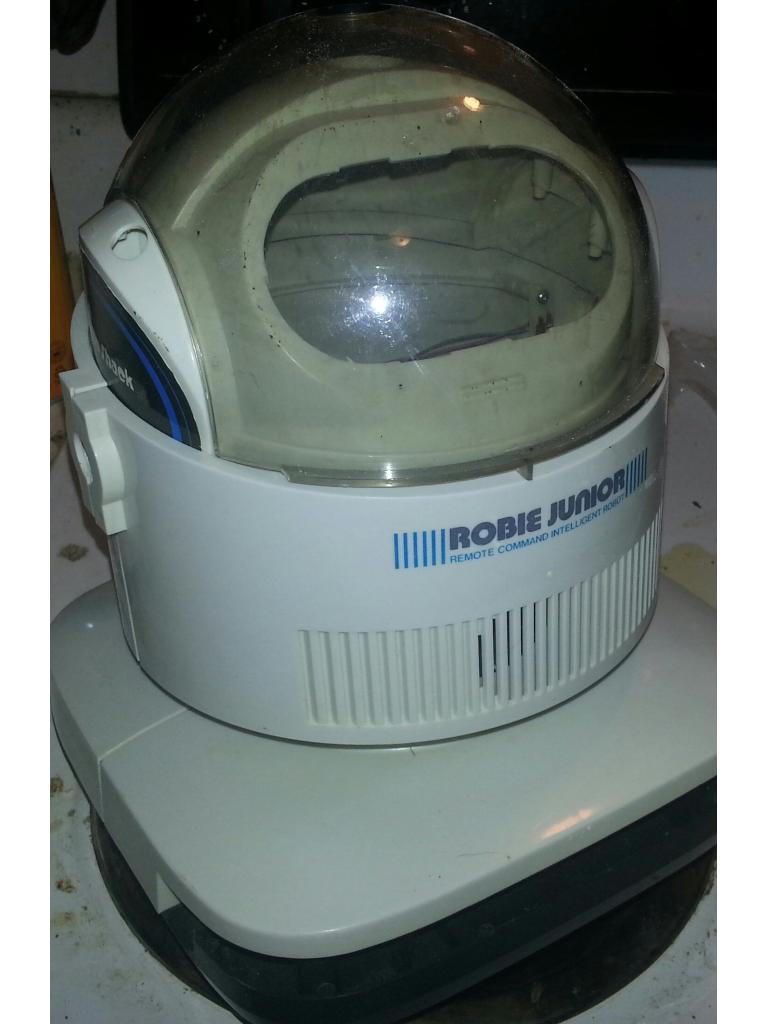








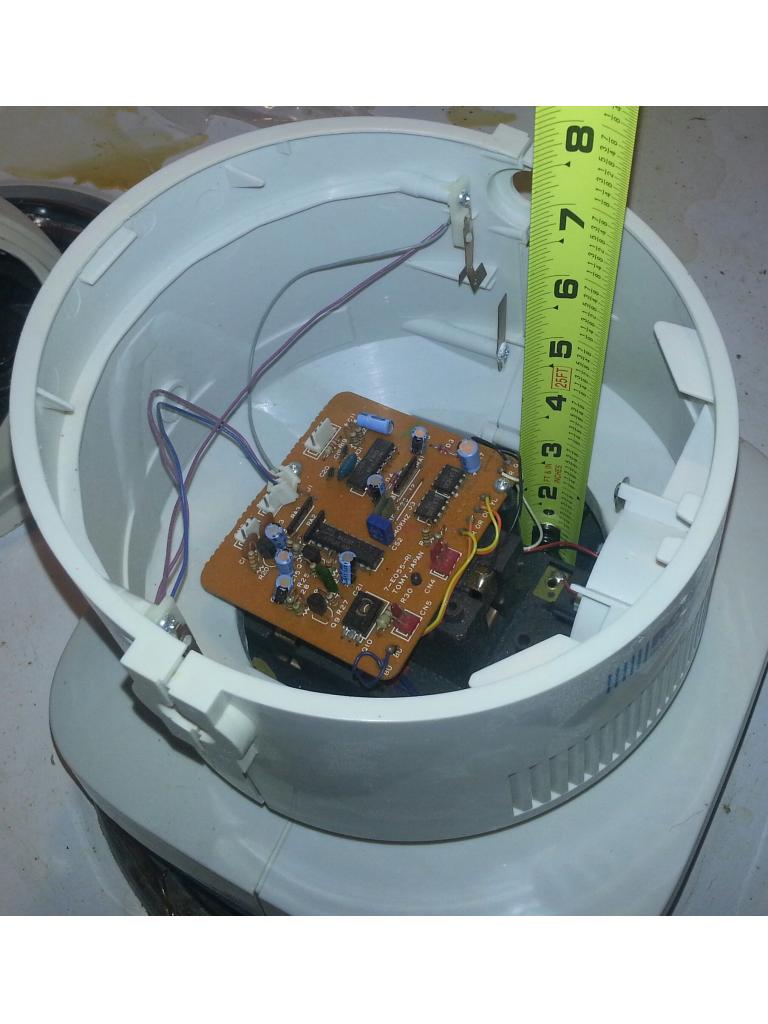




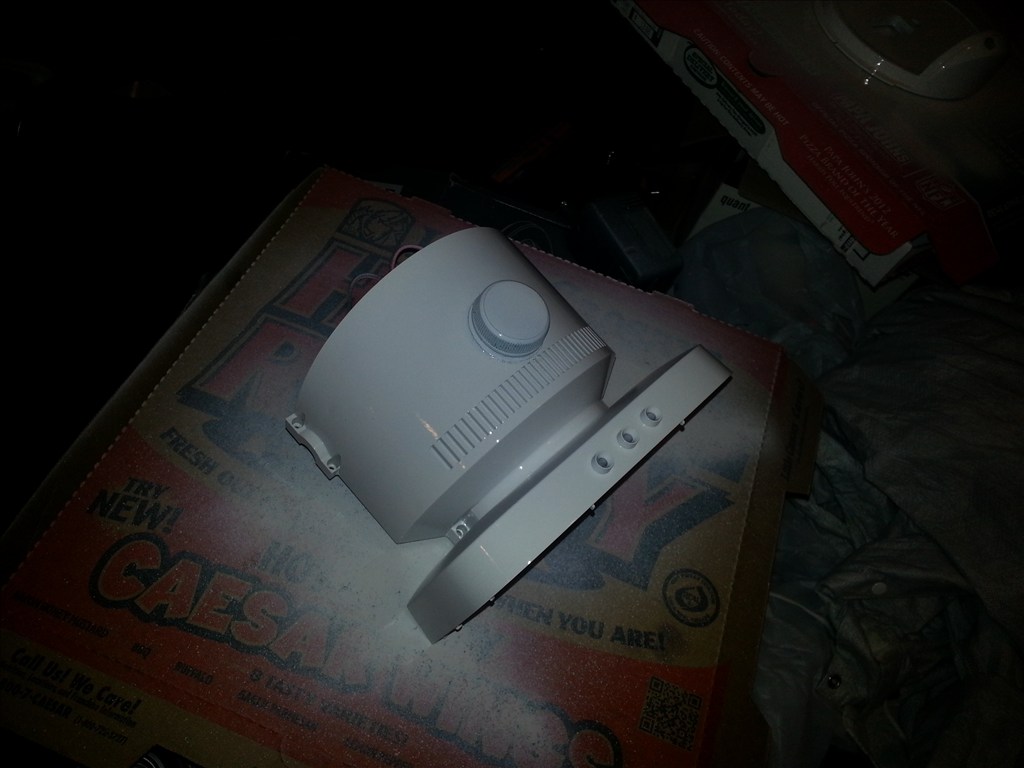
















































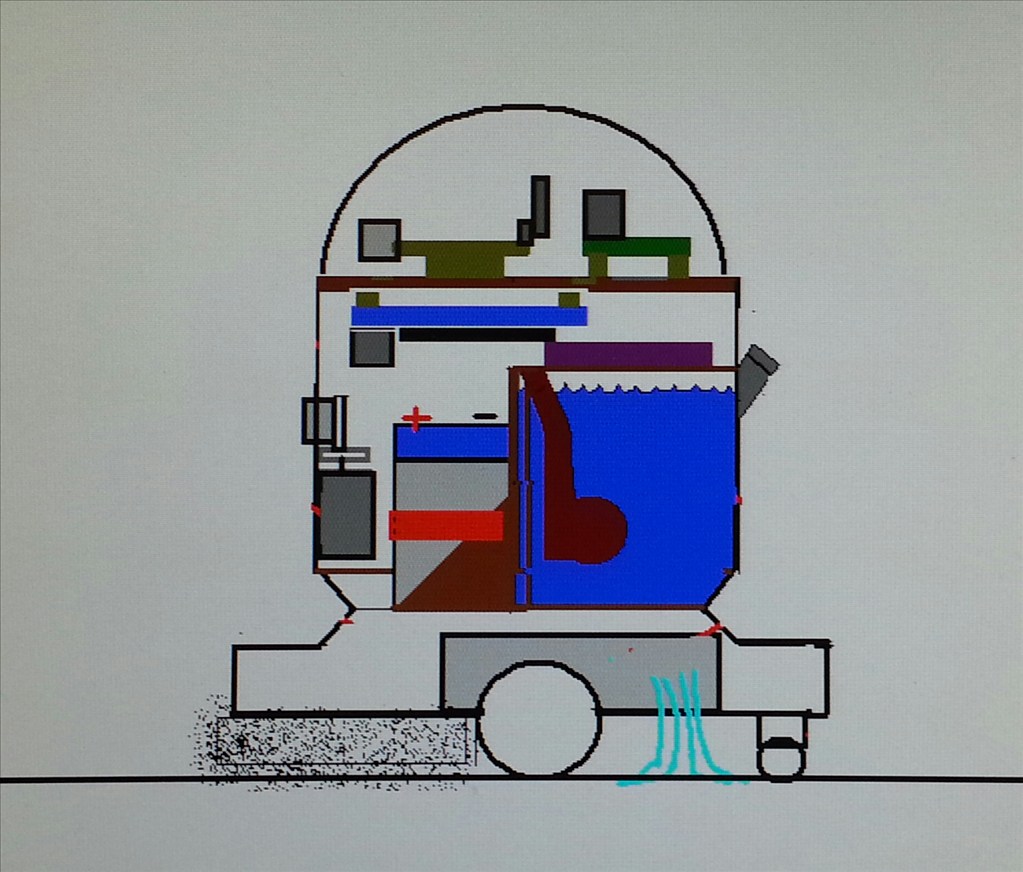






































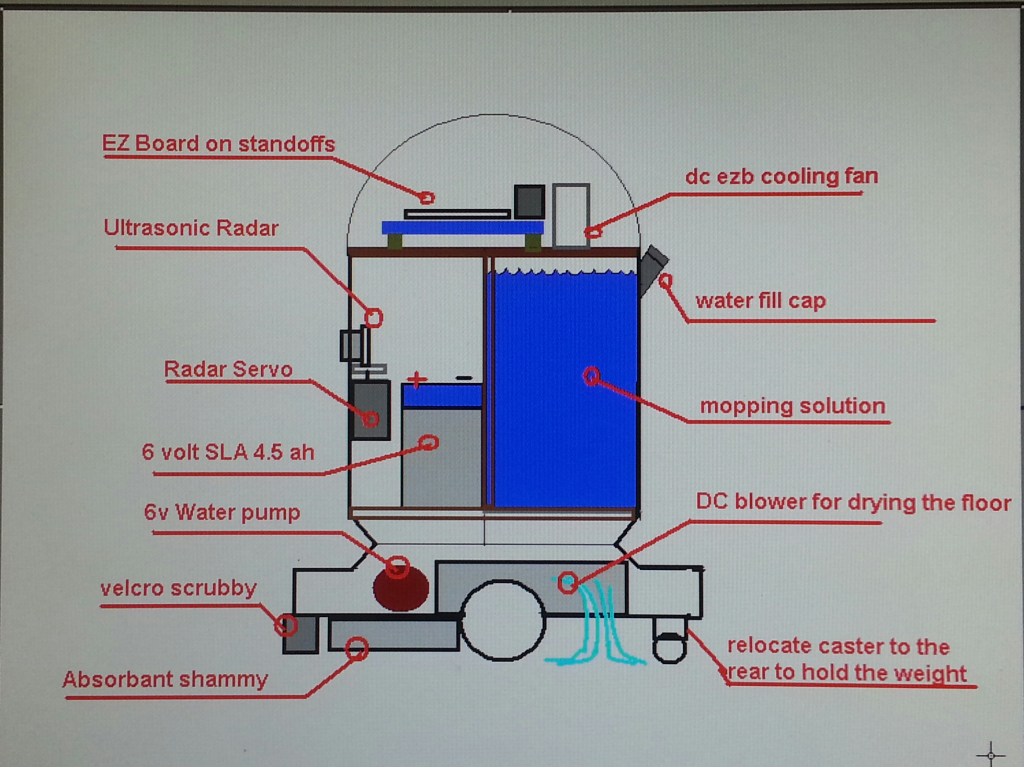


























This is a simple project that hopefully I wont over complicate. Since he Squeegee needs to get as close to furniture and the toilet and bathtub as possible this my be a challenge. After all we spend most our time trying to get our robots to avoid the objects in the room. Im giving new life to a radioshack robie jr rc controlled robot.

By jstarne1
— Last update
Discover more robots

Jstarne1's Roli Wants To Dress Up As A Drd For Halloween
Roli's DRD-inspired Farscape robot costume honoring a friendly, helpful ship-repair robot; finished photos updated.
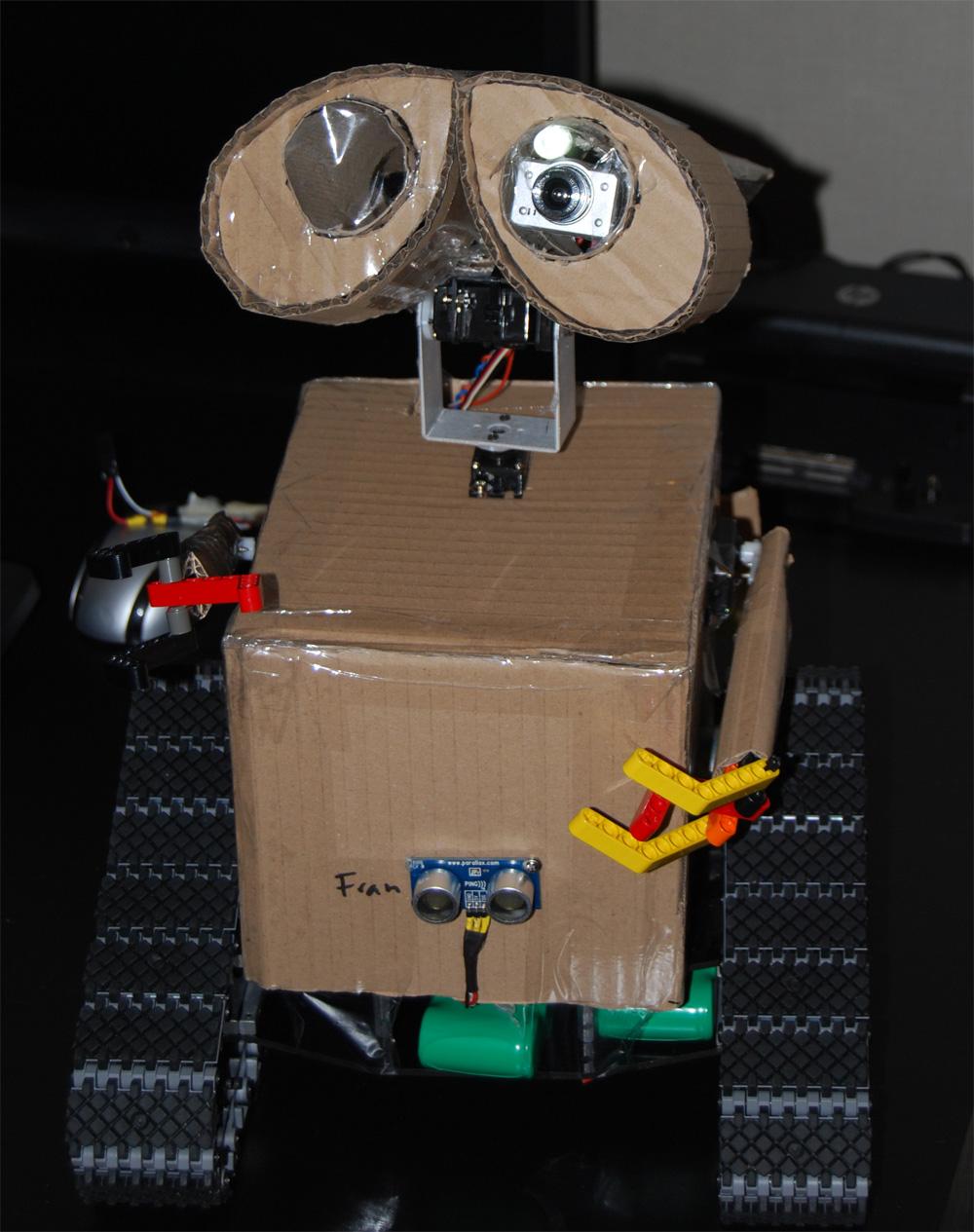
Henrik's Cardboard Wall-E!
DIY Wall-E cardboard prototype with tracks, pan/tilt head and arm, camera eye, LED light, distance & temp sensors,...

Andy's Antonn
Antonn robot prototype moves, speaks and reacts to 30+ voice commands, tracks with nose camera and moving eyes, controls...

The ping roam script I wrote may work better than the radar control - it's been a while since I used it but the latest one had boxed in escape routines in it and should he pretty simple to customise too. I think it may still go in circles but throwing in a few more ifs could easily solve that. I've been meaning to get back on to that for some improvements so if you do try it any suggestions on it would be welcomed.
Copy & paste it from here or from the cloud.
A simple op-amp based current monitor circuit on one of the ADCs should detect if he is stuck anywhere and sensors haven't picked up on in, or a bumper switch around the edge of him maybe?
As for unable to connect to bluetooth, I have that problem on occasion and haven't solved it yet. Power cycling seems to solve it though, but one thing I have noticed is if I power cycle and when plugging the battery back in I miss or slip so it powers it for a fraction of a second, breaks the power and then re-energises it the bluetooth wont connect until I disconnect the power again, leave it for a few seconds and reconnect.
@Josh ..I really liked your vid because it shows real world testing! I think the robot was working a area that really needs it . and not trapped! I was thinking a solution with more IF's in a script as Rich suggested like after not going straight after a number of predetermined turns to send an alarm either audible or flashing lights.
@Josh and @Rich The issue of the bluetooth stalling and subsequent power cycling to bring it back happens to a fair number of people....which brings me back to the Watchdog timer thread I start and replied to by Rich with very good ideas. Can the bluetooth "lockup" be remotely solved with an external watchdog timer circuit that can power cycle the EZ-Board? ! just my thoughts
and not trapped! I was thinking a solution with more IF's in a script as Rich suggested like after not going straight after a number of predetermined turns to send an alarm either audible or flashing lights.
@Josh and @Rich The issue of the bluetooth stalling and subsequent power cycling to bring it back happens to a fair number of people....which brings me back to the Watchdog timer thread I start and replied to by Rich with very good ideas. Can the bluetooth "lockup" be remotely solved with an external watchdog timer circuit that can power cycle the EZ-Board? ! just my thoughts
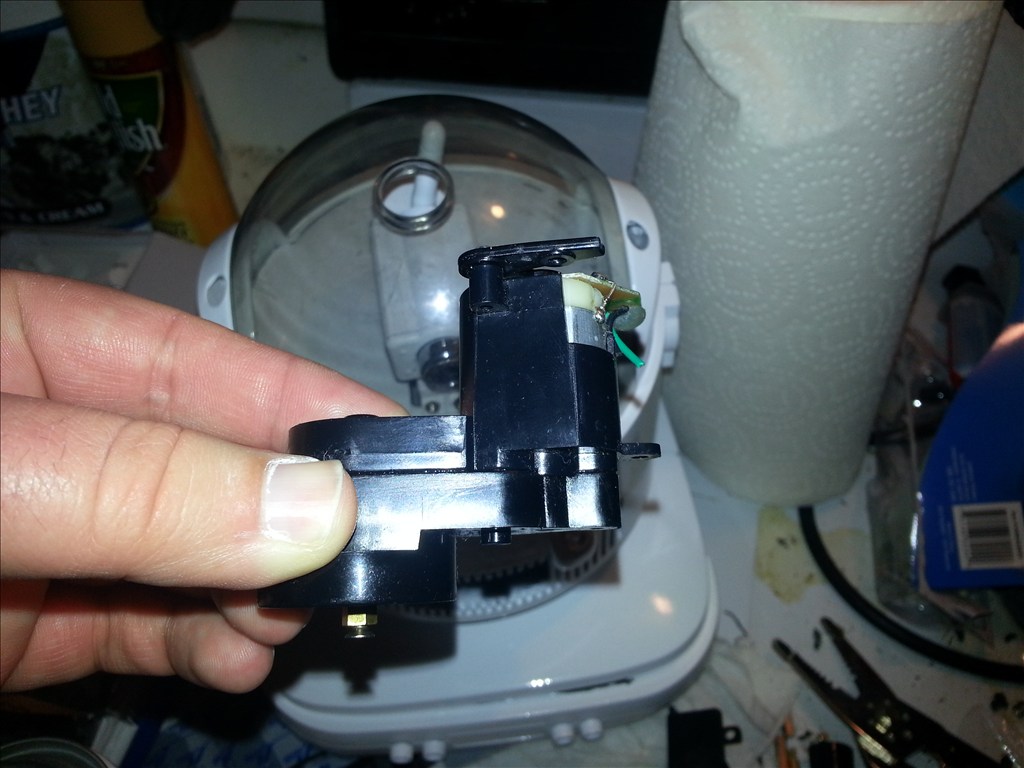
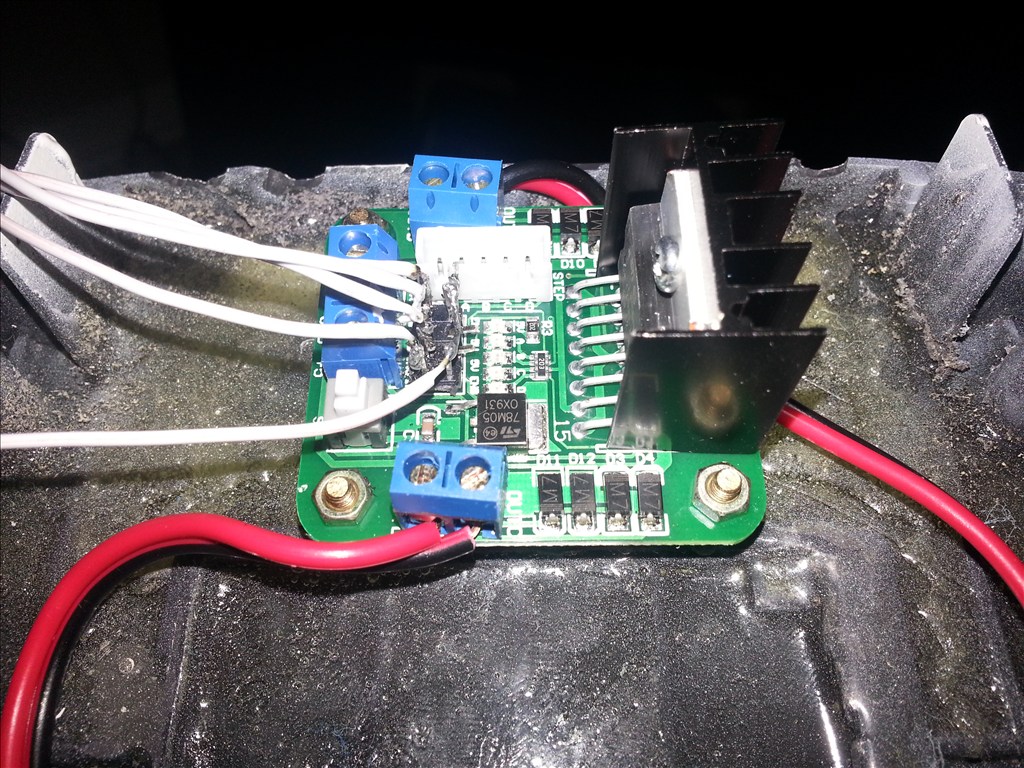
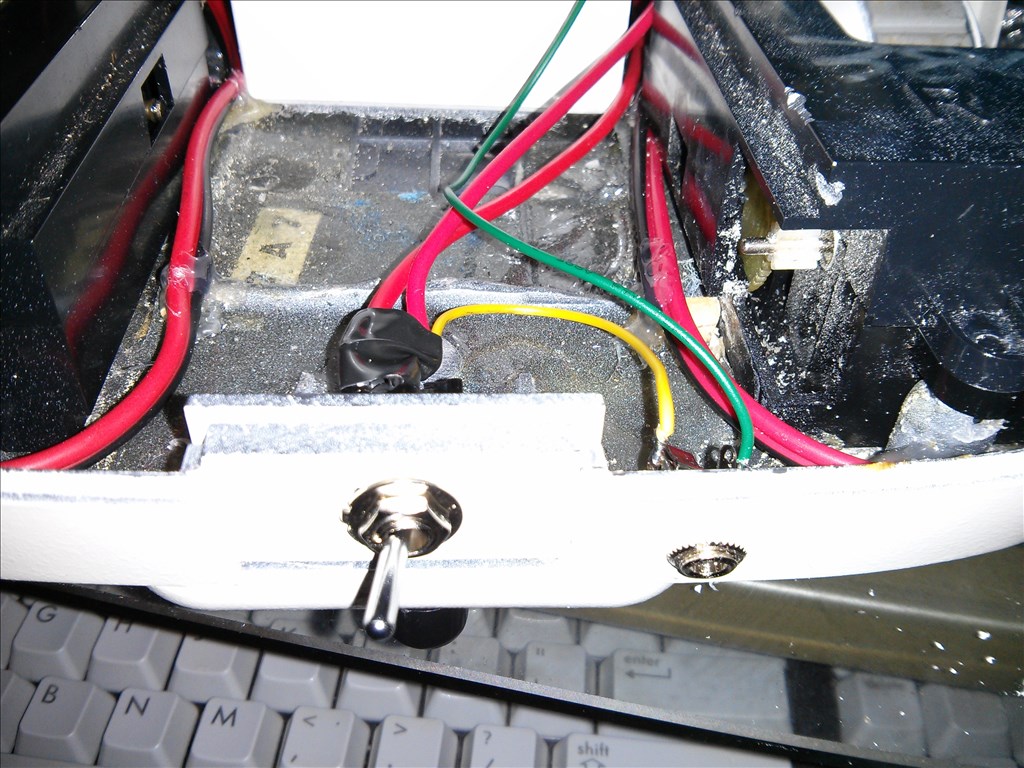
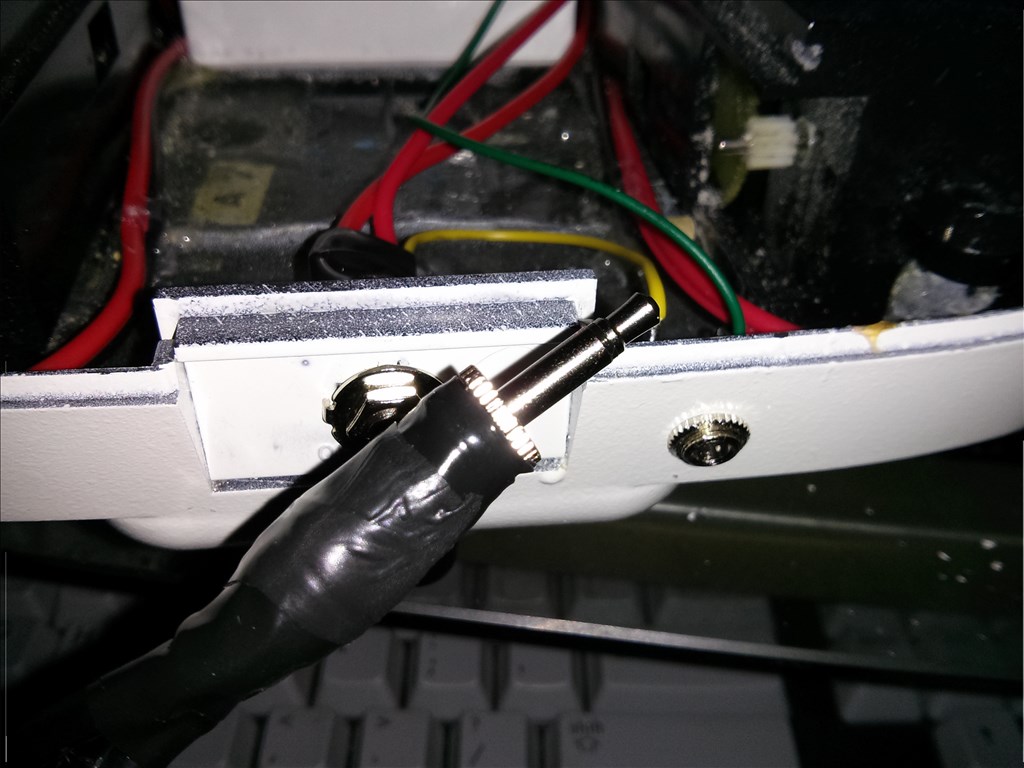
OK so I added a circuit that connects to this 3.5mm headphone jack as a charger. I am using a digital Schumacher 1.5 a 6 volt charger.
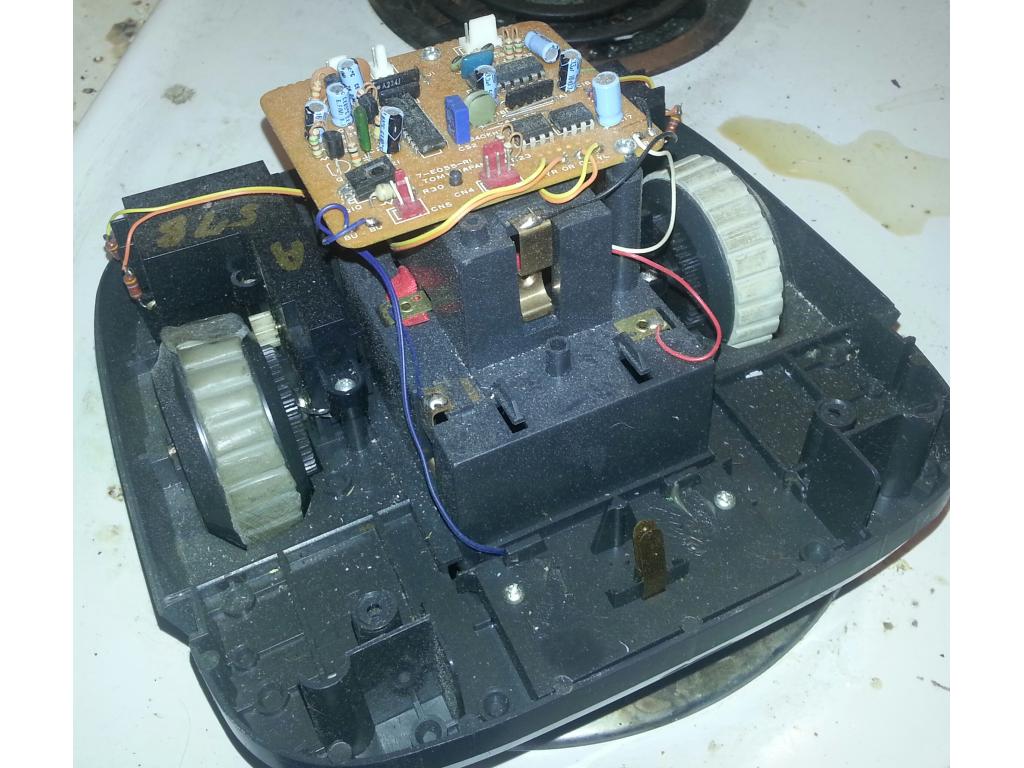
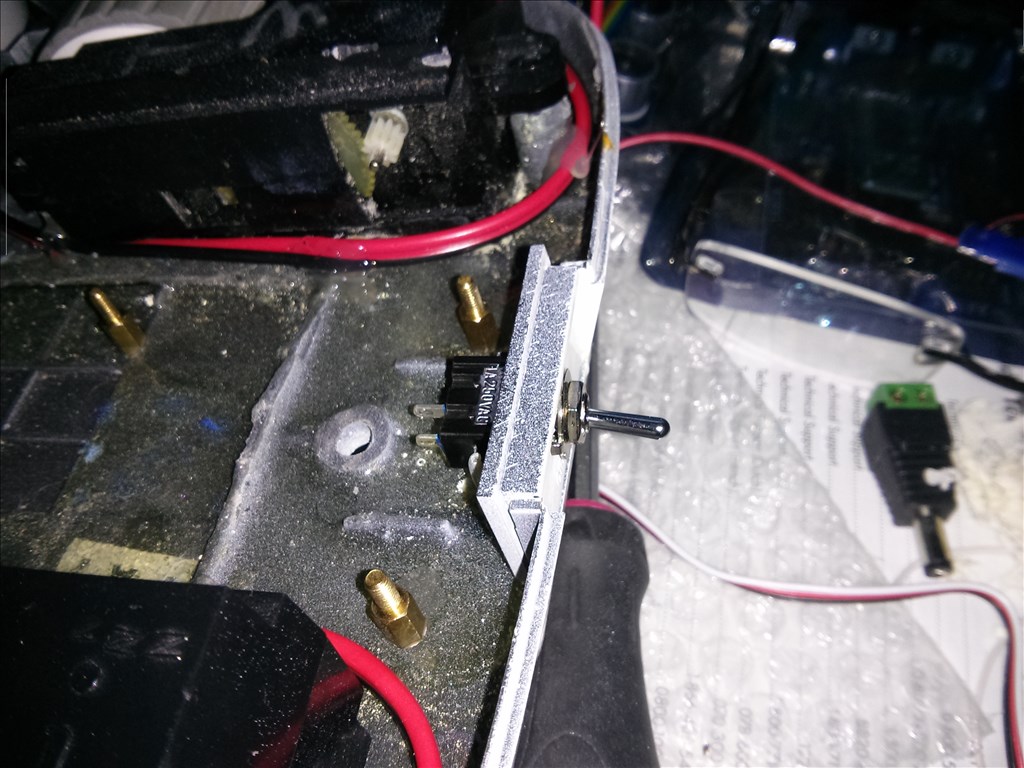
Alright , I'm charging up this battery right now. In the mean time does anyone have a for sure ADC circuit schematic or drawing that I can use to detect the motors stalling? Once I make that sensor I will start playing with Rich's example to see what we can so to make this an effective little robot.
Playing with IR sensors right now while the battery.is charging. I'm thinking of simple ways that the robot can identify its trapped or in a tight spot and back up. Also I need it not to take a trip down the stairs lol.
Have you tried the circuit DJ put up a while back? Thread link
Hmmm, well at second look it isnt as clear a circuit as you needed. I will look around for a better reference unless someone else has one already.
Thread link
Hmmm, well at second look it isnt as clear a circuit as you needed. I will look around for a better reference unless someone else has one already.
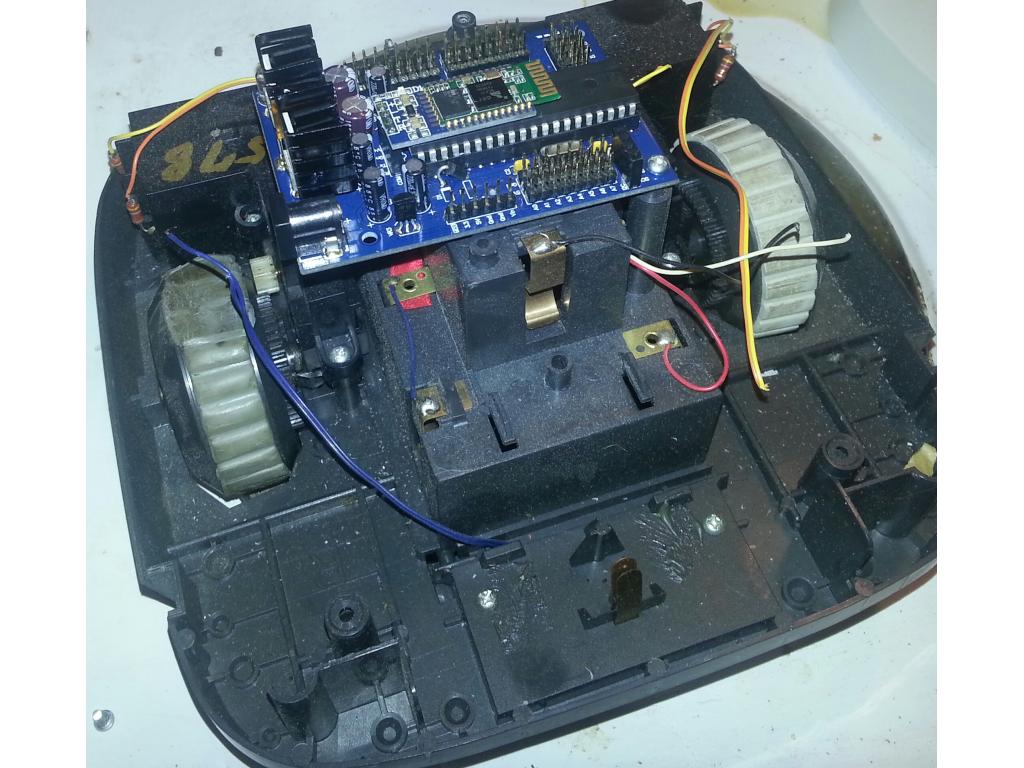
Josh, does your H-Bridge have a current sense pin? Some boards like the Dagu Rover 5 Motor Driver Board has one.
www.sparkfun.com/products/11593
Also check this thread by DJ from last year.
synthiam.com/Community/Questions/11
I like that driver board. Great if youre going with 4 drive motors. I will bookmark it. Thanks!