










































































































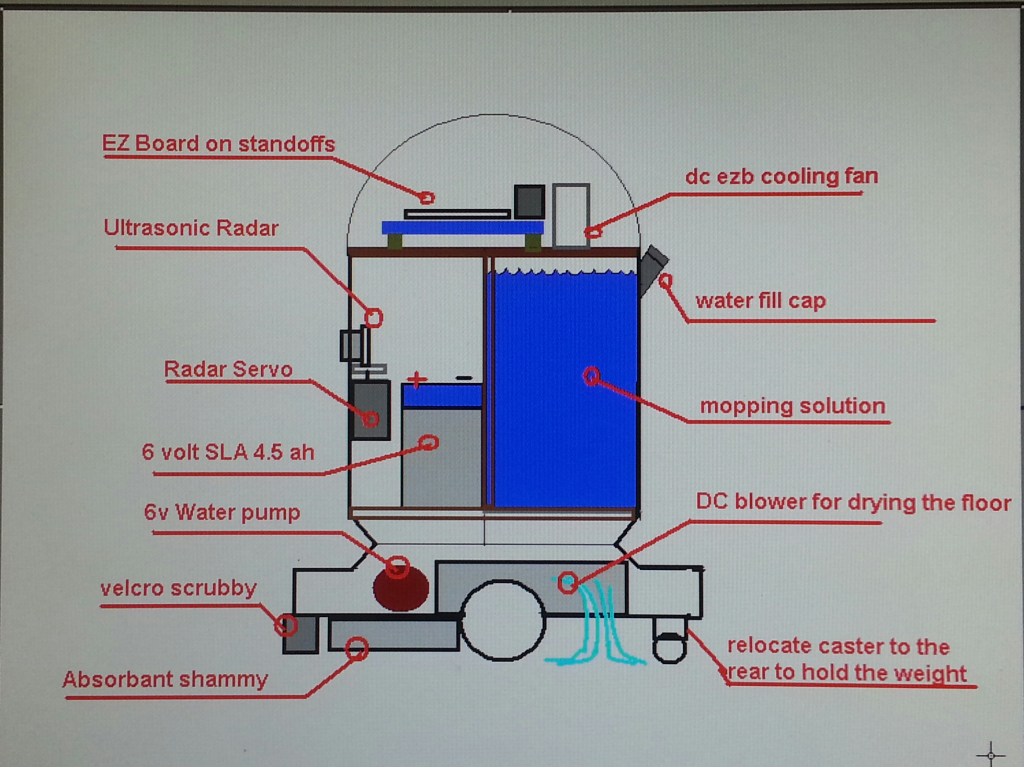


























This is a simple project that hopefully I wont over complicate. Since he Squeegee needs to get as close to furniture and the toilet and bathtub as possible this my be a challenge. After all we spend most our time trying to get our robots to avoid the objects in the room. Im giving new life to a radioshack robie jr rc controlled robot.

By jstarne1
— Last update
Discover more robots

Tfitzrandolph's Custom Robot Build Wobble Frog
Wobble Frog robot toy built with EZ-Robot IoTiny, LIPO and 270 servos, controlled via Synthiam ARC scripting to create...
Pashley's Ez-Bo, My Experimenting Robot
Build a Boe-Bot-based experimental robot with Easy Builder and script language, featuring servos, sensors, RGB LEDs and...

Rb550f's This Iq My Personal Robot
IQ proof-of-concept robot: 4.5ft with telescoping camera head, Windows 8.1 chest tablet, EZB4 client mode, servo...

https://www.youtube.com/watch?v=NnioK7sg2s4&feature=youtube_gdata_player
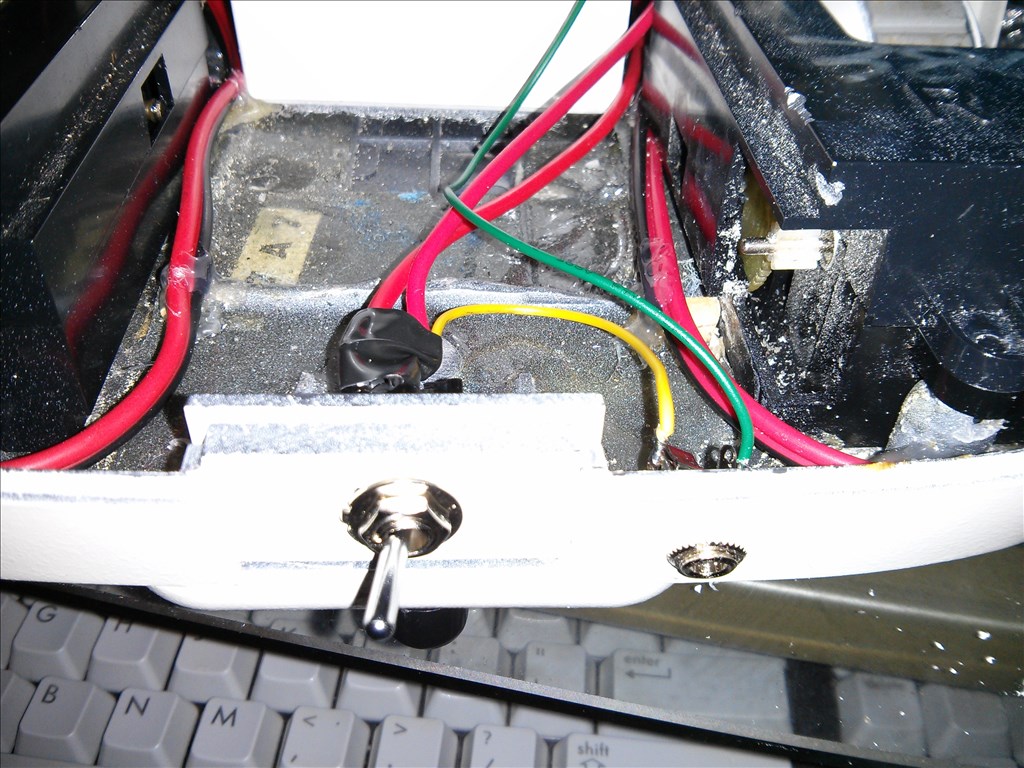
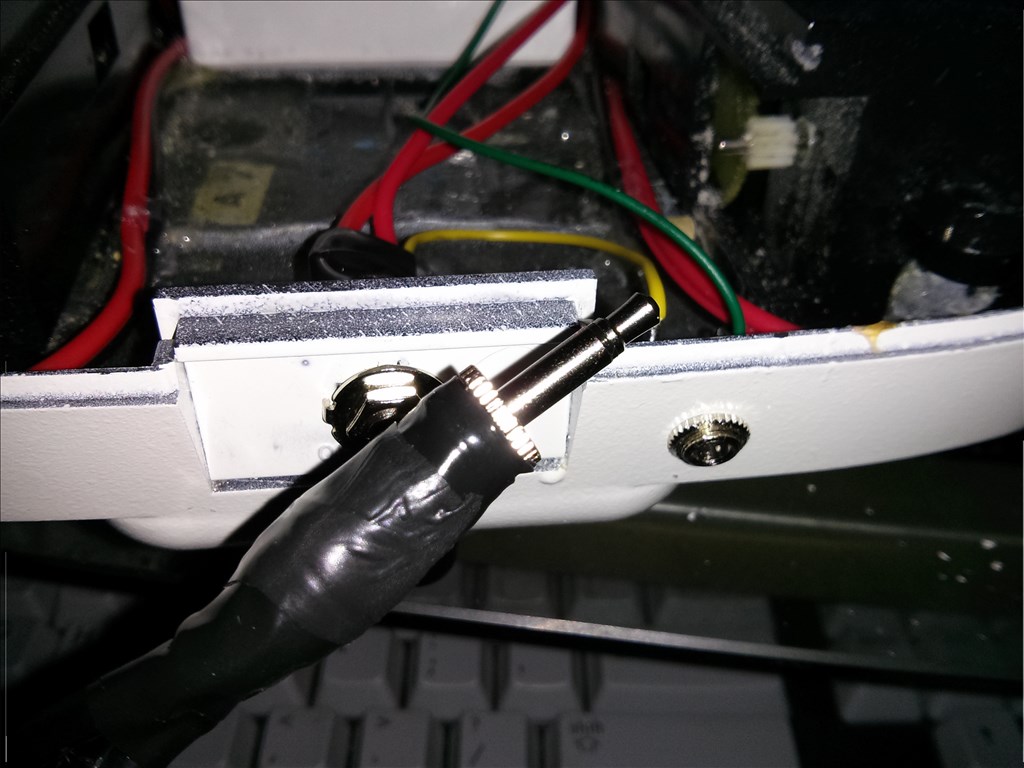
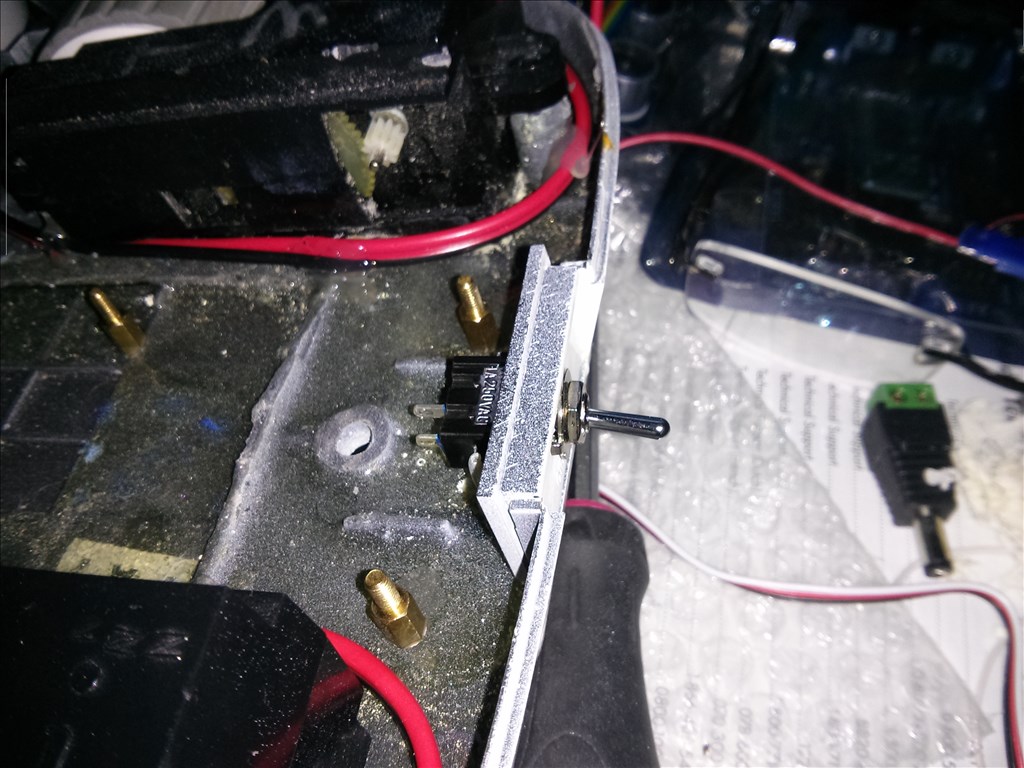
Showing how I did my connections... https://www.youtube.com/watch?v=iZyv6MeYIWA&feature=youtube_gdata_player
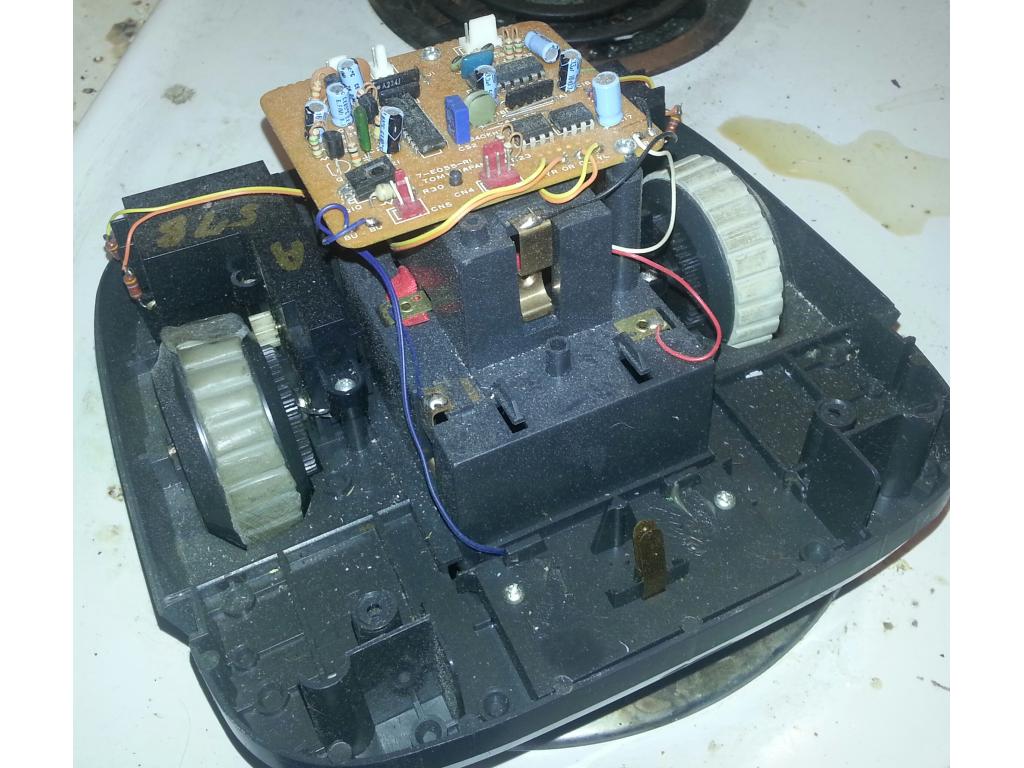
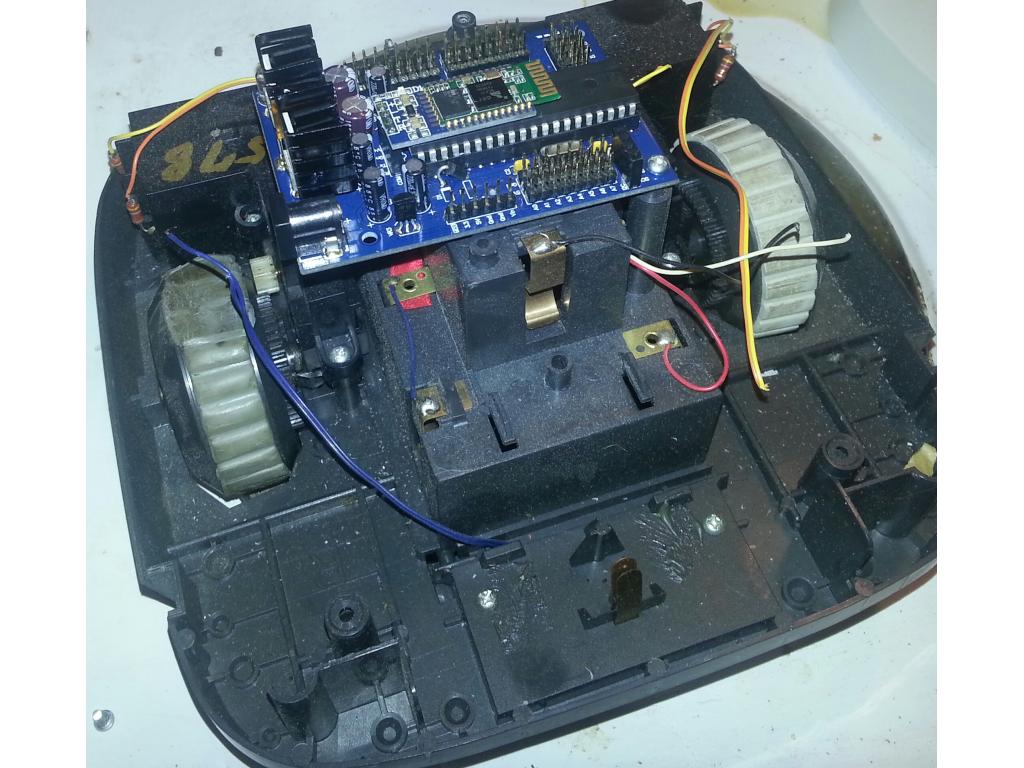
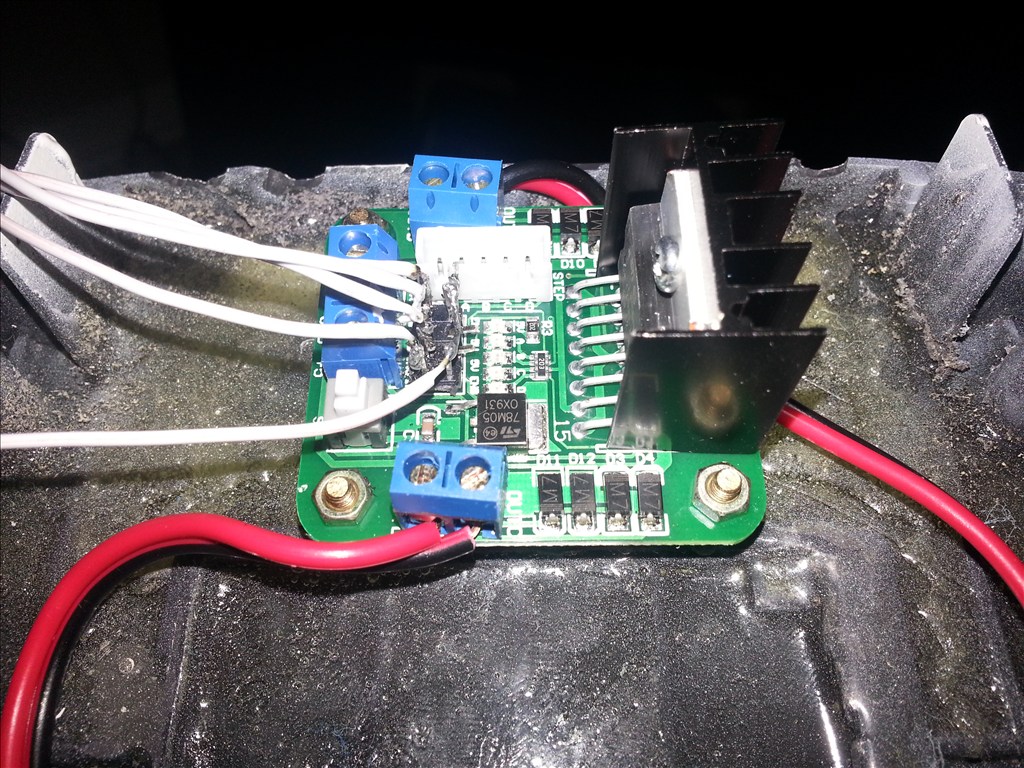
First movement from replaced h bridge , now I just gotta figure out the configuration and reverse polarity on one of the motors and I should be good. I will update once they move as desired and add pwm control to slow dude down a bit.
JOSH what happen to your omnibot 2000 project ,no updates for a very long time
I want to get time sensitive things working first. Squegee , the three battle bots then Jarvis gets some love.
JARVIS is upset with you i think
YesYes he is lol. But my roommate who just moved out made a point that hit me in my gut. None of my projects are autonomous yet. So my goal is to get squeggee cleaning first then the battle bots because of the up coming faire. I'm taking my time on Jarvis he's much more than a toy for sure.
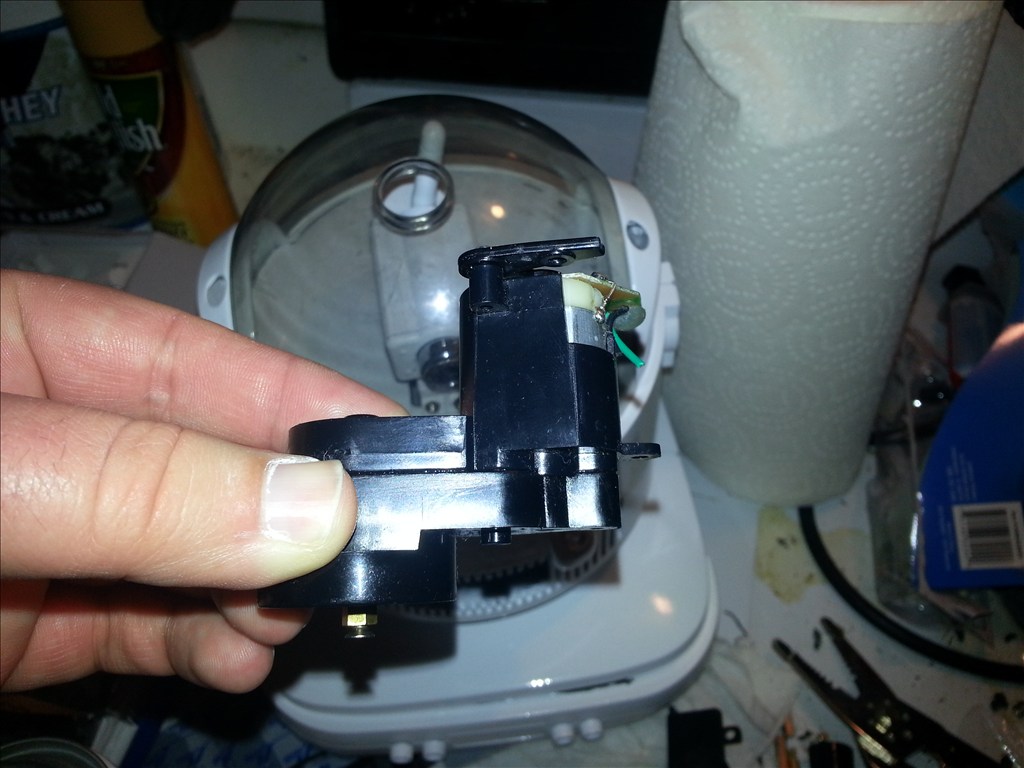
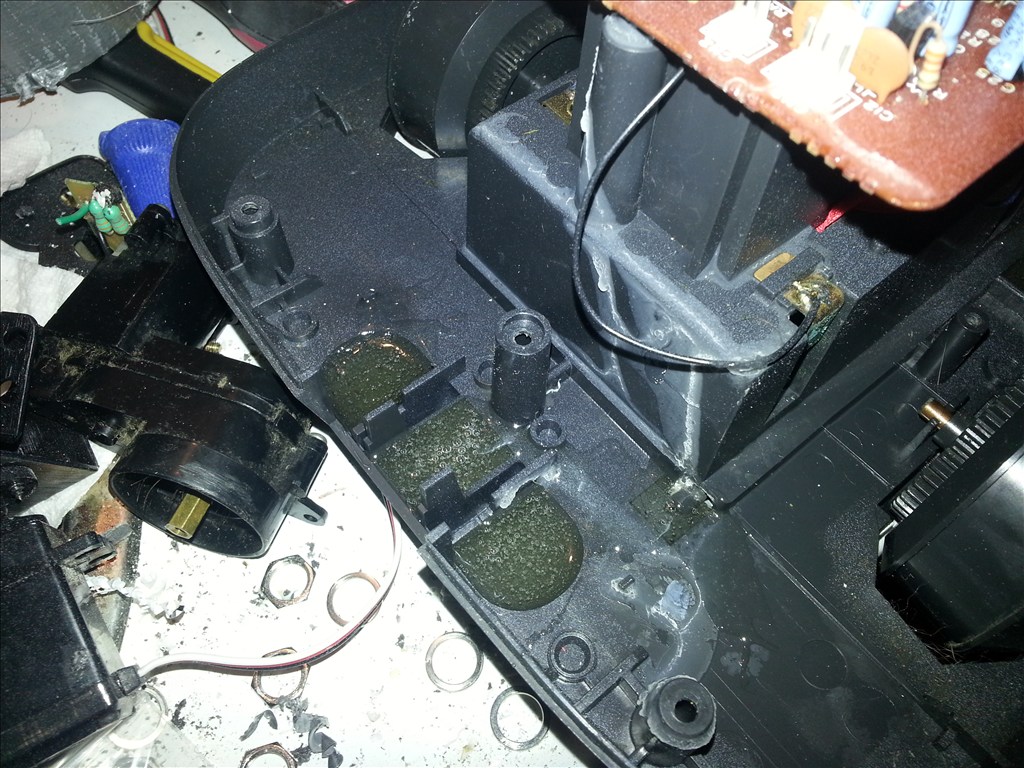
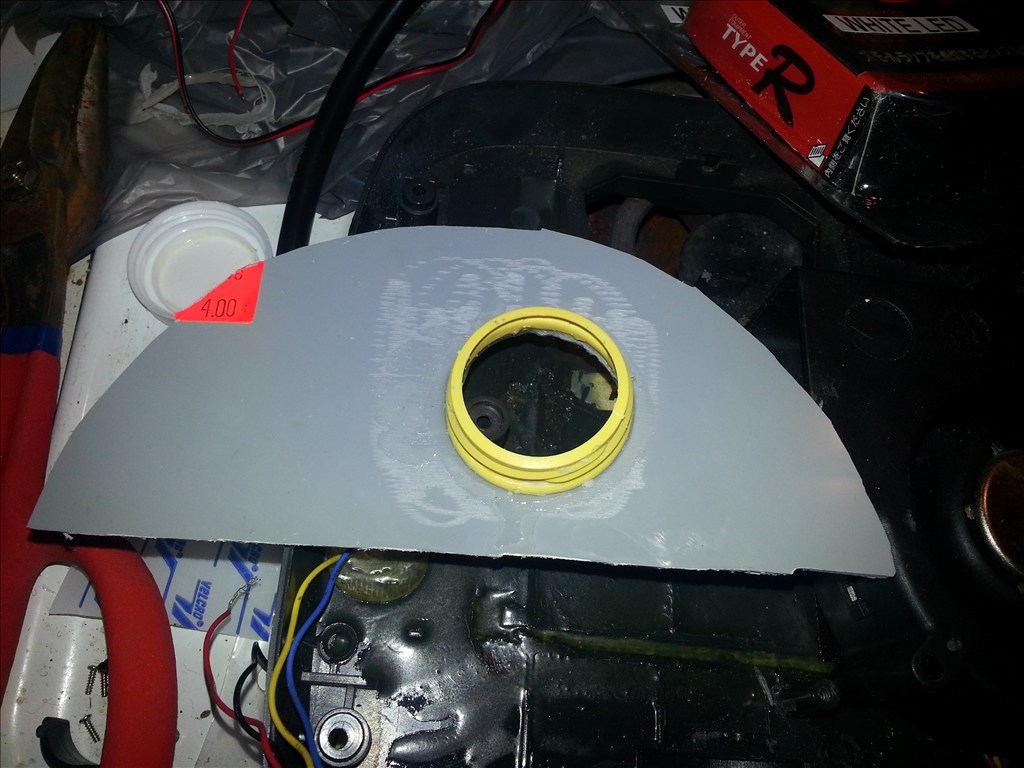
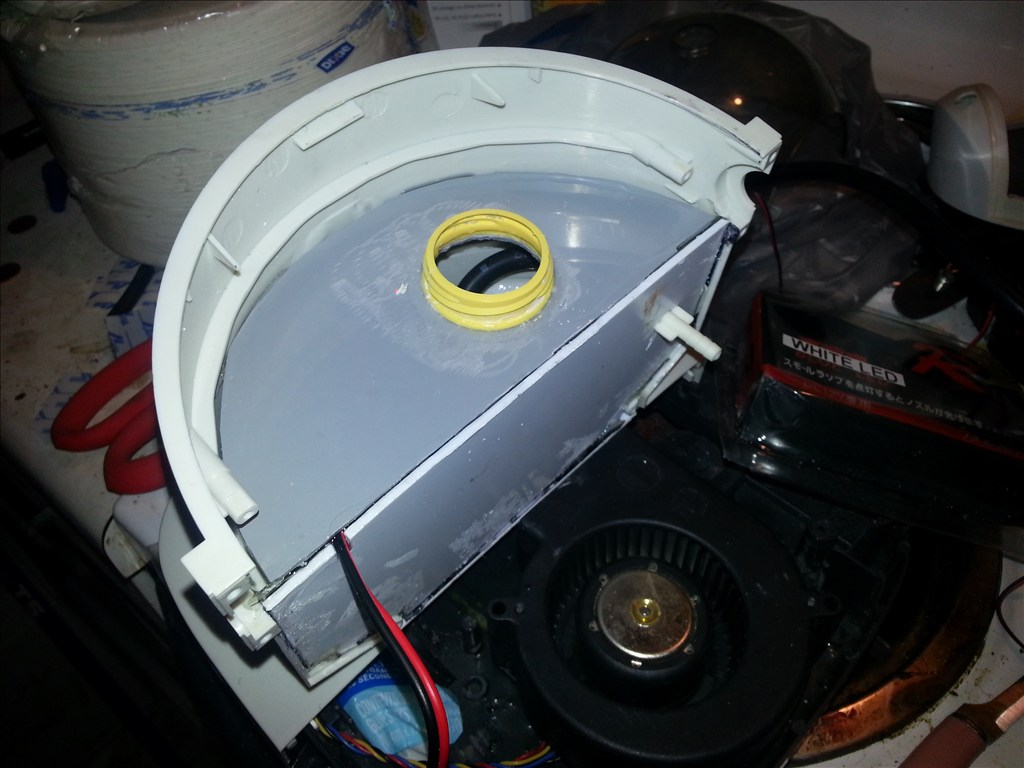
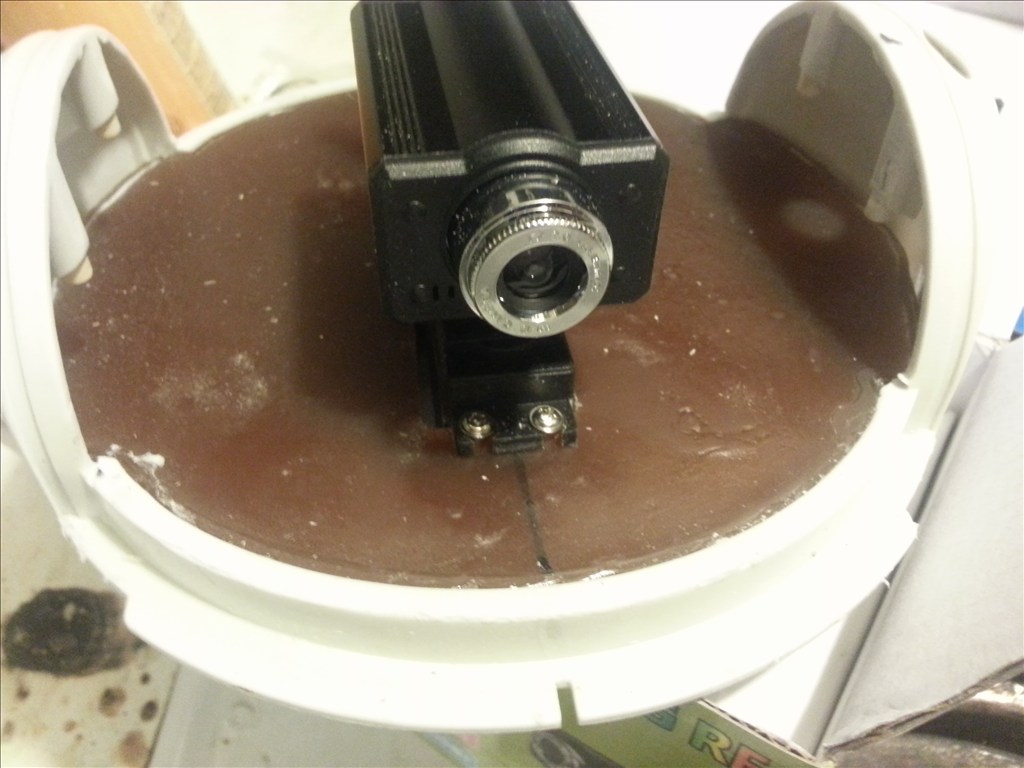
OK so I've been moved for 8 weeks and its time to get things working. I found the box the squeegee parts were in. I tested the first radar I painted white and it had an issue reading objects beyond about 8 inches... So I had to junk it. I hot glued another fresh new sensor to the servo and it was reading well. Here's a short video.https://www.youtube.com/watch?v=m7WDAC4UDMc&feature=youtube_gdata_player
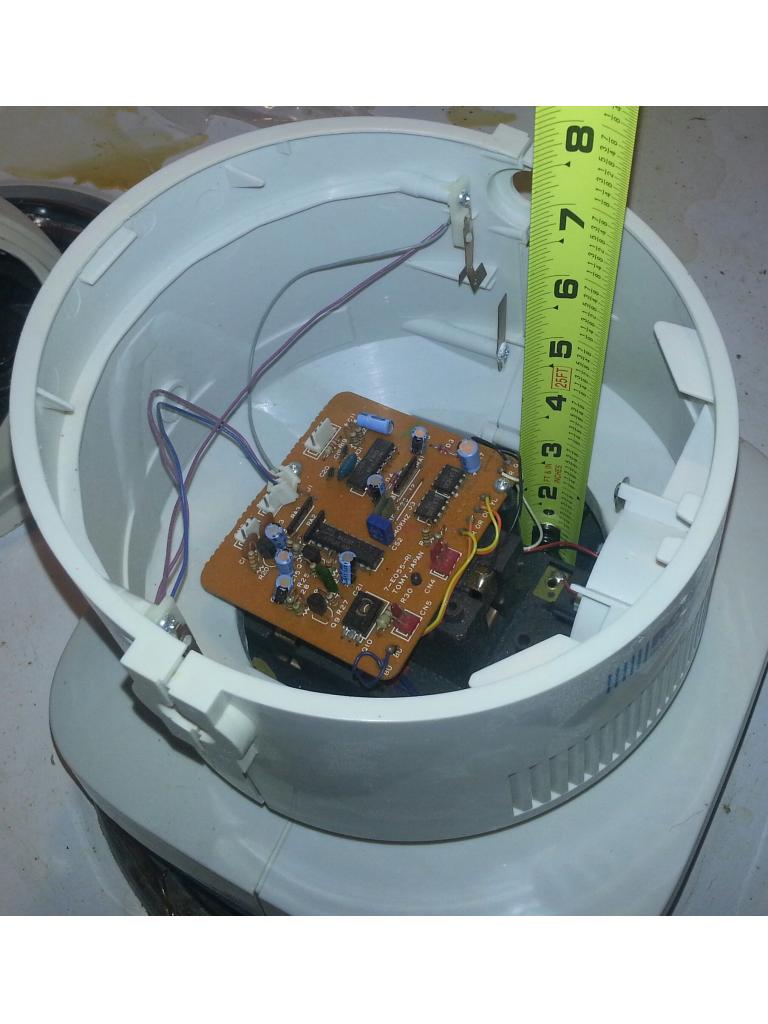
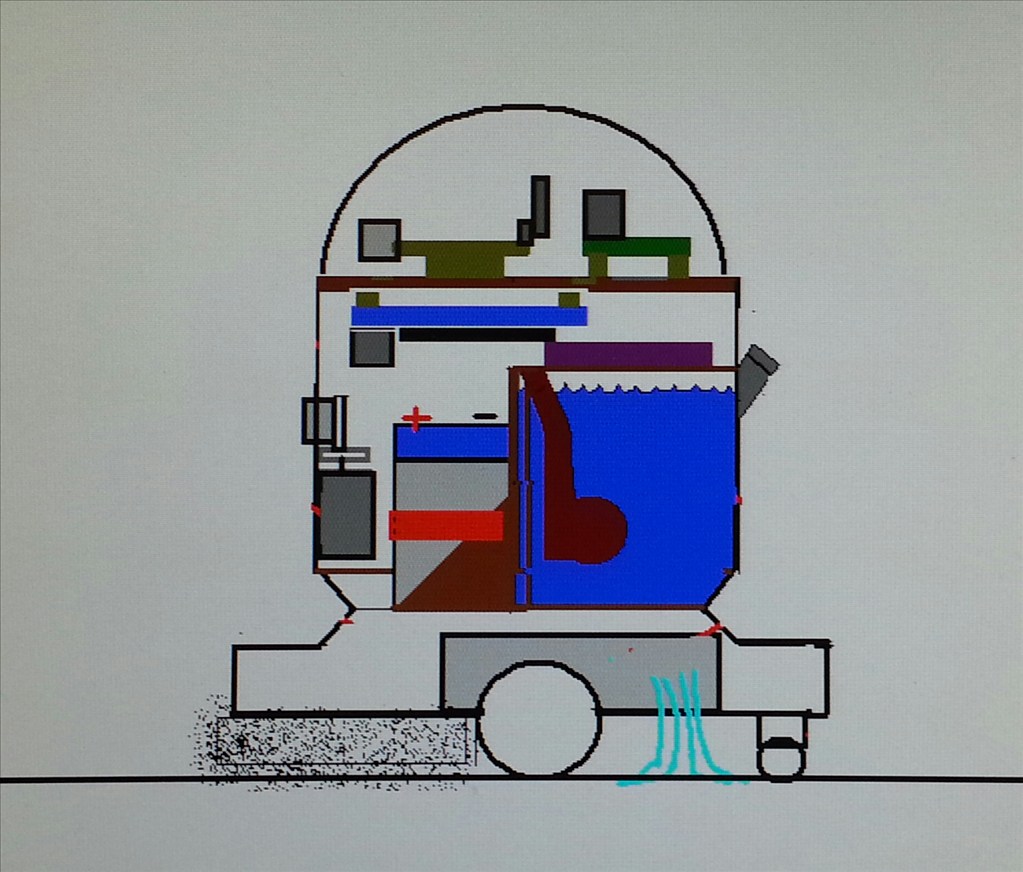
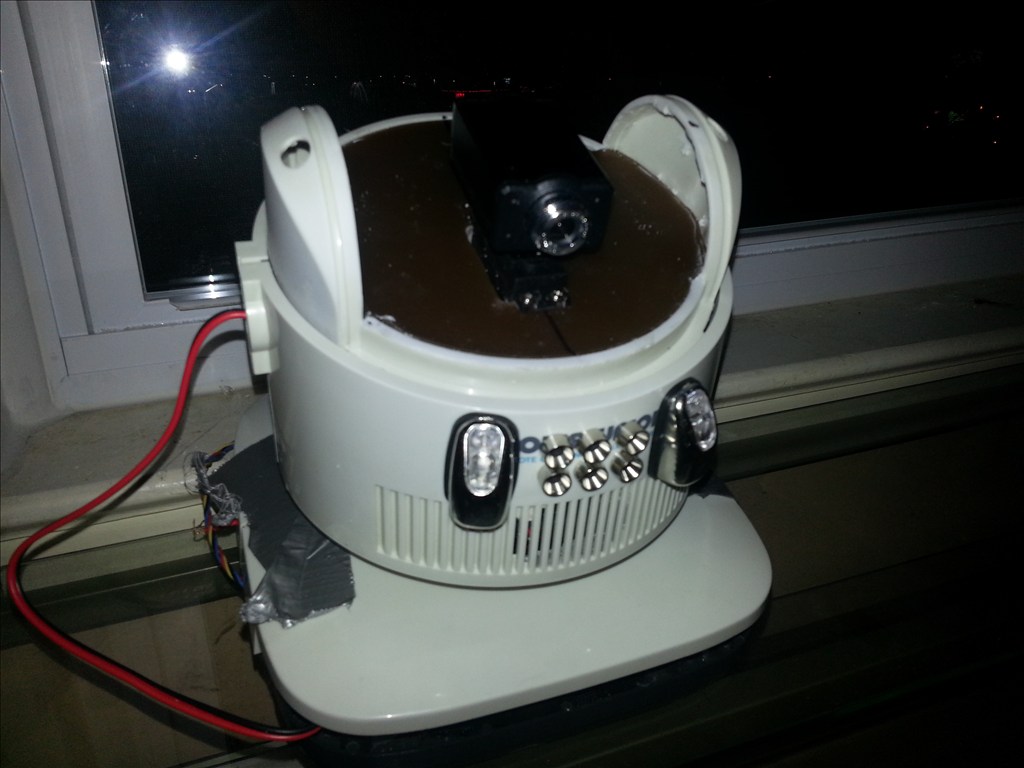
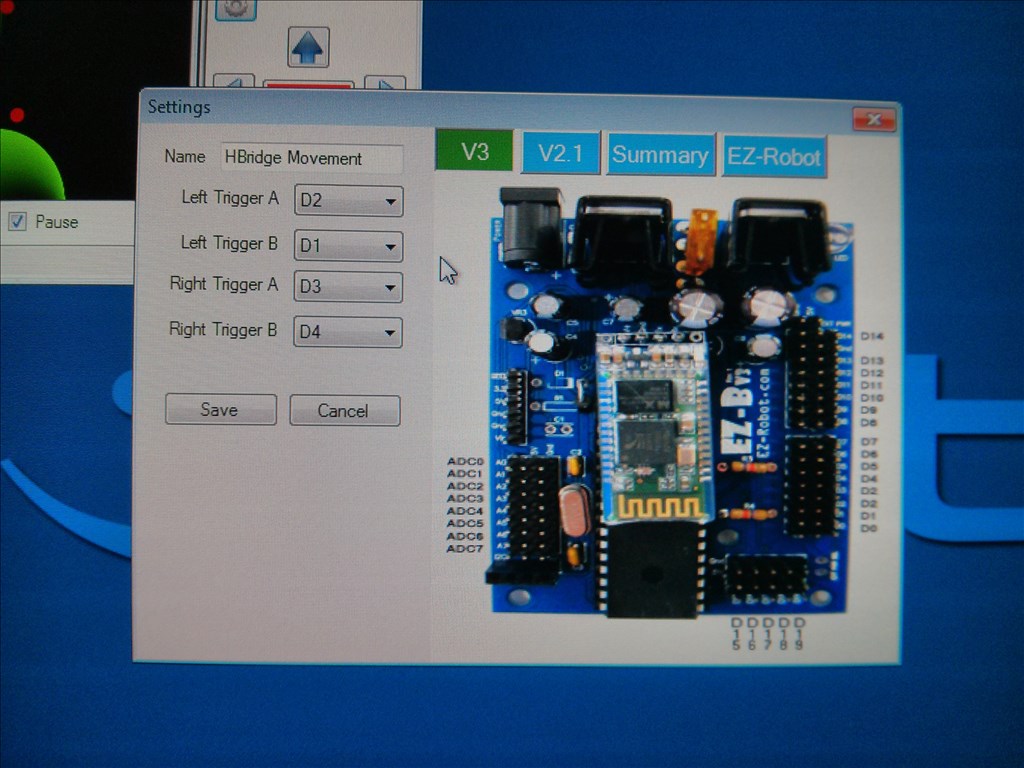
Also I have the hbridge issue fixed. I had two bridges in a row that the second channel would only go forward but not reversed. I found this was a hardware issue. The third bridge works great! Lastly I started on the camera and I honestly ask myself.... Does a mop need a camera? What do you think? I am considering just mounting ezb inside the dome and show off the electronics. As far as docking it really doesn't matter because I need to fill it with fluid and rinse the pad once a week so I can just plug little dude up to charge.
Yeah, I think the camera isn't needed. And I like the idea of the "brain" being shown off.
Josh, this little guy is so cool. I am in awe of how you can manage to fit so many things in such a small space. You are inspiring me to consider making a cleaning robot of my own.