










































































































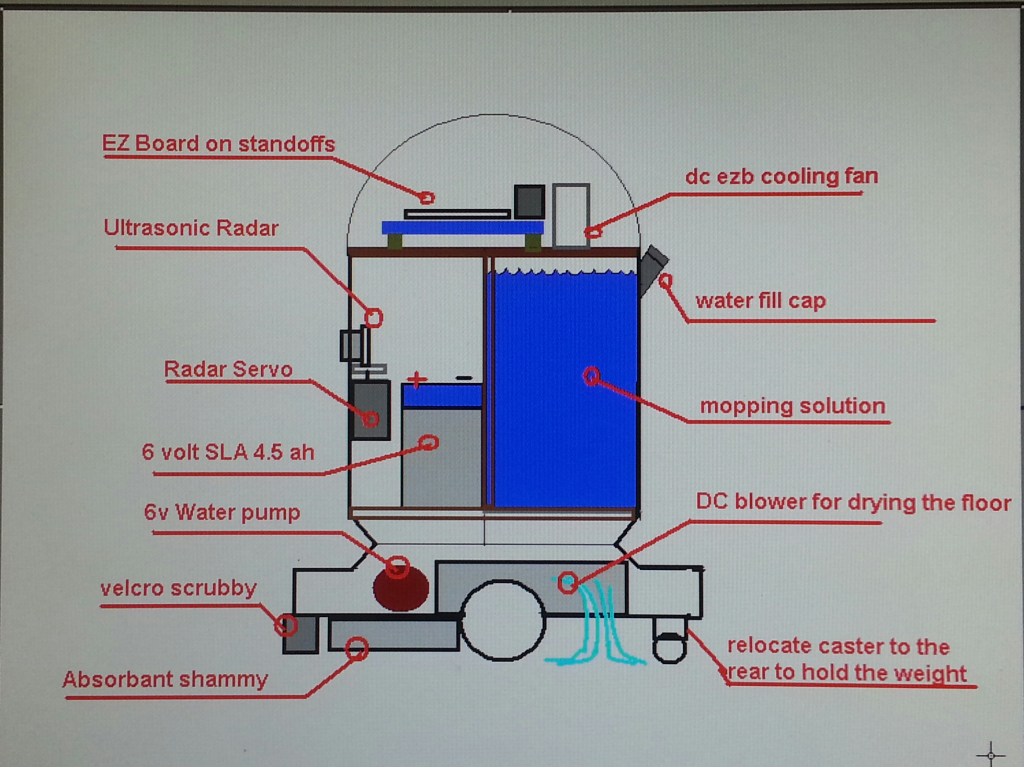


























This is a simple project that hopefully I wont over complicate. Since he Squeegee needs to get as close to furniture and the toilet and bathtub as possible this my be a challenge. After all we spend most our time trying to get our robots to avoid the objects in the room. Im giving new life to a radioshack robie jr rc controlled robot.

By jstarne1
— Last update
Discover more robots

Lsradets's EZ-Inmoov Robot Head
EZ-InMoov robot head with Synthiam 3D-printed parts and EZ-Robot electronics, programmable via Synthiam ARC for...

Louis's The Real Wall-E By Louis T
Build a lively Wall-E with Synthiam ARC: custom carbon-fiber parts, geared servos for wheels, neck and arms, animated...

Lemon's Galapagos Mode- Scorpion Tail
Tortoise bot rebuilt with short legs and a scorpion tail, showcasing custom modifications and creative design.

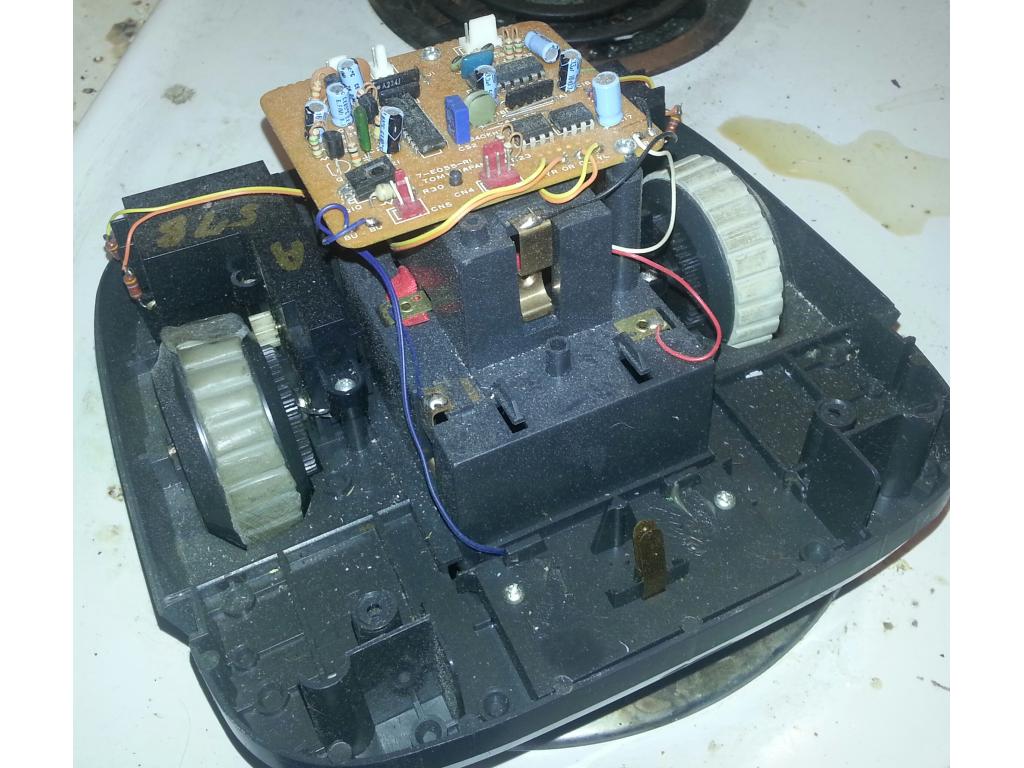
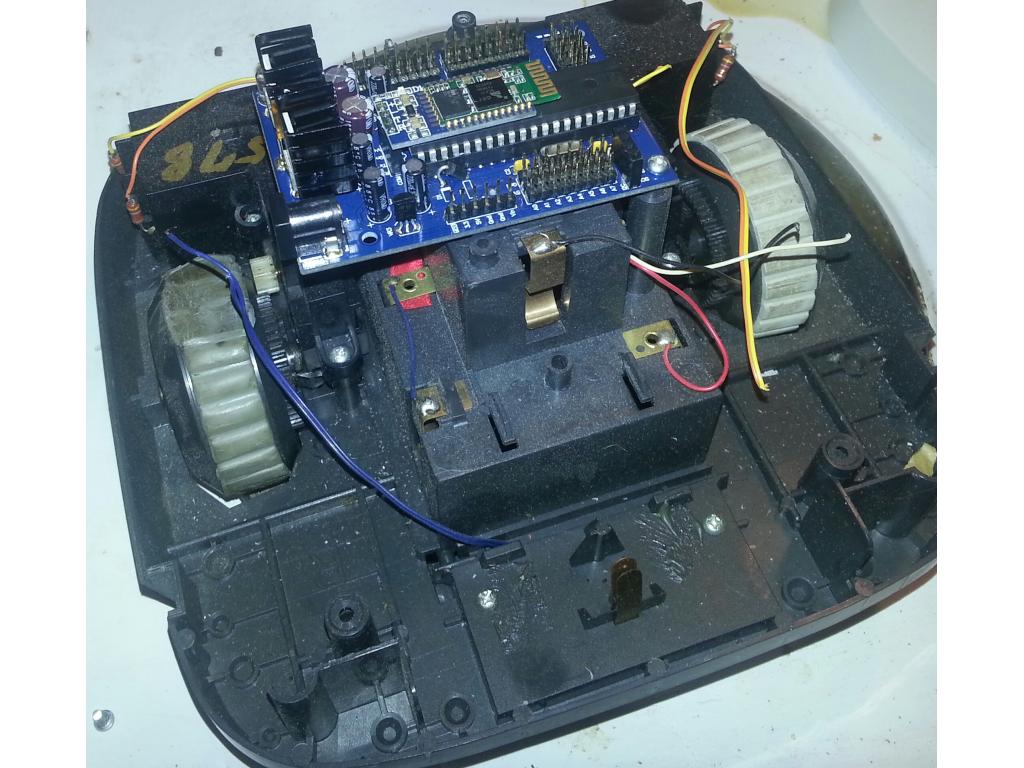
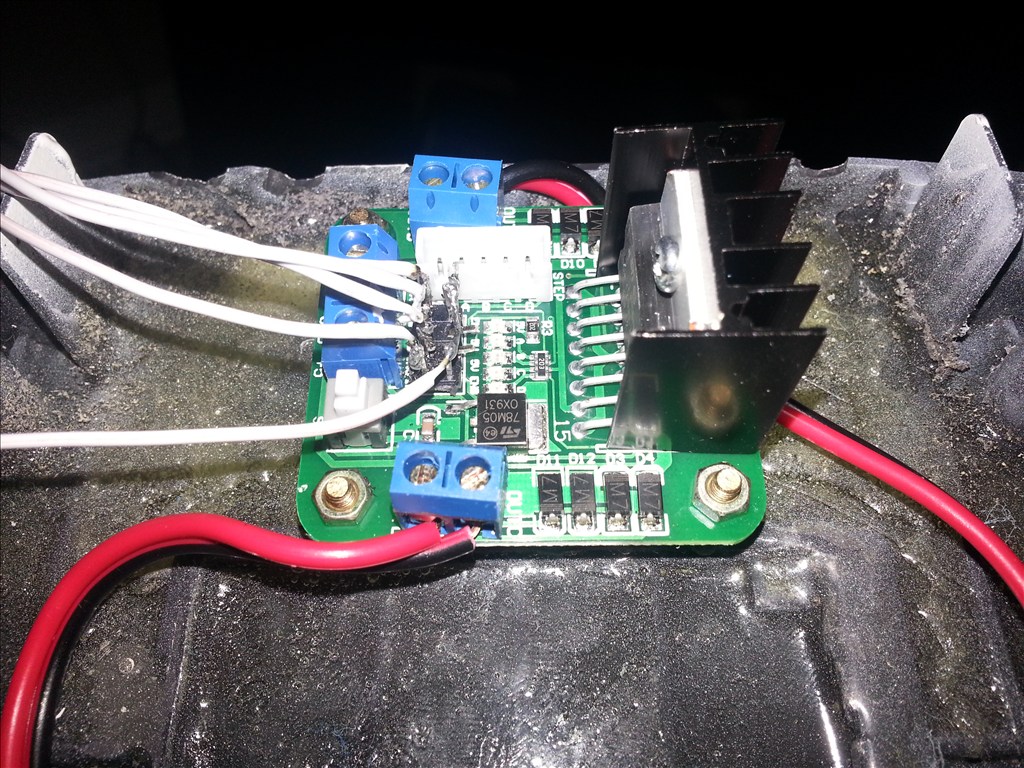
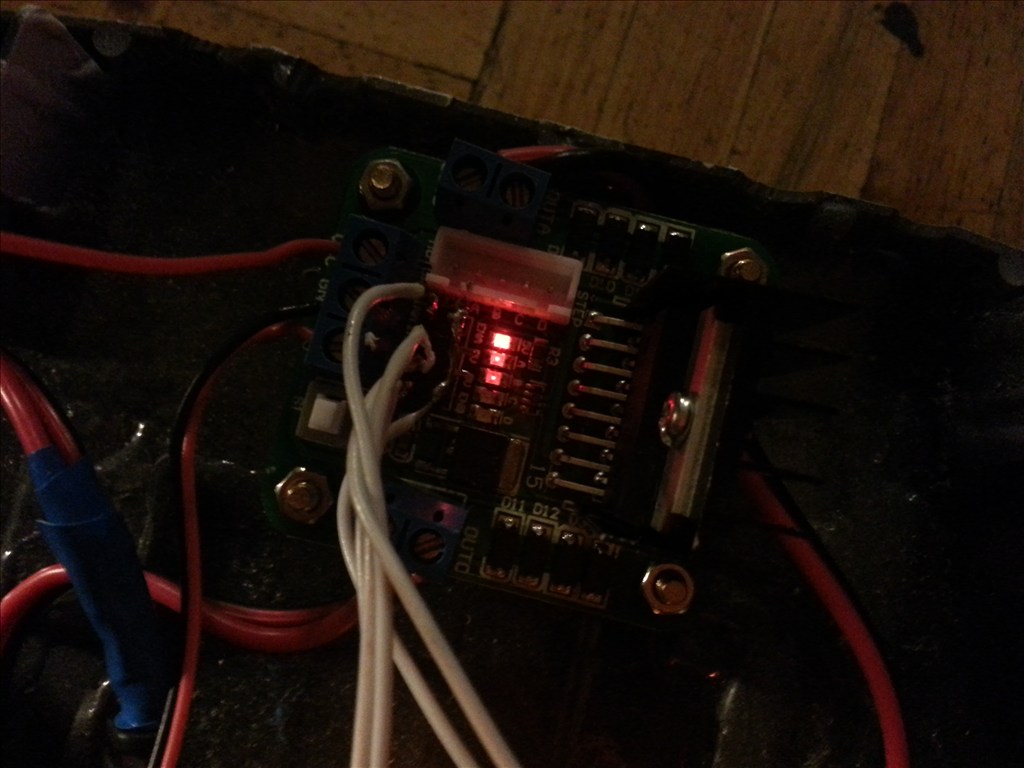
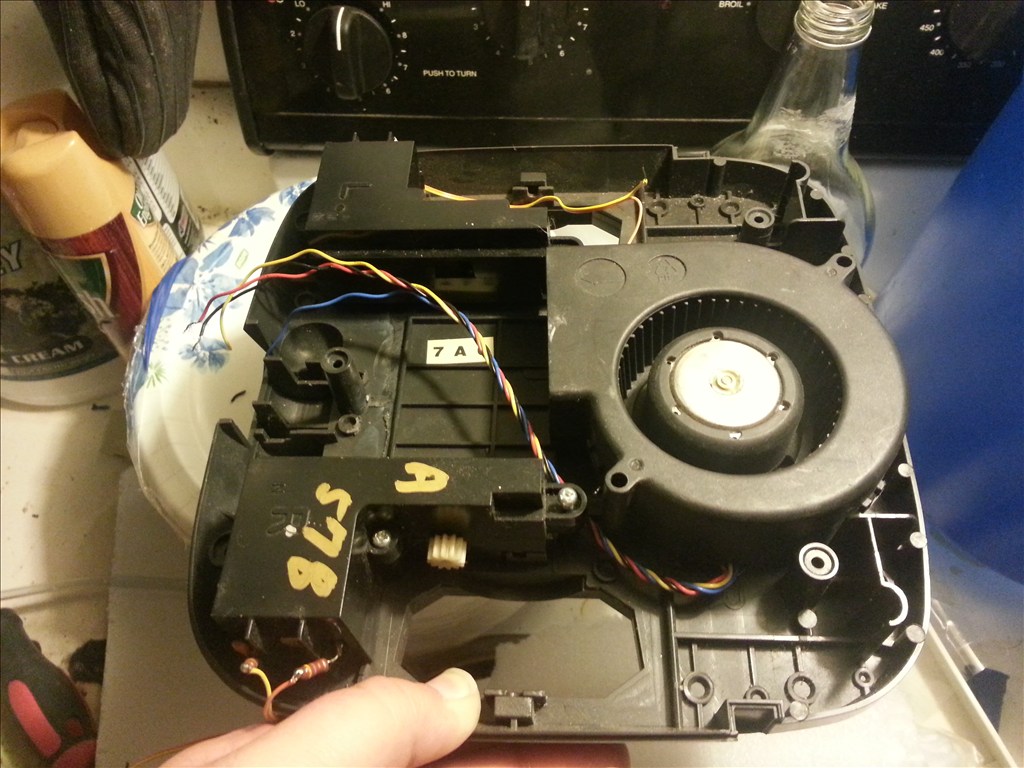
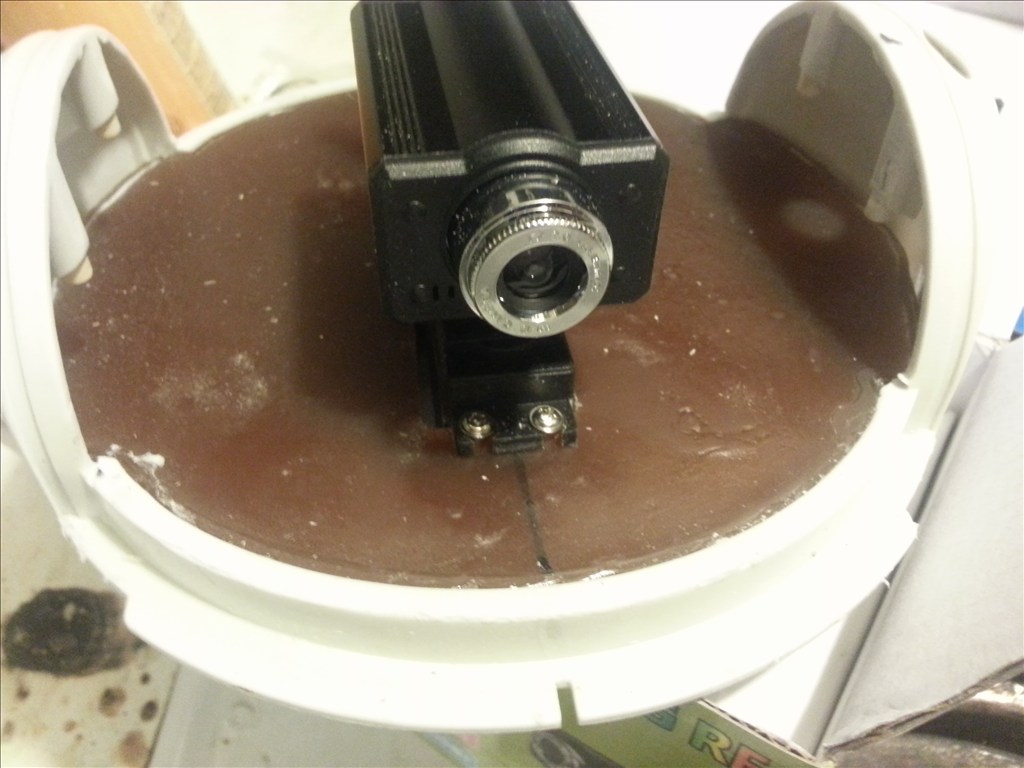
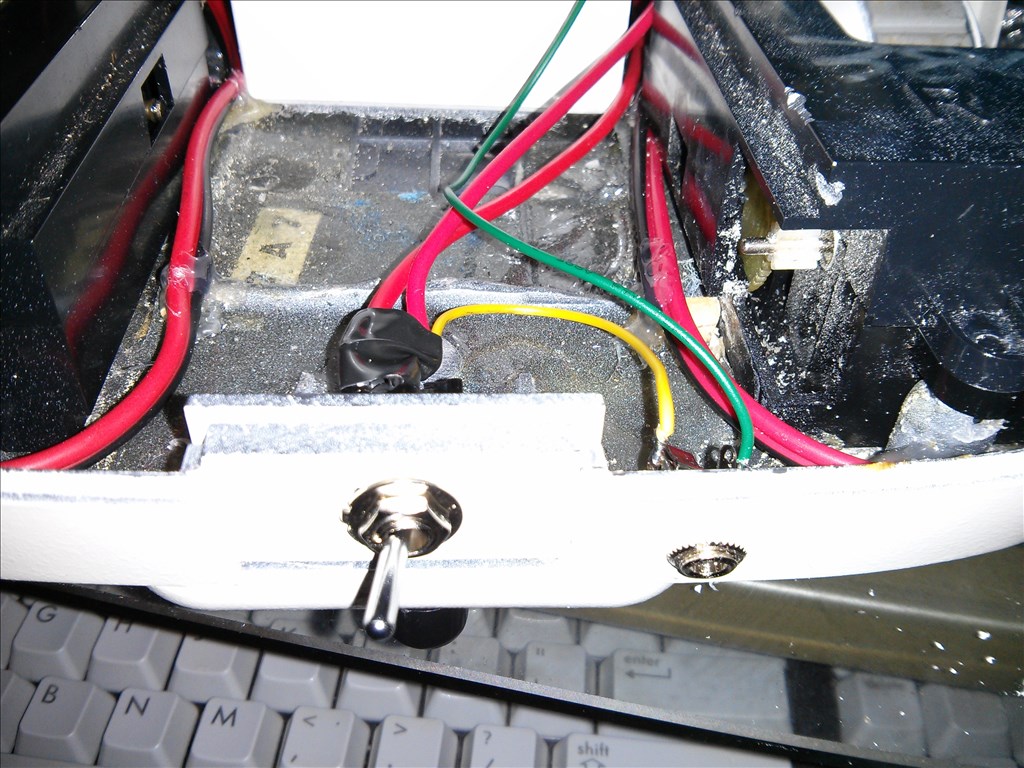
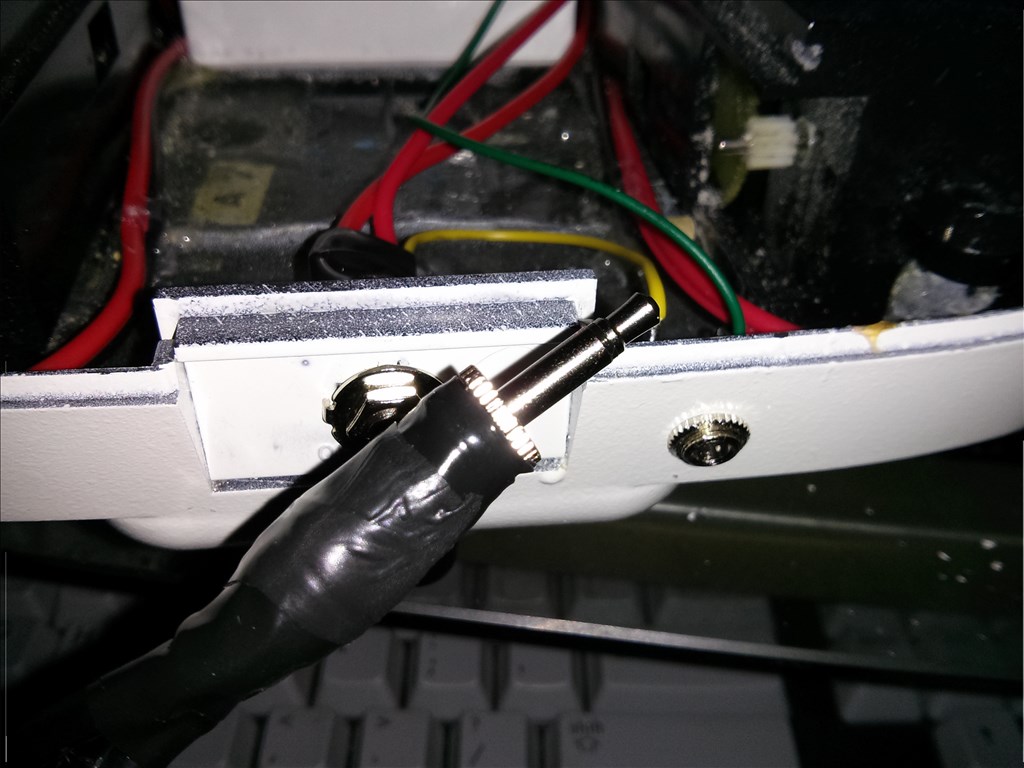
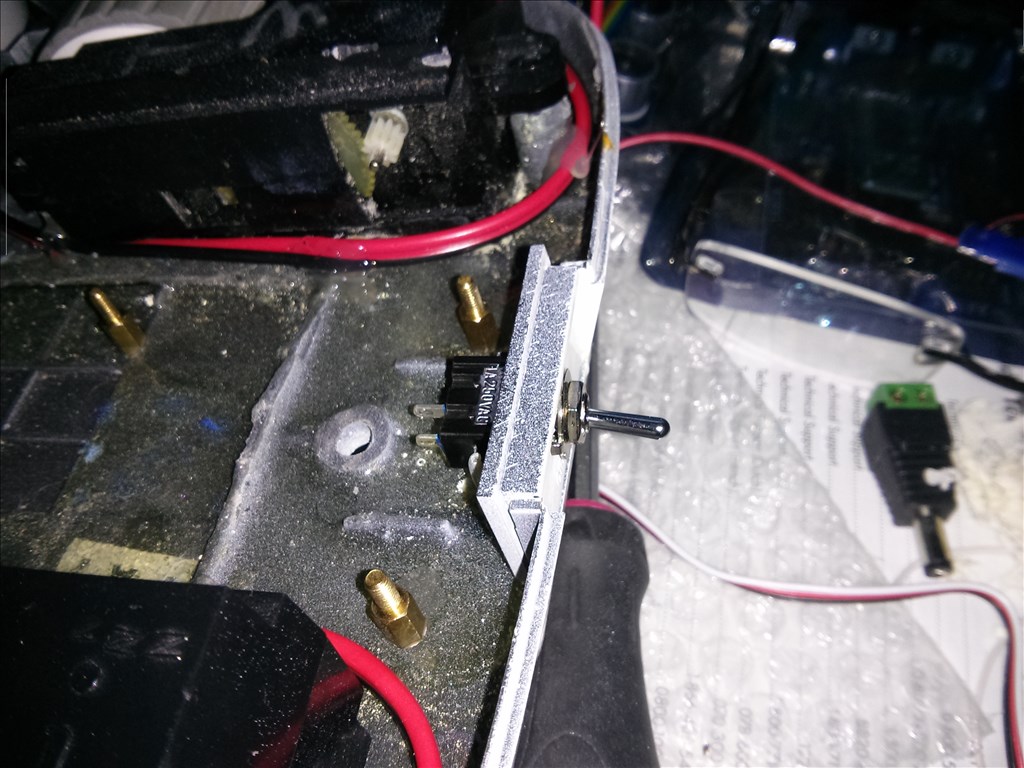
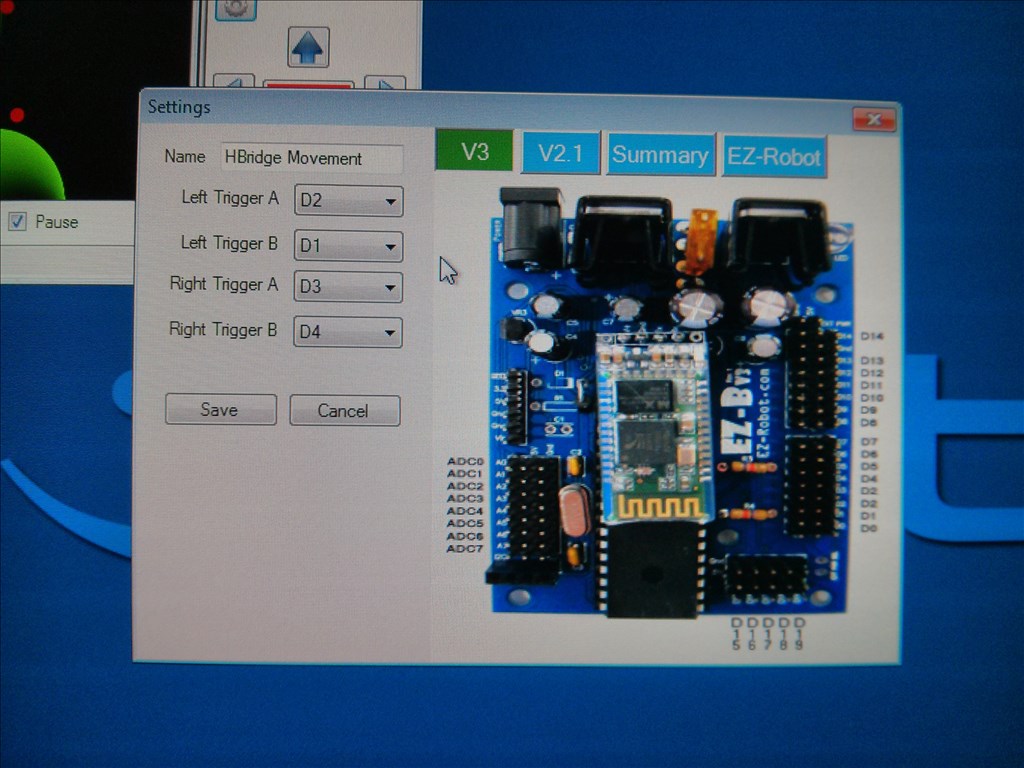
Alright after three hours of careful wire trimming , rerouting and soldering I have nearly everything hooked up and out of the way of the ultrasonic. I had to find a screw small enough to mount the horn as hot glue was not doing the job. Things are going well but my controls are inversed and I'm trying to figure out how to get them right. Forward and Reverse are working properly but right and left are swapped. How should I change the port arrangement in ARC. I didn't wanna swap the wiring because I had to cut things down to a needed length. Here's the ports arrangement now..
Its 4am here so I'm calling it a night.
As always, your work is well done!
Looking great.
As for the H-Bridge, I've answered that topic for you, read it from the top without reading the last part and see if you can work out what you have wrong before I eventually get to the answer
He's looking fantastic Josh! And Rich's answer is spot on (as always).
Honestly I don't known if I rushed but I missed the answer in the thread and rich had to simplify it :: face palm::! Lol
Thanks Bret , rich , troy and DC ! I want squeegee running so I have more to show than a fish tank that turns itself on and off. I'm home now so I will make the adjustments and test.
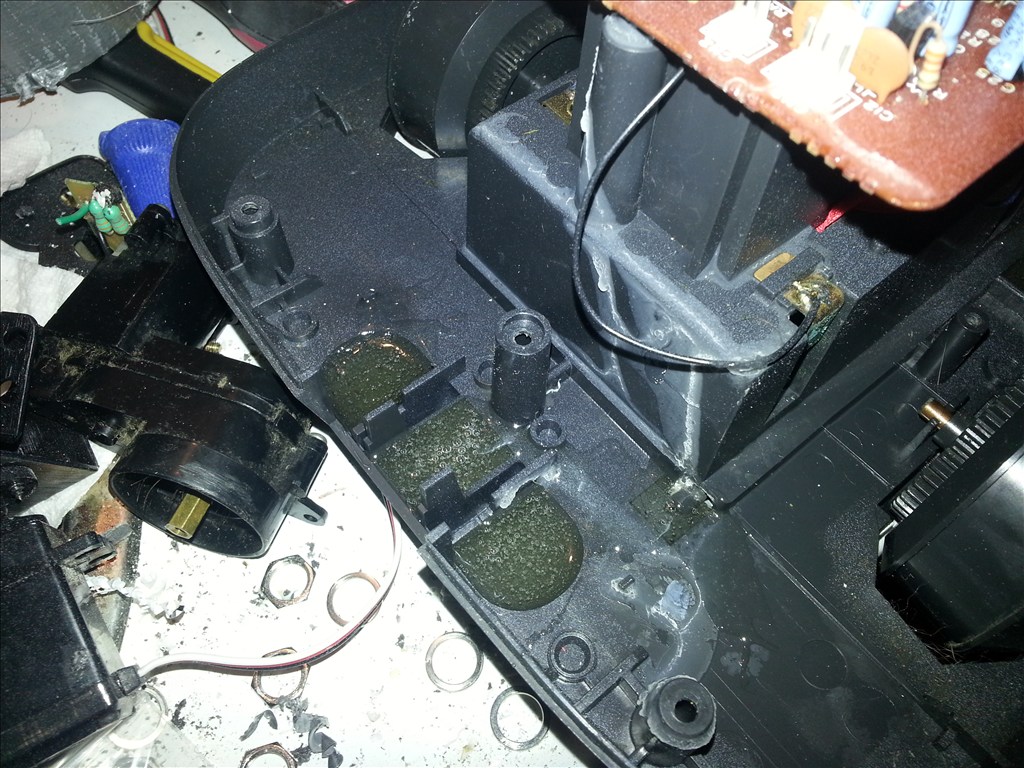
The last three things to work out are the sprayer pump function, IR sensors to detect stairs and lastly the a circuit to monitor when motors stall in case the ultrasonic misses something.
And now I can't connect to my ezb :/ rebooting and removing the Bluetooth profile to start all over. I wish this kind of thing didn't happen.
https://www.youtube.com/watch?v=zcTjQ3ubYm8&feature=youtube_gdata_player
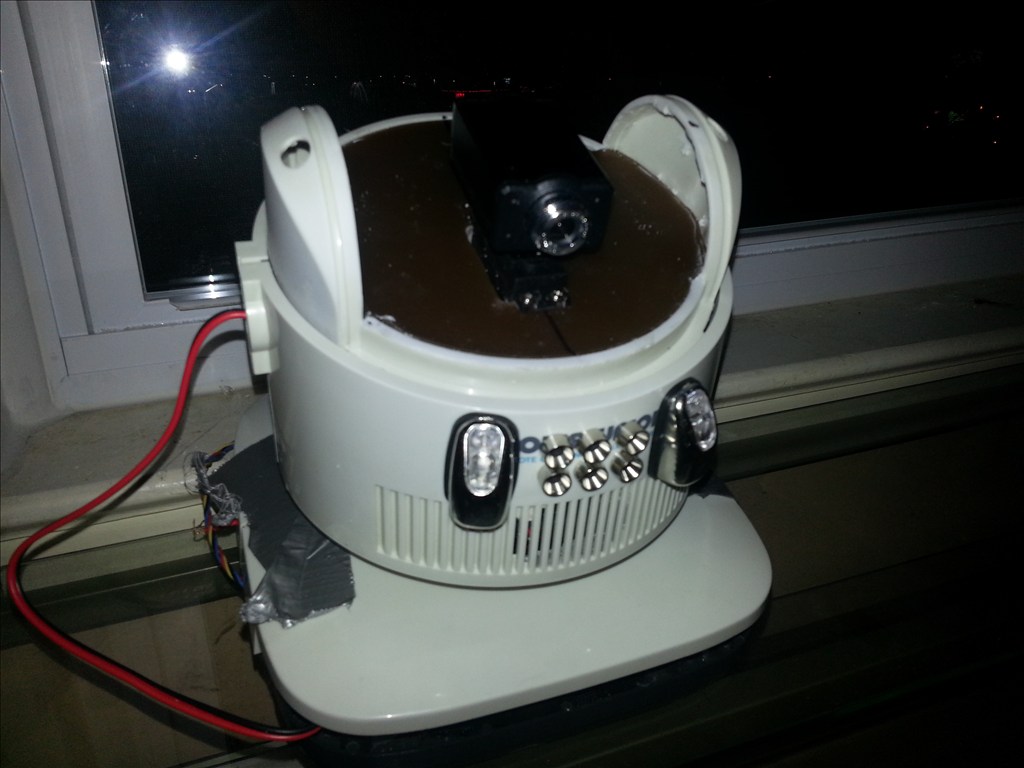
OK so I removed the profile and readded it. I had to try like 20 times but I got it connected. Maybe I need to charge this battery ? Hmm well anyways here is squeegee in the bathroom experimenting with the radar. I may need additional sensors to determine if squeegee is trapped like behind a toilet. Any feedback based on the video?
It does appear for this project to be considered successful a custom navigation and obstacle avoidance script is needed badly. What I noticed in this short test is that only turning one direction Squeegee continues in a loop. Suggestions are very welcome.