









-636348381130562972.jpg)




















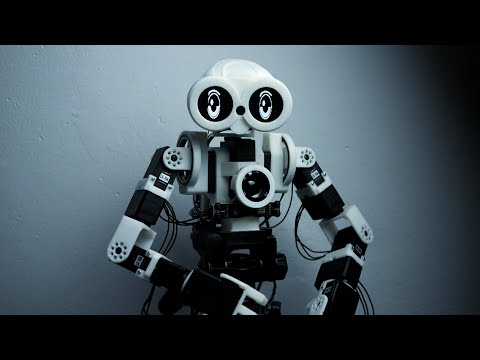
I have decided to start my InMoov project. I think I will call him Spock out of respect to Leonard Nimoy who passed away on the day that I started this project.
I am editing this post so as not to confuse people with the current configuration. I continue to update this post with the latest photos. If you are reading this for the first time, don't be confused. There have been a lot of changes to the InMoov over the past couple of years including starting over.
https://synthiam.com/Community/Questions/7398&page=21 Post 203 starts the rebuild of the InMoov.
I have decided to use an onboard computer. I chose the Latte Panda due to it having an onboard arduino Leonardo and also because it uses little power.
I used 2 EZ-B controllers connected via the camera port to Adafruit FTDI friend boards. This allows the Latte Panda to have a non-wifi dependent connection to the EZ-B's. I use a powered USB hub connected to the USB3 port on the Latte Panda to attach other items.
The Omron HVC-P is used to identify people, emotions, human bodies, hands, age and gender. It is attached to the Latte Panda via an FTDI friend which is then connected to the powered USB hub. It is mounted in the chest of the InMoov. I also use a 3 element microphone which is a MXL AC-404 microphone. It is disassembled and the board and microphone elements are mounted in the chest of the InMoov. This mic board is connected to the Latte Panda via a usb cable which is attached to the powered USB hub. There is a USB camera in the eye of the InMoov which is connected to the Latte Panda via the powered USB hub.
I chose to use the Flexy hand with the InMoov. The design is far more rugged than the original hand and works very well. There are 4 EZ-Robot Micro Servos in the palm of each hand which controls the main fingers. The thumb is controlled by an EZ-Robot HD servo. The wrist waves and uses an EZ-Robot HD servo to do this motion. I use the standard Rotational wrist.
I have castle BEC's for power in the following locations set to the following voltages. Forearm's - 6.2 V - Controls fingers, wrist and elbows Custom power distribution board (2) set to 6.2 V controlling head, neck and Shoulder servos. EZ-B's - set to 6.1 V - it is mounted in the controller mounting plate and connects to the EZ-B fused power boards from a power base. Latte Panda - Set to 5.1 V and is mounted to the EZ-B controller mounting plate. Waist - set to 6.2 V and is mounted in the lower right side of the back. This provides power to the lean and pivot waist motors..
There are some custom power and signal distribution boards. These are in the forearms, lower back and in the upper back. The upper back or main board connects to these distribution points via USB cables to provide signal to the other boards for servos. The main board also has servo connector pins that are for the neck, head and shoulders. This allows the power to be distributed between multiple BEC's and also allows the servo signal cables to be shorter and more protected via the USB cables.
For power I use a LiFePo4 battery that is rated at 30 amps. It has the balanced charging circuit built into the battery and also has a low voltage shutoff built into the battery. This protects the battery and allows the battery to be charged with standard car chargers.
I put switches on the back on the InMoov which are rated at 20 amps at 12 volts. These are rocker switches that allow the user to pretty much slap the switch to turn it off. There are two of these switches. The servos for the elbows and fingers are on one switch. The latte panda, neck, shoulders, EZ-B's, waist motors and some lighting is on the other switch.
I also added a fuse block. This allows 20 amp fuses to be put in line to help protect things. The switches above drive the fuses for each of of the motors listed in that section.





-636348716348649435.jpg)


Discover more robots
Mickey666maus's Oled Animated Eyes For ARC Pro And ARC Free

Rb550f's Ez Robot Attacknid 6Lr

EZ-AI uses RoboRealm for face recognition.
The basic idea of EZ-AI is that databases can be used to house information that is important to the user. Some examples of these are dates, reminders, relationships to other people, song lists, things that you want to be repeated to users and a few other things based on the users age.
There are some other features that are built into EZ-AI that allow you to get information from other services on the internet. Some of these are cooking instructions, directions to cities on your continent, get emails from a few major vendors (currently broken), get information from START (wikipedia information) and a couple other things.
If you look at https://cochranrobotics.com/EZ-Robot-Plugins you will see what it can do. I would go through the 1.7 install if you want to use this now.
I personally would wait on this though. We are working on rewriting EZ-AI to be a lot better. Some of these features that are being added to the rewrite are
Use of a very good speech recognition engine A very extensive knowledge base that has its content reviewed by experts in the particular subject to approve or modify the information. A great text classification engine that also predicts classification based on the context of the words in the sentence A Natural Language Processor
It will also house the same types of database information that EZ-AI currently has along with the other features that EZ-AI has. There will be a specific number of queries per month that you will be able to submit for free or for around $25 per month you will be able to perform about 33 queries a day. If you need more queries, it will be sold in increments of 1,000 queries for around $25.00. There might be a nominal setup cost if you want to run the server on your own equipment, or we will offer a server for sale that will handle all of this processing (around $200). I would recommend this route simply because of how easy it will be to get up and going and also how easy it will be to get any updates to the product.
I am sure that this will bring up questions, but its pretty simple.
The more users that I get, the less the charge becomes so it is hard to get exact numbers on the monthly charge. There will be no contract or anything like that. We will setup paypal billing for the pay customers. Once a payment is made, the feature is turned on. The thought is that the first month would be free for up to 1,000 queries, but you would prepay for the second and following months.
I can't go into it much more than this, but we will be looking for testers around the end of the year or the beginning of the year.
"...ooohh oohhh pick me, pick me!" (waves hand around)
Will, you are on the list.
The list of testers will come from the EZ-Robot community and some Comp Sci students and professors at the University of Texas at Dallas. The EZ-AI community being international is a great test group for some of the language translation features also. I wish I could say that everything is ready right now, but we are 2-3 months off from having a product that I feel comfortable going into the testing phase. The goal is to deliver a finished working product with very few updates going forward. It is also to have a method of updating that is very simple. This requires us to do a lot more work upfront before we release the product.
Sounds great and thanks. I think the pricing is very reasonable and I think you will have a lot of customers! Looking forward to testing with ALAN when available.
@David
i hope i will be also a good tester for you!
To the EZ-AI - meanwhile i will check and try the old EZ-AI until new Stuff is coming out from you. So if the new version is there, i have some knowlegde from the first version.
Other Question:
Do you have any news for the Omron Board? Or you are more busy with your new Software Project?
I mean, in the moment its not so necessary for me, because my Inmoov has still missing the left arm. So i have also left some work, but end of the year i will be (thanx to god) slowly finish.
Boris
As far as the omron goes, I don't have anything yet. I have a question out to Tony about one item. I haven't had time to mess with it yet, as I started at the bottom of my robot and am working my way up. The lower portion of the robot should be completed by the beginning of the month and I will then start working on the head. This camera will be in the head so it is on the list. There is a lot that is going on with this robot and I am about to finish the arms. I will then work on the neck and then the head.
@David
ok, no prob - like i was thinking!
But i must repeat like Fxrtst :
Waves hands around - please pick me also up for testing ;-)
I am finally back to working on this guy. I am doing a complete reprint and rebuild of him and documenting the print time and filament amount used. I could have used him at the convention I was at a week ago, so I decided that it is something that needs to get done.
I have been printing for 17 days on 2 flashforge creater pros and am 45% complete on printing all of the parts again. I plan on using some of the mods that others have made to improve it.
Lets see if I can do a better job of documentation this time.