
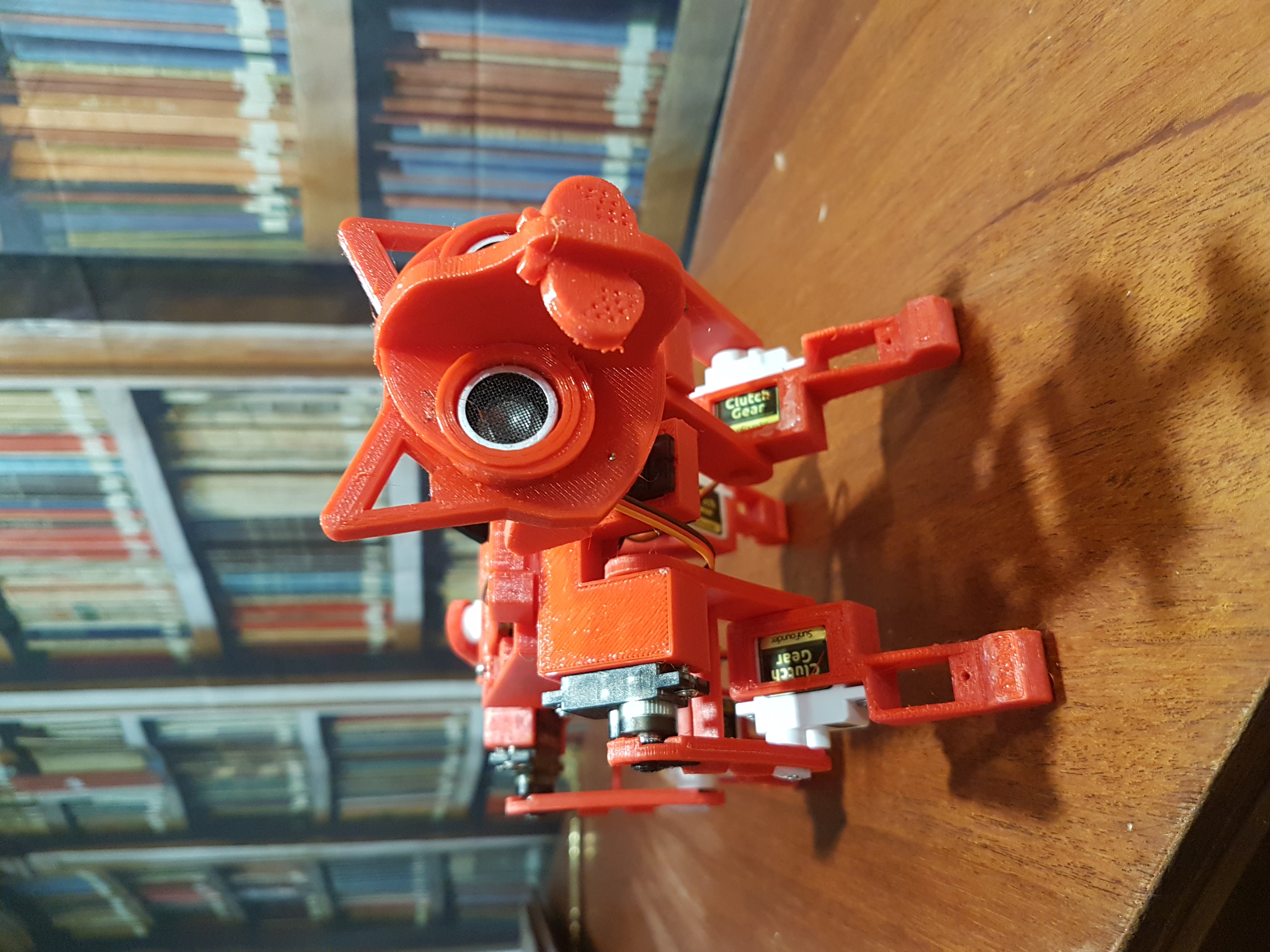

Hi I am sure most of you have seen OPEN CAT on the internet as it has been a few years since it was designed, the designer was not sure how he was going to market Open Cat, was he going to make the .stl files available for 3d printing or was he going to have the parts made by injection molding and sell Open Cat as a finished robot or as a kit. we can see this very thing with our member Will fxrtst, with his Alan android head. but open cat is now available as Nibble and he used laser cut plywood and it is in a kit form. check it out if you have interest. I have been watching with great interest other members of Synthiam, working on quadruped robots, which interested me. but the instability problem seemed to be the biggest issue to overcome. DJ. has the Idea to use a MPU chip. to me that is the way to go, and Open Cat uses the MPU-6050. with success, Open cat walks. So to test out how to design a quadruped robot. I found that the stl files for a open cat design using a mpu chip is available on Thingiverse.com search for opencat no spaces between open and cat. and you will find a stl files to make a Open cat designed by manic-3d-print which mimics the nibble open cat design and uses the arduino programming from open cat nibble. I have finished printing this and installed the mini servos and am still waiting for the HuaDuino controller board and DJ helped me with this and how to link ARC. it is still a work in progress. see the pictures I supplied





That is totally awesome. I have seen the Opencat before. What you have looks very much like what I am working on as well. It's smaller size really lends itself to these lower torque servos. In my attemps to get my Robopup walking I have found just how much a weight shift is needed to keep balance. Control of the CoG is critical. In a stupid DUH moment I realized that a weighted tail that swings easily provides that.
Keep it up and hopefully we can have a fallover blooper reel compilation contest.
Great work.
Thanks Perry Have a look at the video's at Thingiverse.com search opencat. it shows the stability that is from the tail and more from the mpu chip. The controller comes from china and has rave reviews, but it will take a very long time to ship to Canada. so it may be awhile before NallyCat walks. Hay what happeded to my pictures they are all over the place. none of them were downloaded that way. never upside down. how can I get this fixed?
Not sure about the picture orientation. My Robopup thread had similar problems I tried to fix and eventually was deleted cuz it was a mess.
I think you can use the EZ controller if you have one to at least play around. I was really pleased the first time I had Robopup dragging itself across the floor. I followed opencat on hackaday.io. It is still up there. You have probably seen it.
open cat Here is a Youtu be Video Showing this 3d printed OpenCat's cat like movements and it's stability just click on the words open cat.
I have been watching Open Cat for a while!! Cool find!! I might want to print one myself, I am having loads of micro servos sitting in the shelf anyways!! Thanks for sharing!!!
I like the idea of the arduino on there. Mainly because you can use their existing code and merge it with the arduino ezb code as well.
Then you end up with a firmware that uses their mpu data and merely accepts movement commands from ARC
I’d love to see how that would look. Maybe an example test on some Friday hack?!
I don’t have that robot so there’s not much I can do to demo on a Friday hack. I’d watch one of the previous hacks when I review the code. It’s pretty simple. I think the one to preview is when i created the wheel encoder firmware. Because I add my own command and demonstrate how the code gets called in the Loop() method