
Pretty much a failed experiment for many reasons, but I already have ideas on a new version....


By Dunning-Kruger
— Last update
Discover more robots
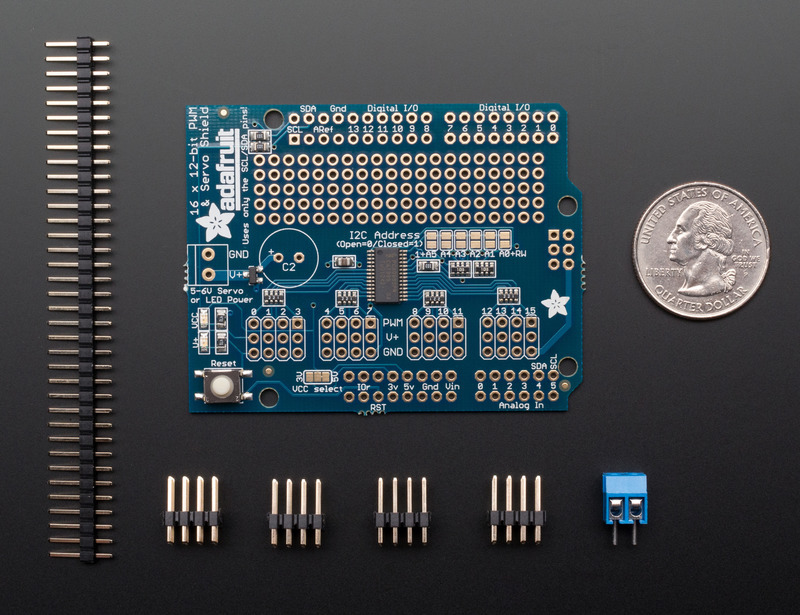
Mickey666maus's Hey Guys...This Adafruit 16-Ch
Control Adafruit 16-channel PWM/Servo Shield with Synthiam ARC to drive multiple servos seamlessly.

Oldbotbuilder's My 'Bot Wilber (Now Ez Wilber)
Convert LEGO EV3 BALANC3R into EZ Wilber with EZ-B4, camera, speech, voice recognition, IR/RC control, autonomous...
R2D2's Rsp Robot
Robot RSP: building a 5.4 ft robot with ez-b v3, traction system, ESCs, voltage regulators and batteries-community...

That is totally cool. Why do you consider it a failure? I'd be proud of that!
whatever you make and test for the first time is not a failure.its just a START, to your dream.even god needed 6 days to make the earth,and even this , earth is not perfect.you cant predict what you dont see.you made the dog walk. you learn along the way.you know that.thumbs up.
Richard R, That is an awesome robot, the only thing it failed at was scaring the cat. Steve S
Ok, so the reason I feel it failed is because of a few issues...
I had planned an arm like Boston Dynamic's Spot mini... but as mentioned he's already too heavy
Bottom line need to redesign... Time for version 2
Time for version 2
3d print it a AT AT walker body and you have a winner ( any some snow speeders)
if you have a 3d printer then making custom joints may work better for you
https://hackaday.io/project/157812-3d-printed-robot-actuator
this guy has files to print for your application.
@RichardR, I'm impressed with the first test!
It is kinda cool, though. You put a few hours in for sure. The video didn't work. Video worked this time. Cool.