


Trying to find the optimum solution for a robot that uses all the pieces in the development kit.
I am leaning towards a Fork of Zowi / Bob / Otto, the little open source creative commons (supports commercial license) biped robot. It has 4 servo's on the legs and there are some forks that have servo's for arms. What it lacks is a decent brain as it is arduino based so it can only do basic moves so I think the EZB would add a lot of value.
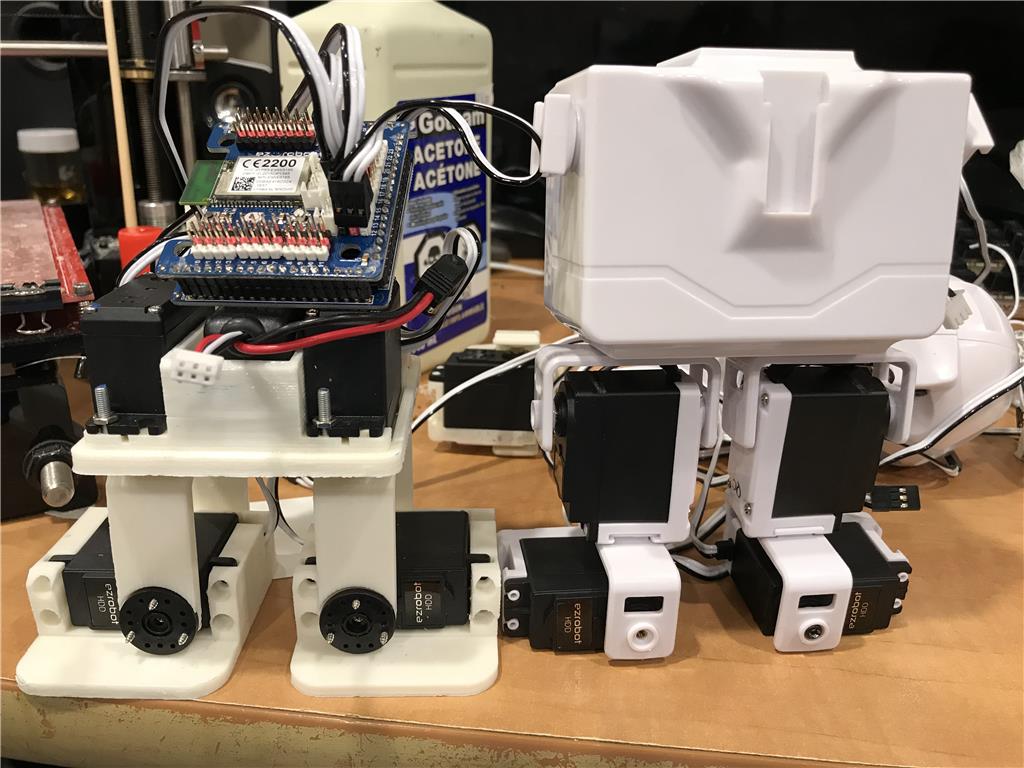
I printed a Zowi off and it looks like it is fairly close to what is needed.
Logic is use the existing HDD servo's for legs (2 Servos for feet and 2 for legs). They fit perfectly into the Zowi legs.
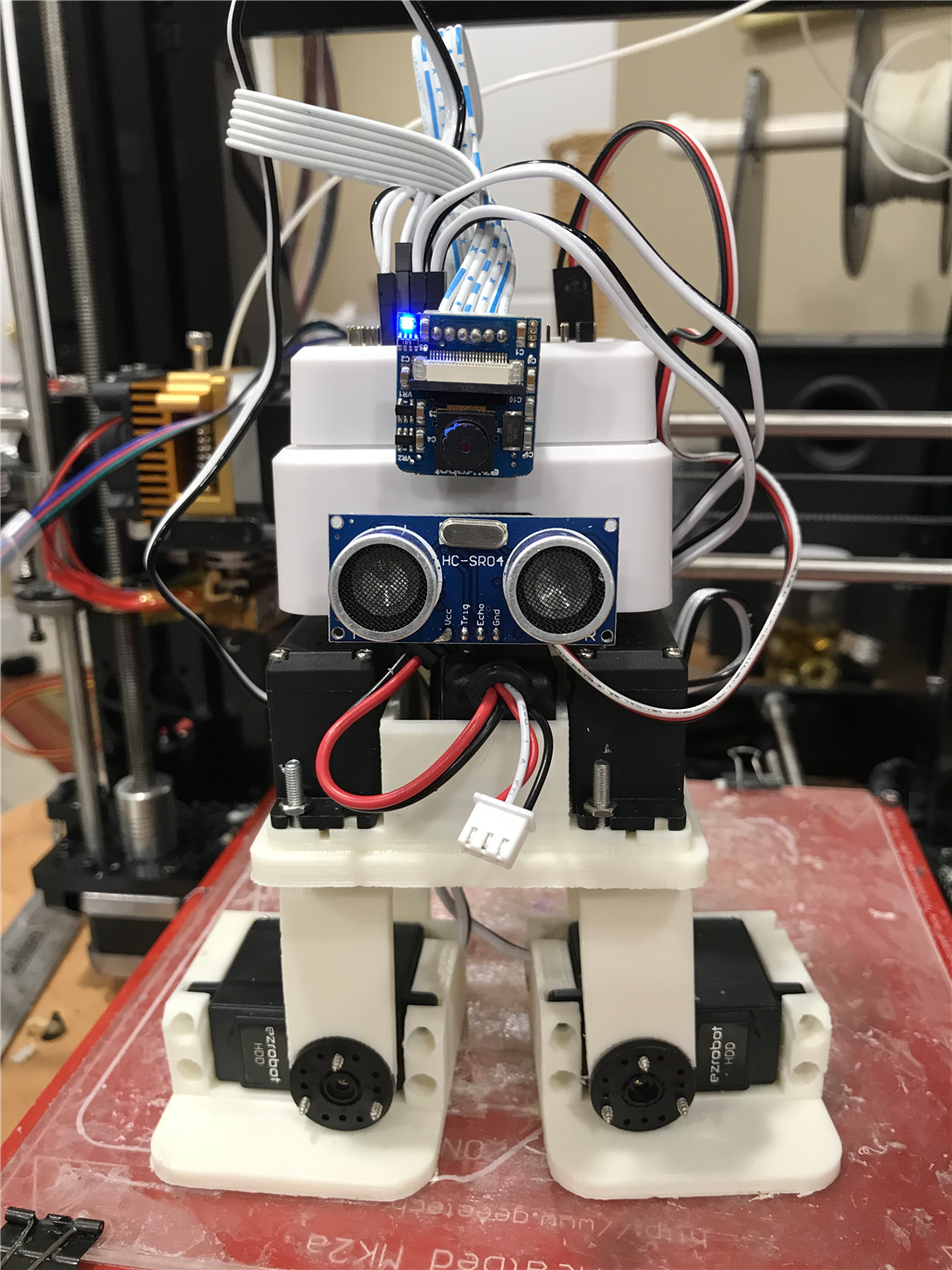
Use the 2 full rotation servo's for arms and add the camera and distance sensor.
Looks like the only major change will be the chassis design so it can fit the top of the EZB V4 and create some arms but the legs are pretty good and fit servos and the battery holder fits one of my 2S lipos.
Discover more robots

Dave's Bimbo The Clown

Wiinteru's Blue Irobot Roomba Hack


That looks cute! I've never heard of Zowi before, pretty neat! The full rotation for arms though...I'm not sure, unless you really want them to spin around and around?
"The full rotation for arms though...I'm sure, unless you really want them to spin around and around? "
I kind of figured if the arm only has 1 servo each it is not going to do much anyway. Good for dancing and hand waving, The 360 servo's are the only things left in the box after building a Zowi. I guess both servos could be combined to make a 2DOF arm but without a way to zero it I am not sure it would be much good anyway. I wish I had some CAD skills as I am struggling here with sketchup trying to design a nice chassis. I am in learning and failing mode at the moment.
Oh BTW here is a ZOWI
That is one cool little robot ! Fun to watch.... Put a propeller, a wind up key or a cool spinning hat on his head for effect, then only one CR servo left.
Thanks for sharing.
P.S Great IO Tiny project.
Yeah a spinny hat maybe a good idea. Not sure what to do with the 360 servos. In process of adding a robot arm to 4 of them. For what purpose I am not quite sure.
very nice robot for learning,like how the horns are made.3 screws. also diff colors .
Struggling with writing the walking gait for this guy. I am trying to use the custom Movement Panel to do a forward, backwards, left right. I will give the guys who wrote the gait for Zowi points this is really hard to get this guy to go the way you want and do it smoothly with only 4 servo's. I am using Servo(port,position) and shifting 1 server at a time (foot up, turn leg etc) and then a short sleep before moving another but is quite a challenge.
I am wondering if I should try writing some sort of machine learning script with the sonar. Try moving a foot X degrees and a leg Y degrees and then the same on other side. Check distance after 10 steps, see how far I get. Now walk backwards to starting point and try again increasing foot say 5 degrees up or down etc until you get the fastest walk.
Any pointers?
For the walking gait - use the Auto Position control. Nothing beats it and will take less than an hour to create... Read here: https://synthiam.com/Support?id=180
and will take less than an hour to create... Read here: https://synthiam.com/Support?id=180
Also, watch this: https://synthiam.com/Community/Tutorials/97
And this if you want to make the robot dance once you have a bunch of actions and frames: https://synthiam.com/Community/Tutorials/52
The learn section has more activities as well.
thanks for the pointer @DJ I guess I should have looked for that tutorial before I started writing dozens of lines of script :-) I think I will save this for another night. He can hobble along now but It's not pretty. It wasn't until I actually stood up and tried to walk like he would with only 4DOF that I started to understand how to propel him along and turn him.