


Trying to find the optimum solution for a robot that uses all the pieces in the development kit.
I am leaning towards a Fork of Zowi / Bob / Otto, the little open source creative commons (supports commercial license) biped robot. It has 4 servo's on the legs and there are some forks that have servo's for arms. What it lacks is a decent brain as it is arduino based so it can only do basic moves so I think the EZB would add a lot of value.
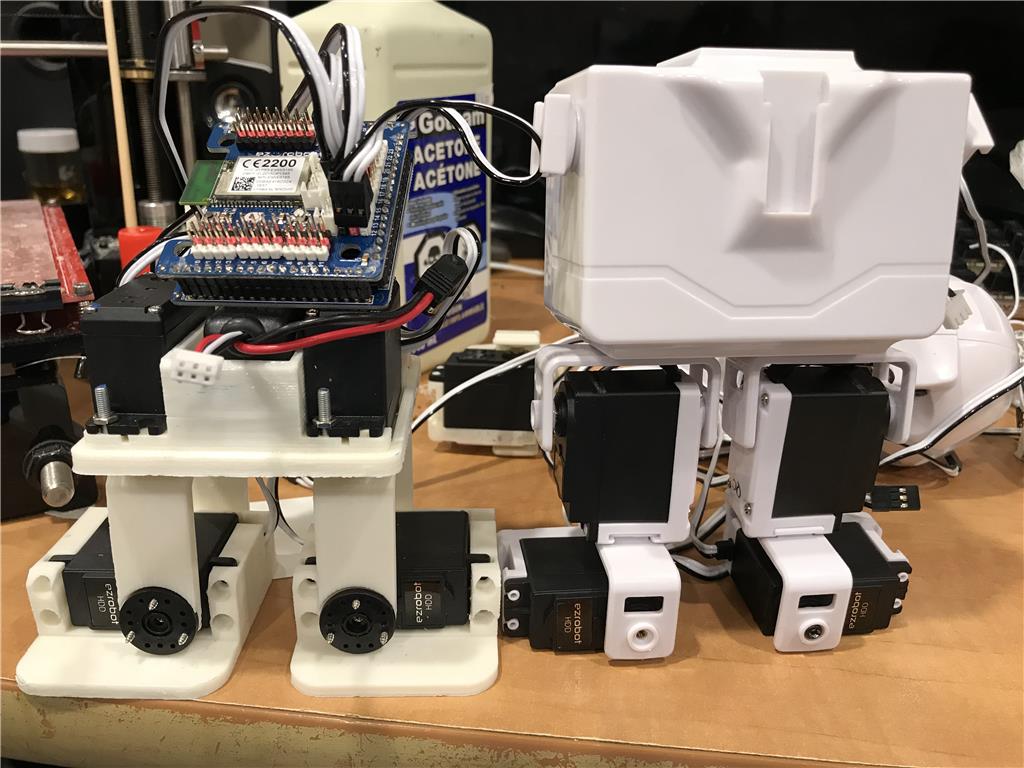
I printed a Zowi off and it looks like it is fairly close to what is needed.
Logic is use the existing HDD servo's for legs (2 Servos for feet and 2 for legs). They fit perfectly into the Zowi legs.
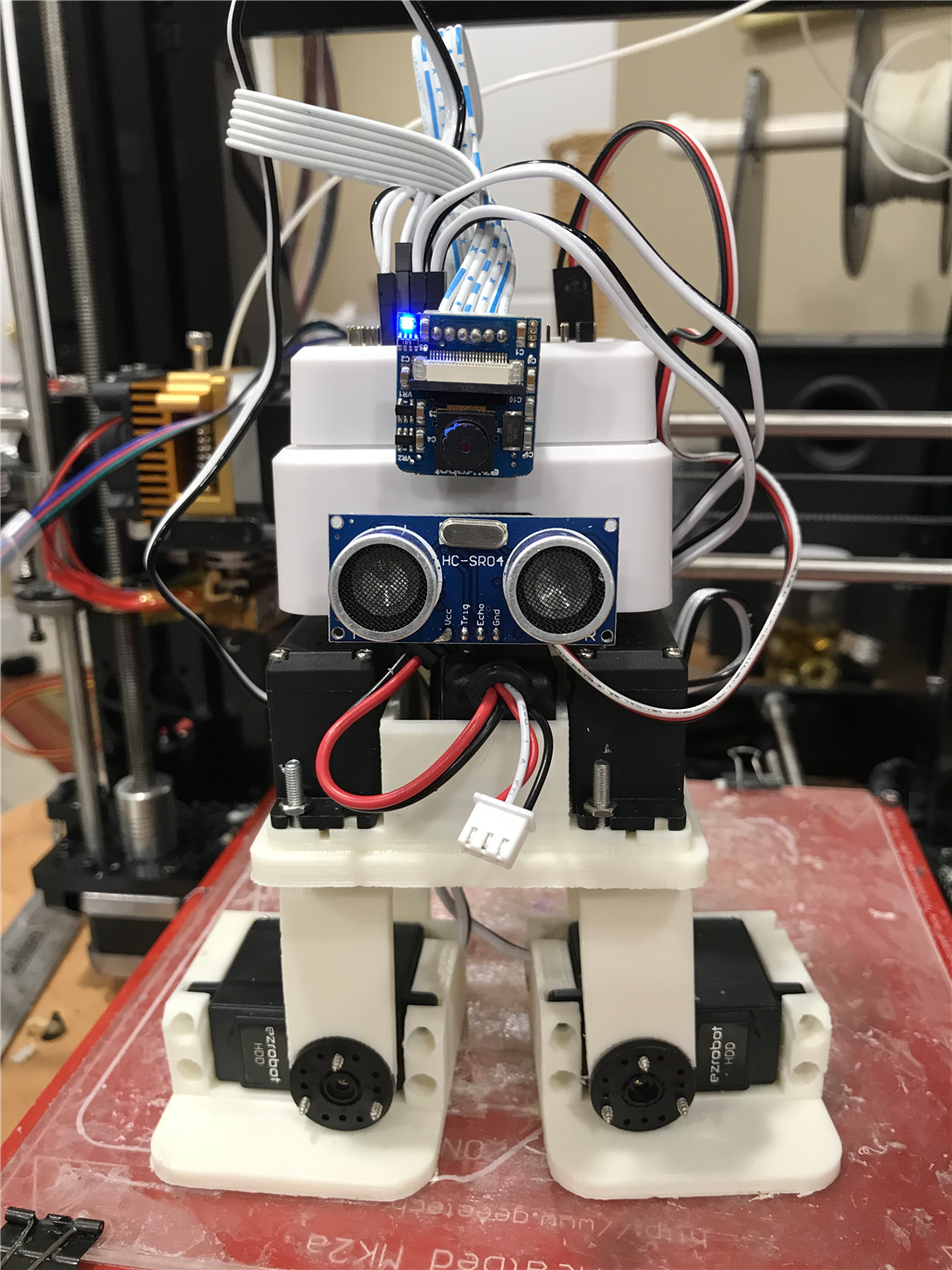
Use the 2 full rotation servo's for arms and add the camera and distance sensor.
Looks like the only major change will be the chassis design so it can fit the top of the EZB V4 and create some arms but the legs are pretty good and fit servos and the battery holder fits one of my 2S lipos.
Discover more robots

Cardboardhacker's Emotions V1

Ezang's Two Projects From The Past - Re-Mixed

@nick I’ll try your config with feet to let you know if he balances
Frank
maybe you can use this config.
@Nink I implemented your short leg design and it works great!
I also removed the unused servos in the JD body and Its very stable.
If you decide to offer your 3D print services through the EZ-Robot link I'll order a set
synthiam.com/Tutorials/Lesson/88
Thanks again for the idea
Frank
@Frank Nice work . You don't want my printing services, I would have to pay you. Did you not see my thread on me begging for 3D printing help. Multiple EZ Robot experts hand holding me and I still can't get a decent print job. I would blame the worlds cheapest Prusa I3 clone I use but other people have the exact same printer as me and their print jobs are amazing. https://synthiam.com/Community/Questions/10750