
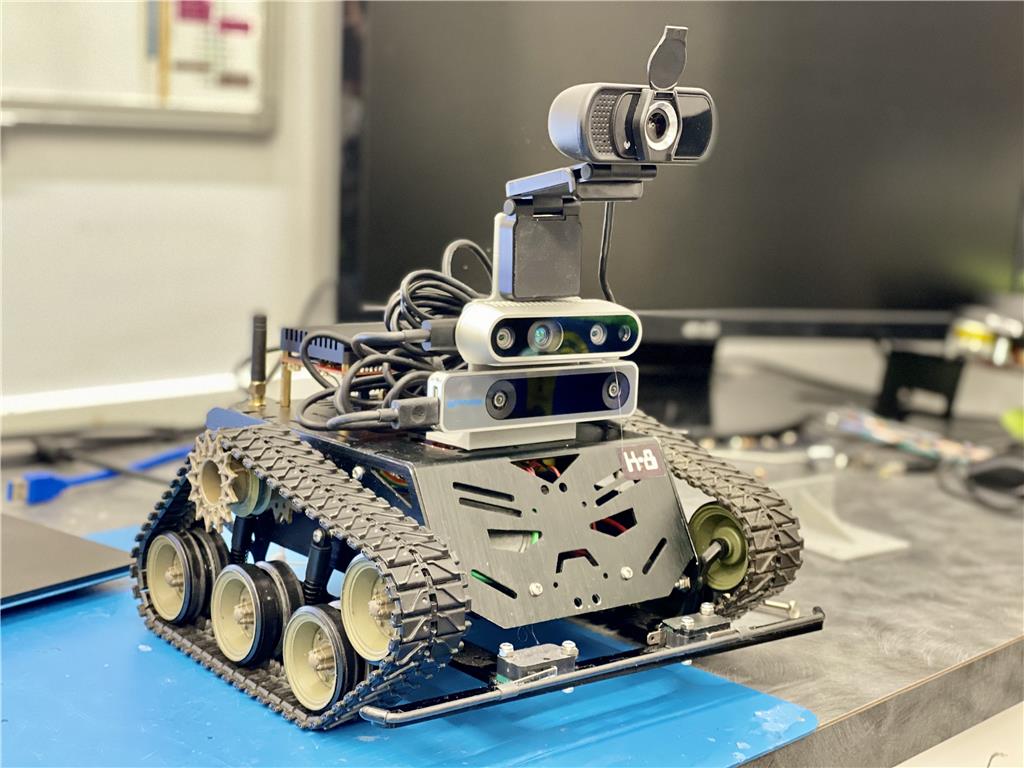
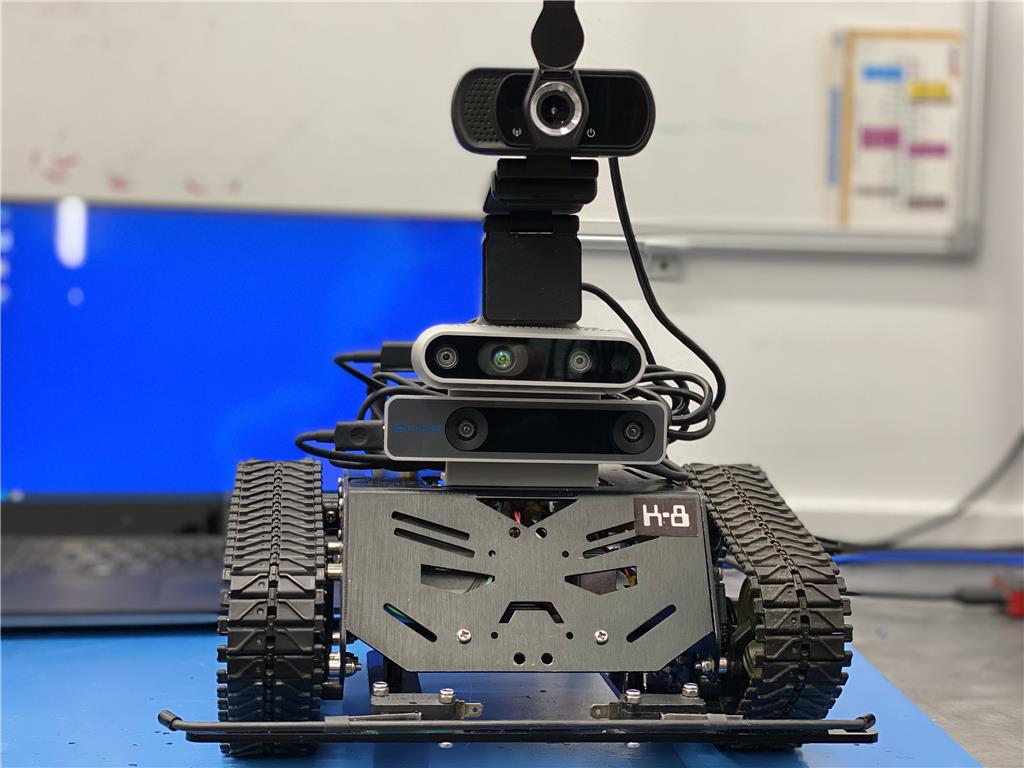
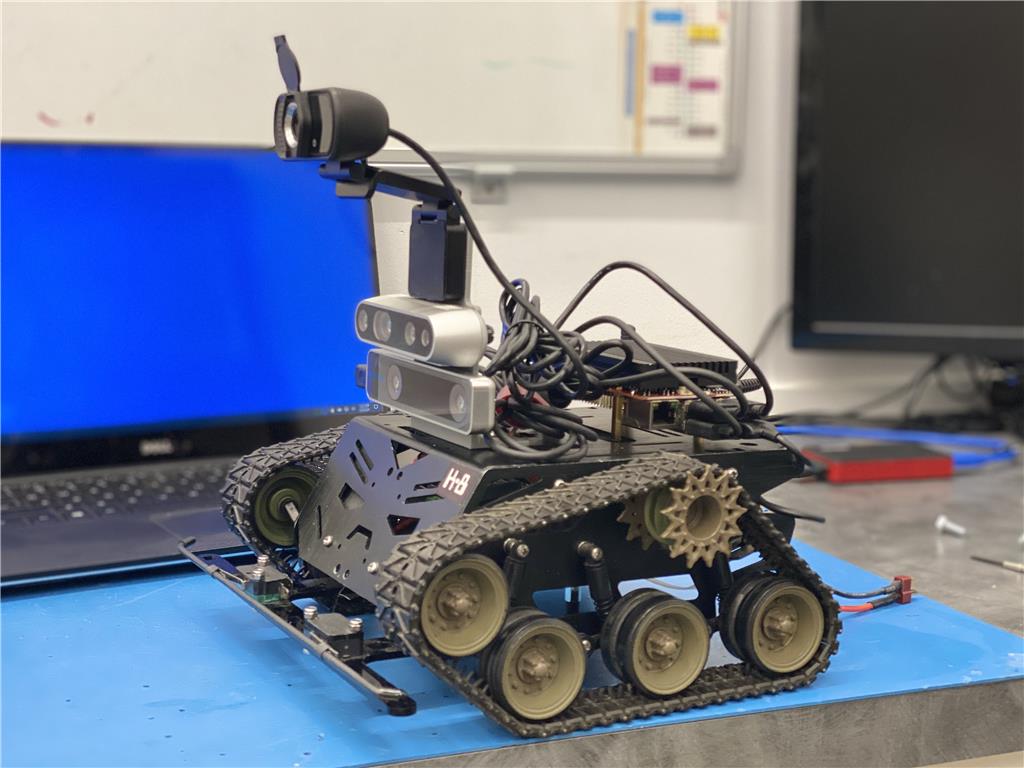
This is my robot I rebuilt to use as a test platform for ARC. When developing skills and ARC features, this is one of the robots I use for testing with.
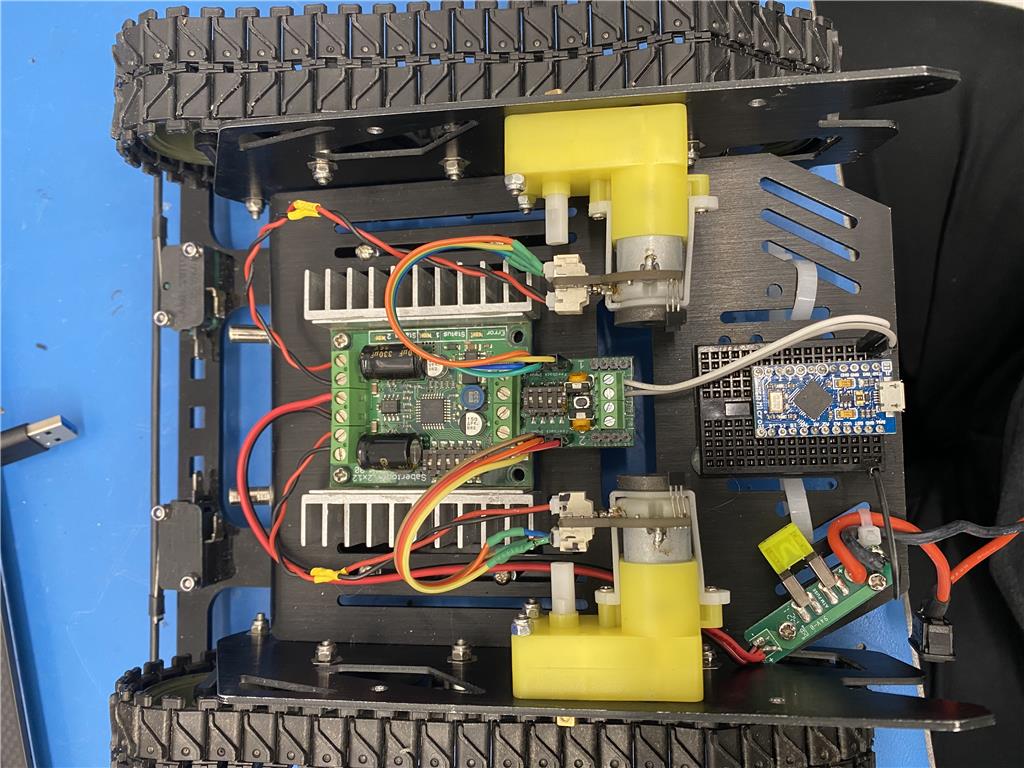
Hardware - Devastator Tank Chassis - DF Robot wheel encoder DC motors
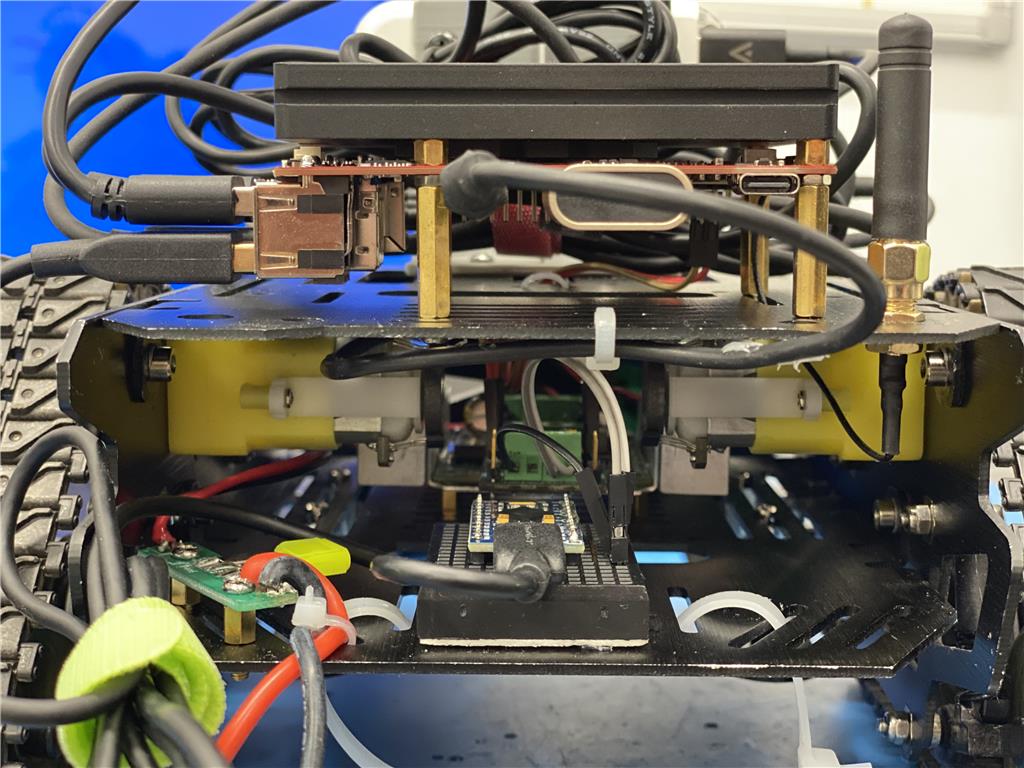
- Dimension Engineering Sabertooth 2x12 w/ Kangaroo x2 (configured for independent speed control with encoders)
- 7.4v Lipo powers sabertooth/kangaroo/dc motors
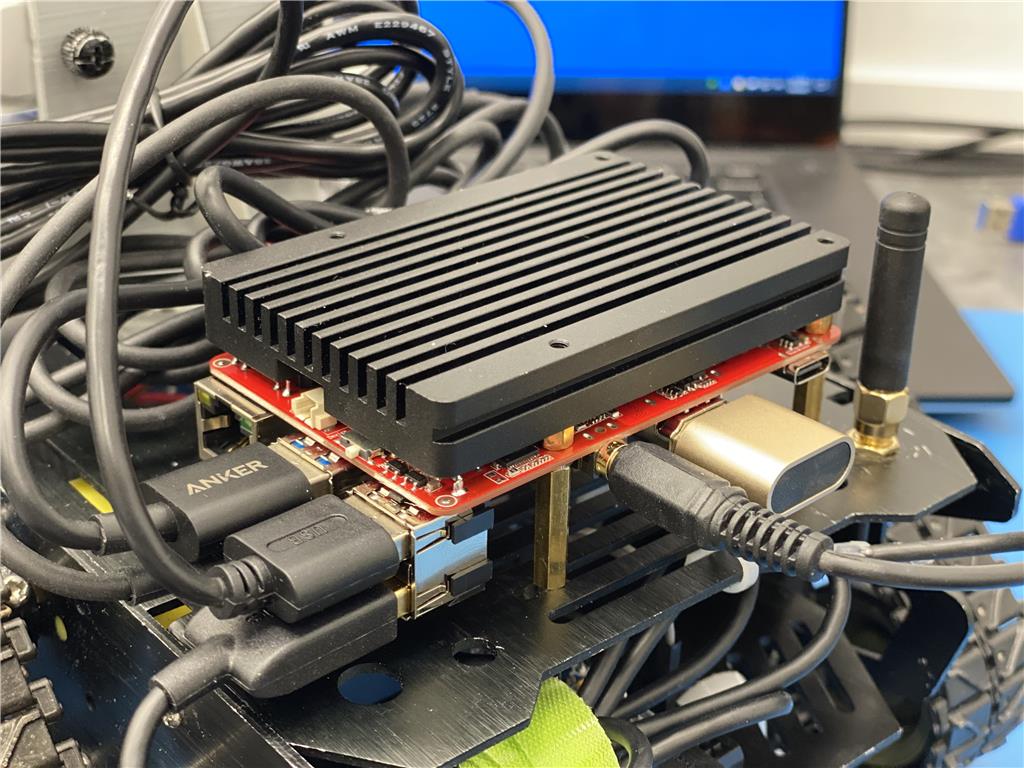
- Rock Pi/x SBC with Windows 10 and ARC Early Access
- 5v 20 amp lipo battery pack powers Rock Pi/x via USB-C
- 5v audio amplifier and 1.5" speaker connected to line-out of Rock Pi/x
- Arduino Pro Micro (USB connected to Rock Pi/x, UART connected to Kangaroo) mounted on a breadboard for rapid prototyping
- Intel Realsense Depth Camera D435i (sends laser scan depth data to NMS for navigation)
- Intel Realsense Tracking Camera T265 (sends telemetry pose data to NMS for navigation)
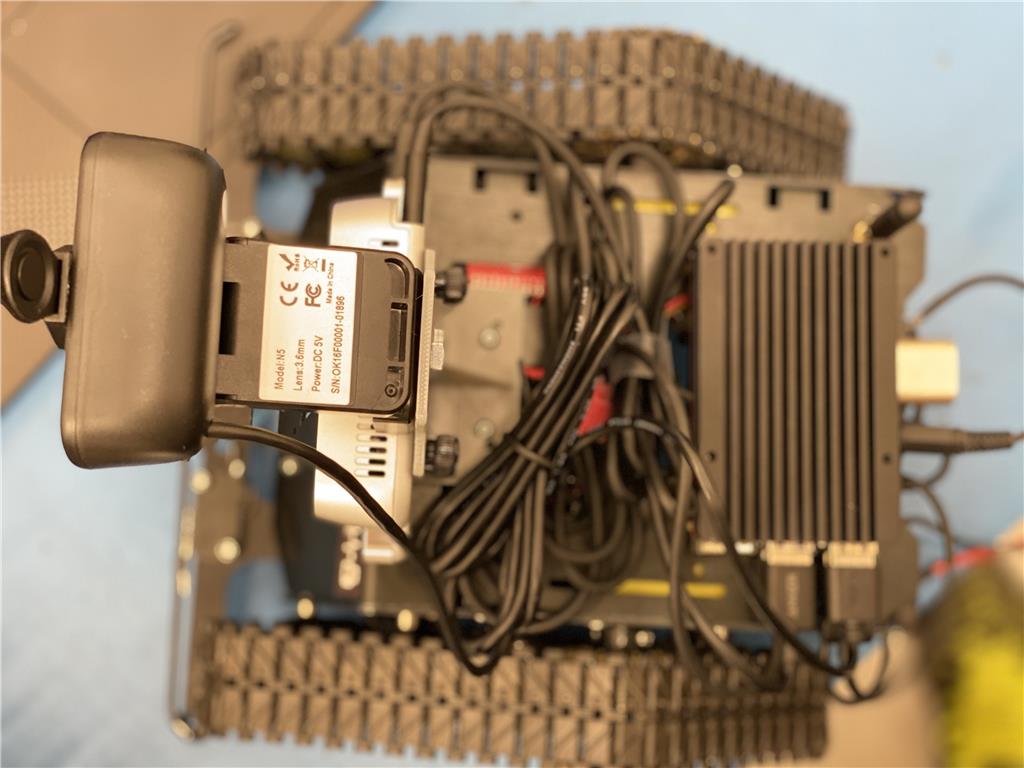
- 110-degree FOV USB camera for object/color/face tracking and Exosphere usage
Software
- ARC Early Access
- Windows 10 optimized for SBC using Storage & Performance Tips, Headless SBC Tips, and SBC Power Tips
- Arduino Leonardo EZB Firmware
- The Navigator for way-point NMS navigation
- Intel RealSense T265 robot skill NMS driver
- Intel RealSense D435i robot skill NMS driver
- Sabertooth Kangaroo movement panel
- Network Change robot skill for notifying of SBC network connection
- Movement Joystick for analog movement control
- Exosphere for remote control
History There's a bit of history behind this robot. It was originally owned by a customer who had passed away in the New Year of 2021. I was given a few of his robot parts, including this robot that he named K8. The original robot had a Raspberry Pi with an Arduino, a homemade l298n motor controller without speed control, and ultrasonic distance sensors. I wanted this robot to perform functions that the original owner aspired to achieve, so I replaced all of the components. To achieve autonomous navigation, the Intel Realsense suite of Depth and Tracking cameras were added. To improve processing capability, the Raspberry Pi was replaced with a more powerful Rock Pi/X SBC. Even though the Intel Realsense cameras can provide a video feed, a USB camera was also added for additional testing.
Discover more robots
Cardboardhacker's 1/2 R2d2 Scratch Build

Justinratliff's Jd Spock


Very inspirational robot platform, I have the Vex Kit that looks similar, This will inspire me to start building it.:)
It was a fun show. Thanks for doing the live hack!
This looks like it has everything in it including the kitchen sink.
Thanks for the list of parts and software.
It's good to see you back to building and improving little robots and toys. Your sense of wonder and fun is what inspired me to try your robot platforms. Thanks!
Thanks, Dave, this is a great platform to work with. It took some time to figure out how to make it drive straight because their gearboxes are kind of cheap. But the sabertooth combined with kangaroo does help a great deal. I use this robot for testing and it works wonderfully!
Ha ha , Hey DJ I was looking at some guys built a robot like this one and it did very little,nothing impressive so when I ask them how long it took to program it,they mention days or weeks, I say with Synthiam ARC I could do more than what they (Coding for Arduino) did in 1 hour,LOL! Then they always get really mad at me and I just laugh at them back for wasting so many hours,just happened again!
I’m not sure why people prioritize ego over function. Guess that’s why robots are still a hobby vs industry
Ya so true and all I am trying to do is help a few people be more productive by giving info on how they can work far more easy and quicker for the Goal they are trying to accomplish the hard way. Sad.
People don't like to be told they're wrong by someone that they have never met or don't respect.