jp15sil24
Wheel Slip Impact On Navigation
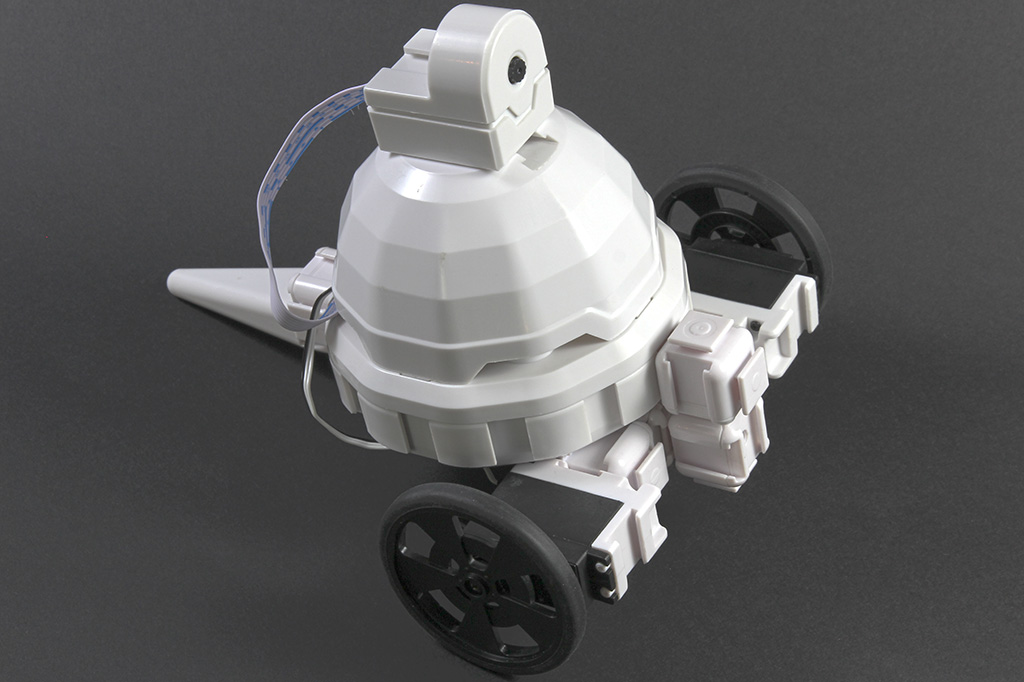
I am experimenting with navigation using my WheelBot and am considering modifying it into a telepresence robot. Currently, I'm utilizing a combination of the following ARC skills: Continuous servo Movement Panel, Better Navigator, Joystick, Camera Device, and RPLIDAR (Model C1). I've enabled the RPLIDAR skill parameters: use NMS and fake NMS pose hint event, and I'm using the pose hint source with Hector in the Better Navigator skill.
In one of my tests, the robot successfully navigated a 1.5-meter course and returned to its "home" position. However, during a second test, I noticed only half of the return path was visible. Normally, the entire return path should be displayed in green (refer to the LIDAR image below).
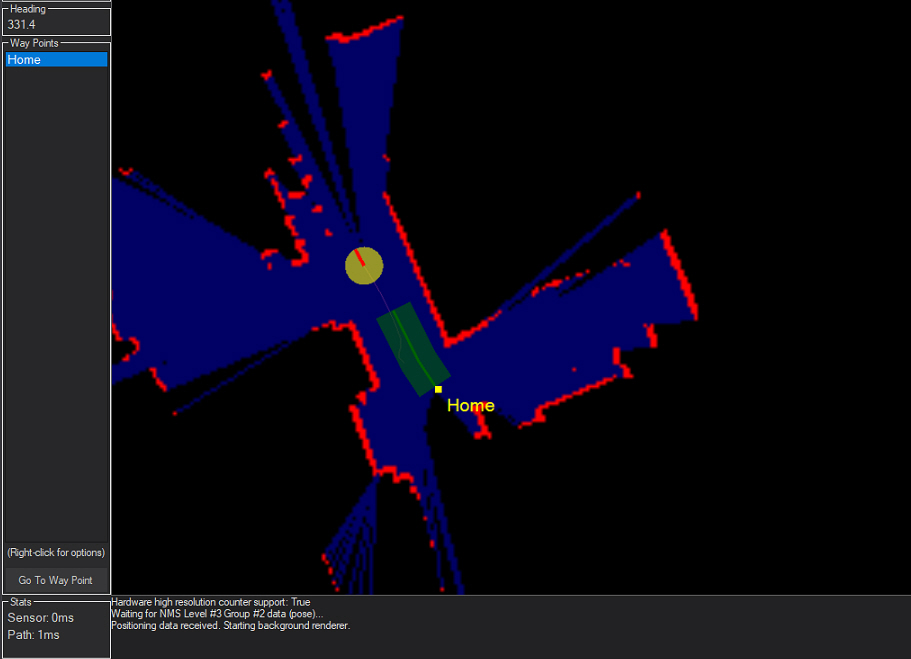
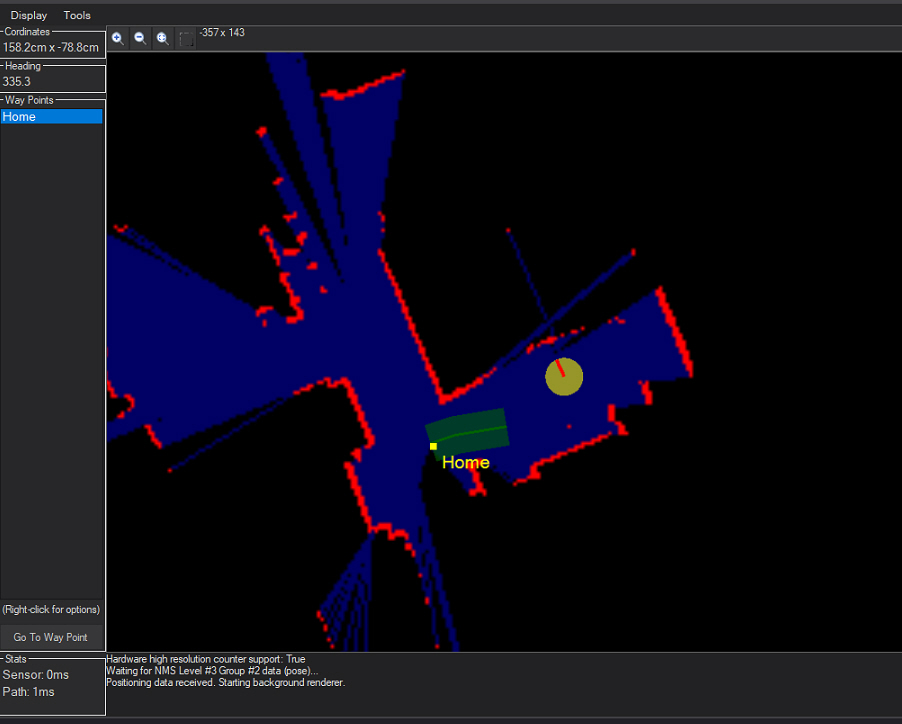
It appears that some information was lost during navigation. In another test, the yellow dot representing the robot was correctly positioned but then suddenly shifted to another location, as shown in the second LIDAR image.
The original position was similar to the photo above (LIDAR Image 1).
I'm not entirely sure if my observations are helpful in explaining this behavior, but I wanted to share them. My floor is tiled, and I've noticed the robot’s wheels sometimes slip, slightly spinning in place. I do not have encoders on the wheels. Could this affect navigation accuracy?
If wheel slippage is influencing navigation, could someone explain how wheels without encoders affect navigation?
If it's not related to the wheels, could you please provide some guidance on how to address this issue? I'm considering adding spikes to the wheels if this might help. Thank you!
Related Hardware (view all EZB hardware)
Related Robot Skills (view all robot skills)



Great news! My robot was able to move correctly using only the RPLIDAR C1 with Hector as the pose hint. Here’s the video (2:27 long): https://www.youtube.com/shorts/UyGPficqqkI At 2:22, the robot bumps into a door - that was the only time it got off track. It moves with a bit of a zigzag pattern, but it stays on course overall. I’ll continue doing a few more tests, and I’ll also try the T265 camera later with the Dynamic pose hint.
That's awesome! Got it sorted out now. Excellent, how much data is required for SLAM to work? I should do a video someday on how slam works. There aren't many good sources out there.
oh yes a video could be a good idea. It seems to me that the description of the RPLIDAR skill has been updated with better explanations, especially regarding the position of the LIDAR on a chassis. If it continues to perform well, I might remove the T265 entirely-then the rear view of the LIDAR will be 100% free and unobstructed. That should simplify things and improve mapping. I will do a short try with the t265 to compare the results. Appreciate the help!
I'm curious about your experience with the T265... I think i mentioned before to put it in Dynamic pose hint mode. You can try them all to find the best that works for you - but i feel that dynamic might be the most reliable since the T265 drifts so much.
I ran a few tests using the Intel T265 together with the RPLIDAR C1. I couldn’t continue for too long because my battery drains rather quickly. Here are two videos: in the first one, the T265 is in dynamic mode, and in the second one, it's in differential mode.
Dynamic mode: https://youtube.com/shorts/f-qAfETMvwI
Differential mode: https://youtube.com/shorts/OM1KD6hecqk
In dynamic mode, the results aren’t great - the yellow dot keeps spinning in place and it’s impossible to return to the starting point. It just zigzags on the spot. However, in differential mode, it works much better. It behaves similarly to using the RPLIDAR alone. It might just be my impression, but it seems to make fewer small zigzags in differential mode.
In the description of the Better Navigator skill, it says to use dynamic as the pose hint suggestion. But in Example #2 (Intel RealSense T265 & 360-degree LIDAR), it recommends using differential instead. That’s why I decided to try that mode.
Just an update about my testing. I did a run using the RPLIDAR and T265 in differential mode - it worked perfectly at first. I was able to drive about 20 meters with several waypoints without any issues. Then I restarted and ran the test again, but it didn’t work properly anymore. The yellow dot started moving around strangely.
This confirms what you mentioned regarding the T265 drifting after a short period of time. I will stick to using only the RPLIDAR - it seems to perform better on its own.
I am starting to feel like the t265 should be reset every so often, or something like that. Some timeout that resets the sensor. The previous pose location would need to be stored and added to after the reset. But maybe that would prevent drift.