ed_eilers
Netherlands
Asked
— Edited
Help With Serial Bus Servo (Almost Dynamixel Protocol)
I would like to get some help on serial bus servo's that use almost the same protocol as dynamixel.
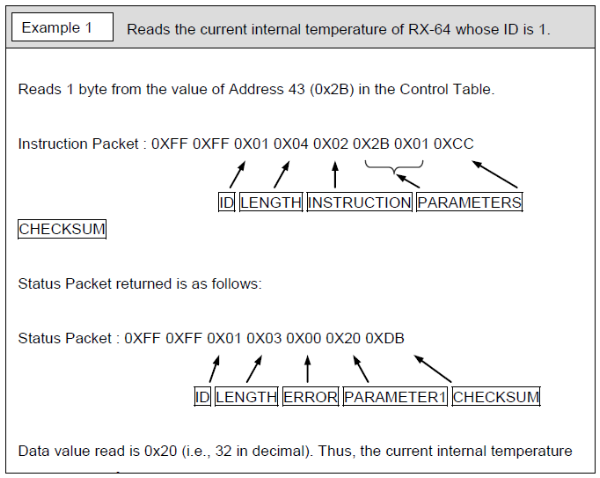
BUT all the dynamixel instruction packets and status packets start with:
0xFF 0xFF and then you get ID> Length> Instruction>Parameters>Checksum
like this
The servo's I want to use are Lobot LX-16A that use the same protocol with one difference: the packets start with 0x55 0x55 and then ID> Length> Instruction>Parameters>Checksum
so my servo's don't react on the dynamixelplugin How can I or someone change the 0xff too 0x55 in the plugin? Is it possible too get the source code for the plugin? or is there another solution? I can't afford real dynamixels and this seemed a good alternative
thanx in advance for your help

Wait....
Holding breath
There you go...
You are amazing DJ. And thanks so another option...if even for a cheap Chinese Dynamixel knock off servo ! I can hear the cheapness! Dynamixels do not sound like that!
I can hear the cheapness! Dynamixels do not sound like that!
Ya it’s a pretty terrible servo. I wouldn’t use one.
Wow cool. Curious how you managed to set ID without a debug board. Any idea how to read current position of servo ?
Thanks.
Unfortunately, I’ll not be puting more effort into this cheap servos.
You can’t read position with the plugin. Use Auto Position and create the frames, which is more reliable anyway.
I didn’t set the servo id. I used the Id that the servo came with (default 1). Use their usb uart board and utlility to set the id.
There will be no further development on this servo. It’s barely worth supporting after experiencing it. Kind of upset if it’s poor quality, specially when the ezrobot HDD servos are ten times the quality and reliability for lower cost.
Have fun!
Hey @DJ. I appreciate the effort. I blew $100 on 5 Servos and a controller. They don’t even have mounting brackets on thingiverse for them. I live in hopes of finding a high quality dynamixel equivalent without robotis over inflated prices.
in other news. For sale 4 working Servos and one burnt out servo and a UART controller. Fully compatable with EZ-Robot and EZB