
ed_eilers
Netherlands
Asked
— Edited
Help With Serial Bus Servo (Almost Dynamixel Protocol)
I would like to get some help on serial bus servo's that use almost the same protocol as dynamixel.
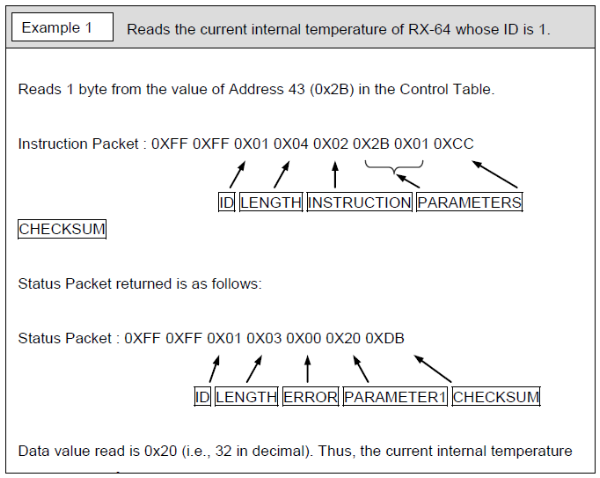
BUT all the dynamixel instruction packets and status packets start with:
0xFF 0xFF and then you get ID> Length> Instruction>Parameters>Checksum
like this
The servo's I want to use are Lobot LX-16A that use the same protocol with one difference: the packets start with 0x55 0x55 and then ID> Length> Instruction>Parameters>Checksum
so my servo's don't react on the dynamixelplugin How can I or someone change the 0xff too 0x55 in the plugin? Is it possible too get the source code for the plugin? or is there another solution? I can't afford real dynamixels and this seemed a good alternative
thanx in advance for your help

These servo's are great the normal servo's also the ez-robot ones (sorry) are not ok I keep burning them. And these have feedback and al lot more options like the very expensive dynamixels it would be great if we could get them to work with ez-robot.
Now I use ez-robot to generate the commando's as a virtual servo them send the value and id serial to a arduino that translates it to the right protocol and that goes serial to the interface and that controles the servo.
stil having trouble to send and the servo value and the id from ez-robot to arduino in a good way as i can't figure out how to do this in the scripting language
the visualbasic did not work for me also errors and sleepless nights
Glad more people picked this up and maby DJ can add this servo to EZ-Robot because it opens a hole lot of new possibilyties to EZ-Robot
Greetings ED
@Nick did you use the interface ? Or did you connected the servo directly? think you need too use the interface. i will test it tonight
I tried direct and via controller
I would not be to sure about quality of lewansoul though they say they are up to 8v and can run off a 2s lipo but turns out motor according to this thread is 4.5v I quickly threw a voltage regulator on to be safe. https://forums.trossenrobotics.com/showthread.php?14684-Lewansoul-LX-16A-bus-servo
@Ed, you have never used the ezrobot HDD servos. If you were burning out Ezrobot HDD servos, id be curious of HOW? But you’re not so it’s okay
These are the HDD servos, @Ed...
@Nink, I don’t have faith in those LewanSoul servos either... there’s only two servo brands I trust: ezrobot HDD’s and DYNAMIXEL. Anything else is a waste of dollars.
Time and time again I watch people on here try to save a buck by purchasing eBay and poorly made cheap servos. It ends up costing the user more because they end up having to purchase proper servos - or they abandon the project all together...
By supporting these poorly manufactured cheap servos in a plugin, ezrobot is not supporting or endorsing these fire hazards. My only initiative to support these servos is because enough community members have asked for support. And that’s what ezrobot does, whether we agree or not
@Nink - what do you mean "You tried with the controller"?
Are you referring to the plugin? The servos would connect directly to the EZ-B via the specified UART in the config of the plugin. I recommend using the hardware UART and not software (unless it's an IoTiny)
Hey DJ
They give you a little protocol converter controller. So you go EZB D5=>Controller=>LewanSoul
I tried D5 to LewanSoul direct as well
https://www.amazon.com/LewanSoul-BusLinker-Debug-Board-LX-16A/dp/B073WRLJB2
The plugin I created is for the servo, not a protocol converter controller. The plugin will not work if the ezb is not connected to a Servo.
OK the only way I can get it to work on Arduino is if I go arduino TX to Controller RX at 115200 and then the controller talks to servos. If I get time I will translate arduino code to EZscript