
ed_eilers
Netherlands
Asked
— Edited
Help With Serial Bus Servo (Almost Dynamixel Protocol)
I would like to get some help on serial bus servo's that use almost the same protocol as dynamixel.
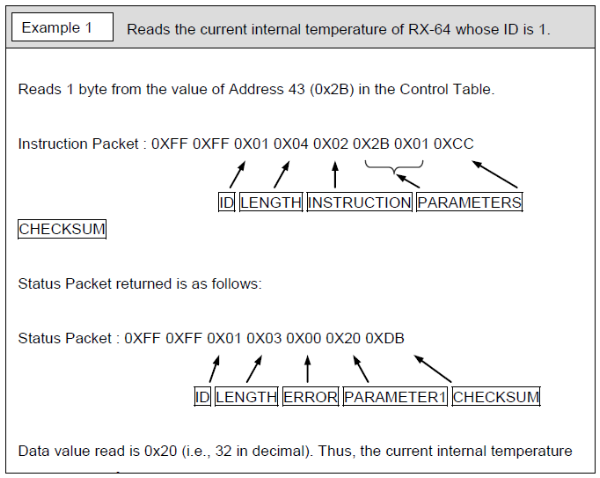
BUT all the dynamixel instruction packets and status packets start with:
0xFF 0xFF and then you get ID> Length> Instruction>Parameters>Checksum
like this
The servo's I want to use are Lobot LX-16A that use the same protocol with one difference: the packets start with 0x55 0x55 and then ID> Length> Instruction>Parameters>Checksum
so my servo's don't react on the dynamixelplugin How can I or someone change the 0xff too 0x55 in the plugin? Is it possible too get the source code for the plugin? or is there another solution? I can't afford real dynamixels and this seemed a good alternative
thanx in advance for your help

So I caught up on the Live Hacks now, and am getting a better understanding on how this all works...still got a good amount of learning how to utilize this, but it is super interesting!! I am happy that I checked the archived Live Hacks!! Will dig thru them more in the next few days!
BTW, i didn't download the file link for the unity project you had listed. I clicked to view it on my phone but when i went to use my laptop, it was gone.
@DjSures I thought you already downloaded the scene...we are currently debugging the issue! I hope after this weekend it will be all working fine, that'll safe you the time having to mess with it!! If the problems are reoccurring I will repost! It would be kind of better to not have the download link public though!!
It shouldn't be an issue that requires debugging. It's such a simple process. Set the servo positions, send the packet. It's real real real real easy . Why dont you want it public if you're asking for help? If you want people to help, they have to see it. Otherwise, what's the advantage of someone helping if they can't learn from it as well?
. Why dont you want it public if you're asking for help? If you want people to help, they have to see it. Otherwise, what's the advantage of someone helping if they can't learn from it as well?
Seriously, just set the servo positions and send the packet. It's real real real simple - it can't be any easier than it is. Perhaps you're attempting to send the packet from multiple threads? That won't work. You can only have one client transmit the servo position packet.
Within this scene a paid plugin is included, and I do not want to harm the maker by posting the download link public...even though he seems to be pretty relaxed about it!!
I put the whole thing to GitHub back in the days, when we were still developing, and took it down for that exact reason!!
Also while researching about serial bus servos, I found that a lot of wiring also includes an inegrated circuit...mostly a 74LS241N. Would you also recommend utilizing it? I am still doing research on the whole topic, so I might be off...just taking guesses here! My LX-16A will take a month for shipping, I did not py attention and ordered them from China!!!
So I guess I will order a pair of Dynamixel now, they offer faster shipping and I am really curious now and want to test serial bus servos!!
@ed_eilers how is your experience with the LX-16A servos, did you do any stress tests...how are the holding up? I am kind of in the middle of figuring out the servo setup for my robot, and would like to know if its worth using them in my project!!