ed_eilers
Netherlands
Asked
— Edited
Help With Serial Bus Servo (Almost Dynamixel Protocol)
I would like to get some help on serial bus servo's that use almost the same protocol as dynamixel.
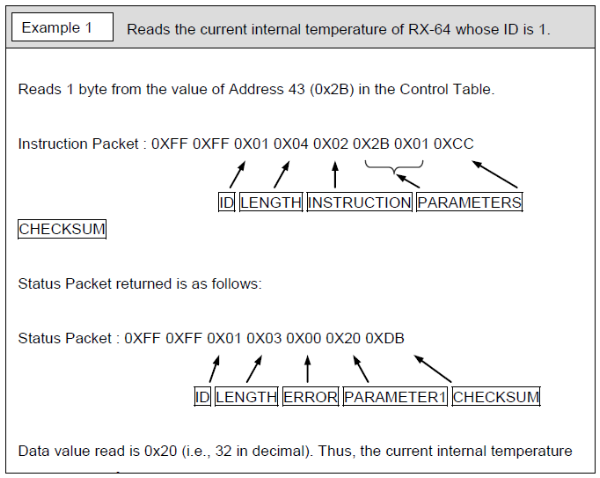
BUT all the dynamixel instruction packets and status packets start with:
0xFF 0xFF and then you get ID> Length> Instruction>Parameters>Checksum
like this
The servo's I want to use are Lobot LX-16A that use the same protocol with one difference: the packets start with 0x55 0x55 and then ID> Length> Instruction>Parameters>Checksum
so my servo's don't react on the dynamixelplugin How can I or someone change the 0xff too 0x55 in the plugin? Is it possible too get the source code for the plugin? or is there another solution? I can't afford real dynamixels and this seemed a good alternative
thanx in advance for your help

@fxrtst Why are you researching the other serial bus servos while having Alan already wired up with those Dynamixels? Is it just curiosity or are you looking for the best possible option for your product, having in mind that you might have to purchase a huge quantity at some point? I guess by the time Alan and Alena will be ready for the market, you will get a company to produce your own brand like @DJSures does?
Would you mind to share how you wired up the Dynamixels? I guess I will burden myself with hours of remodeling my robot, and spend quiet some money...but now I got it stuck to my mind, and I am willing to give serial bus servos a try!
The things that kept me from it so far was, its not really well documented for the Raspberry Pi...there is the option to purchase hardware that should get the job done, but I am afraid to purchase something that will proof useless in the end!
What I found was the following
https://www.trossenrobotics.com/open-cm-904c
or these two USB connected products
https://www.trossenrobotics.com/usb2ax https://www.trossenrobotics.com/dynamixel-u2d2.aspx
Any hints on which route I should go...
They other thing that kind of annoyed me is, that at the moment all the boards and servos are running on 5Volts, so I would have to get a new power supply, I was thinking of some power supply with different fixed Voltages...like the ones you put into a PC?
But all in all this would mean, I will basically on the way to rebuild my robot completely!!
So I could also spend that time trying to get my Unity App working better, rather than just putting a lot of effort into having better servos...while the functionality of it basically stays the same?
What are your thoughts on this?
There are several reasons for walking down the path of other servo that run on serial bus. I like the idea of tidy cable management. Dynamixels rock, but good to have other options. If I understand what Synthiam is about..its getting together alot of hardware items to work with EZ hardware. So, it just makes since to try some of the other products.
Dynamixels are easy to set up. Just make sure you get the TTL versions. The motors have T at the end of their nomenclatures. You are correct the voltages vary per product but can go as high as 14 volts for some bigger ones.. The ideal voltage is 11.1 which is what i run all my robots on. So that might be an issue for you or for the battery pack location etc.
You don't need another control board for them (as you linked to trossen) the EZB does it all.....I usually make a separate voltage for the servos and just output the signal wires to the ezb and share a ground wire. Connect the first servo to D5 and you are on your way.There is a bit to do inside the plug in to get the servos to work. That includes changing the Ids (easy) baud rate and activating the port.
If you choose to do that then I can make you a real quick video on how to set up just one servo youll understand how to set up the others from there.
I'm all up for you working on the unity app. Its something I want to revisit soon. Getting a version working with ARC/synthiam is a must so we can use sensors etc with the servos.
Always do what cost the least..lol.....
The dynamixel -or- LewanSoul servos connect to the Raspberry Pi's serial port, and are moved with the EZBPi Server - and ARC. ARC can either be on the Pi itself, or on a remote machine. Either way, you need the EZBPi Server on the Pi for them to work.
It's actually really easy to control those servos with the Pi using ARC and EZBPi: https://synthiam.com/Hardware/Hardware/Raspberry-Pi-17681
So which Dynamixel Servos would you guys recommend? I heard that the DYNAMIXEL AX-12A is the most favored servo for robotics?
And yes, cable management is a reason, plus getting feedback on servo position is something that is a very cool feature!!
I am happy to hear that you do not need any additional hardware to get them running... So I might give it a try with my EZ-Bs!!
But connecting them straight to the Raspi is not possible? @DJ Sures, you said something about turning the Raspberry Pi into an EZ-B...so that would mean I could get the Dynamixels to work straight out of the box?
Most information I found was at least having to deal with building a small circuit system to get things working out!
I would like to drive the servos with ARC and also with my Python applications if possible!
Well if I read the info right...it is possible to connect them straight to the Raspberry Pi, too good to be true!!
So sad I cannot join in for the stream!! Gotta go to bed now!!
Yeah you gotta catch up on Djs streams ...he had stuff running on the PI. So cool to see ARC running on all these controllers!
You gotta get on our time so we can chat live! Remember you can sleep when you are dead!
Hahaha so true!!! But my brain is already somewhere far beyond being capable of comprehending any tech stuff...might just pop by to say hello!! If I manage to stay awake!!
ARC on the Pi is a milestone!!
Thanks for bringing up Unity too...that was another one!!
Soon we will piece it all together!!
Hey guys...still wrapping my mind around serial bus servos!
So one thing I figured is that I would be buying a PC Power supply to have multiple high amp power outs... Am I correct on that, or how are you dealing with this is issue?
And secondly, I was trying to figure out cable management. So given that those servos would be wired to an EZB or Raspberry Pi directly, you could daisychain them. But it would also mean that you'd have to run them down one arm/leg to the hands/feet, and then back again to the torso, to start stringing up the other limb? Am I wrong here? The EZB/Raspi only connect to the first servo, no second connection is possible right?
So would this mean that given the scenario of a robot driven by serial bus servos, some kind of controller board would be necessary, if you would not want to end up having a very messy cable management...
I ordered some LewanSoul Servos, sincce they seem to run on 5V and I dont burn a lot of money in case I break them! First try on serial bus servos, so lets see if I will be able to produce some magic smoke!!