Robot Building Questions



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Robot Sticker

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

PCA9685 Servo Driver
Drive 16 servos over EZB I2C with a PCA9685 PWM controller, using ARC servo commands and...

Send robot status alerts to iOS, Android and Windows via Pushover.net. Configure User/App keys to notify on low battery, stuck or task events.
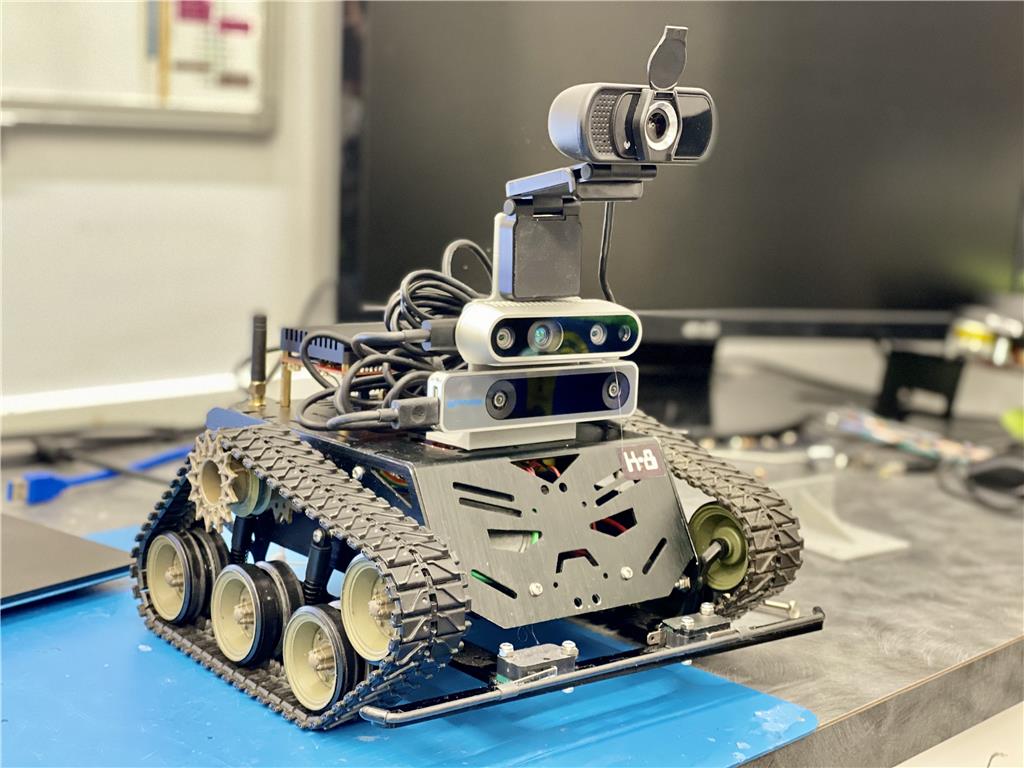
Synthiam ARC test robot: Devastator tank with Rock Pi/X, Sabertooth+Kangaroo, Realsense D435i/T265 for autonomous navigation.

Dialogflow Driving Sphero Reliably
I’ve got a Sphero (SPRK+) paired over Bluetooth and the Sphero Movement Panel works great for manual driving. I’m now layering in the DialogFlow robot...
Global Variables Between Scripts In ARC
@Athena, can you help me set up global variables in one script (LEG_v6) so they can be read and sent by another script (UART_v6)? Context: I'm...
Why Does Speech Recognition Pickup Background Nois…
One thing I still don't understand: whenever I have the "Speak Rec" Robot Skill operating, it picks up...
Obstacle Scan Only Once
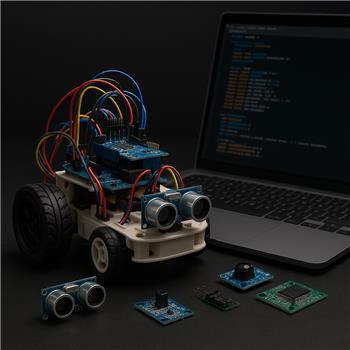
, #include #include static const uint8_t UART_HEADER = 0xA5; // ARC -> Arduinostatic const uint8_t CMD_STOP_MOTORS = 0x01;static const uint8_t CMD_ACTUAL_BEARING =...
Stepper Reset Issue In Arduino Sketch
I'm using an Arduino Mega as the hardware controller (acting like an EZB/microcontroller) to provide PWM to four stepper motors via the...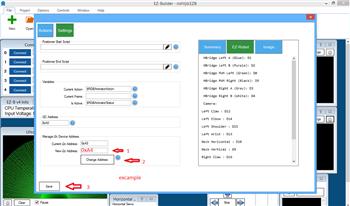
12C Adres How Do I Know?
i know i asked this before.but i cant find the topic. my question is ,if i change a 12c port as in pic below. how do i now withs port i changed on ezbv ?sinds there are 3...
Arduino PWM Bearing Control Help
Hi @Athena, I'm requesting help to add capabilities to an existing Arduino sketch. The sketch is included at the end of this post. Can you incorporate...Sharp IR Collision Detection Configuration Issue
I have a question about the Sharp IR Collision Robot Skill. I'm conducting a small test on my robot using the Sharp 5V Analog GP2Y0A02YK0F IR sensor. I've configured the Sharp IR Collision Skill with the following settings: - Analog Port: ADC7 - Interval: 1000ms - Collision Detected Condition: "Greater than" 28 Could someone explain why...
AI Scripting In ARC?
I know I can ask for JavaScript writing help here on the forum from Athena. I thought I read a while ago that this feature is also available directly in ARC (so you don't have to...
Bing Speech Recognition Wake-Word Pause Issue
I have a question about the ARC Robot Skill "Bing Speech Recognition". I am using the Bing Speech Recognition skill with...
Servo Ramping Options In ARC
I use the Auto Position robot skill. What is the best way in ARC to ramp a hobby servo up to speed and ramp it down to a stop? I vaguely remember a servo ramping...