Plugin Compliance
Overview EZ-Robot is committed to offer users a secure and dependable robot development environment. Due to the high expectation of efficient, dependable and secure from users, there are a few dependencies and restrictions which we enforce in your plugins during review.
Avoid Length GUI Thread Processing It is very convenient to throw a bunch of code into an event raised by a GUI widget, such as a button or checkbox. When code is executed in an event raised by the user interface, it runs in the thread of that object. This means lengthy code will delay/pause the user interface experience until the code has completed and processing is returned to the GUI thread. This behavior must be reduced at all cost by using events, threading or background workers.
Events .Net framework provides a number of events for controls, forms and such. Additionally, the ARC framework provides events for various activities. It is highly preferred to use Events rather than Timers. This includes servo movements, new camera frames, adding/removing controls to workspace, and more. It's good etiquette to unsubscribe from events when your plugin is being closed in the OnClosing() event. If you do not unsubscribe from events, the .Net framework will not know your plugin and respective controls have been disposed, and therefore it may still attempt to execute the method. Notice that an unsubscribe from event is a -= and a subscribe to event is +=
public MyPluginForm() {
// Subscribe to events to monitor control activity on the workspace
OnBehaviorControlAdded += FormMain_OnBehaviorControlAdded;
OnBehaviorControlRemoved += FormMain_OnBehaviorControlRemoved;
}
private void FormMain_OnBehaviorControlAdded(object newControl, int page) {
MessageBox(string.Format("{0} has been added to the workspace #{1}", newControl.Text, page));
}
private void FormMain_OnBehaviorControlRemoved(object removedControl) {
MessageBox(string.Format("{0} has been removed from the workspace", removedControl.Text);
}
private void MyPluginForm_FormClosing(object sender, FormClosingEventArgs e) {
// Unsubscribe from events that I subscribed to while my plugin is going away
OnBehaviorControlAdded -= FormMain_OnBehaviorControlAdded;
OnBehaviorControlRemoved -= FormMain_OnBehaviorControlRemoved;
}
Timers One of the most common timers that is used from convenience is System.Windows.Forms.Timer, which is heavily frowned upon and will always have your plugin revoked from public access. An alternative and accepted timer for your background worker is System.Timers.Timer.
The difference between these two timers is trivial programatically, but vast in their operational behavior. The System.Windows.Forms.Timer will raise the elapsed event in the user interface thread, while the System.Timers.Timer will raise the event in a background thread.
As a new programmer, you may be familiar with the behavior of System.Windows.Forms.Timer not raising the elapsed event until the previous event has completed. With System.Timers.Timer, if your last elapsed event has not completed, a new one will still be raised. Avoid using a Lock() statement for this behavior, and instead use a boolean variable shown in this example...
System.Timers.Timer _timer;
bool _isRunning = false; // variable to ensure timer runs once at a time
public FormMaster() {
InitializeComponent();
_timer = new System.Timers.Timer();
_timer.Elapsed += _timer_Elapsed;
_timer.Interval = 100;
_timer.Start();
}
void _timer_Elapsed(object sender, System.Timers.ElapsedEventArgs e) {
// Check if another copy of the time event is running, if so get out
if (_isRunning)
return;
_isRunning = true;
try {
// Do some work
} catch (Exception ex) {
// Uh oh!
} finally {
_isRunning = false;
}
}
Cross-Thread Invoking While new programmers may feel comfort placing code in events owned by GUI widgets in the user interface thread, there is a different experience when working in a background thread. A background thread will not be able to modify parameters of a GUI object that exists on a different thread. This is called a Cross-Threading Exception. ARC has a helper class to make life easy for you, which is EZ_Builder.Invokers. You will need to use Invokers when updating UI components from System.Timers.Timer or most events that aren't triggered by UI. The Invokers class will check if an invoke is required.
void _timer_Elapsed(object sender, System.Timers.ElapsedEventArgs e) {
if (_isRunning)
return;
_isRunning = true;
try {
EZ_Builder.Invokers.SetText(textbox1, "Here is a number: {0}", 5);
EZ_Builder.Invokers.SetChecked(checkbox1, false);
EZ_Builder.Invokers.SetBackColor(button1, System.Drawing.Color.Red);
} catch (Exception ex) {
// Uh oh!
} finally {
_isRunning = false;
}
}
User Configuration Settings Never under any circumstances save user configuration settings in a separate project file. Always save user configuration settings in the ARC Project File using the tutorial step for Saving/Loading Configuration. Plugins that save configuration data locally to the drive will be revoked from public status. This is to ensure a seamless user experience within the ARC environment. If you have questions about saving custom user data, please inquire on the community forum for assistance.
Exception Handling Always wrap code in Try Catch to avoid unhandled exceptions, which will exit EZ-Builder. Your plugin will execute under the ARC master assembly. If your plugin throws an error that is not handled within an exception, the ARC instance may close.
try {
// do some work
} catch (Exception ex) {
EZ_Builder.EZBManager.Log("Error in control '{0}'. Message: {1}", this.Text, ex.Message);
}

Thanks for the quick response.
This what happens when you are working on robotics when its way past your bed time.
You miss the obvious
No problem - i get it
Sorry but can I ask you something why I didn't see the ARC library when I added visual studio even though I set up the C ++. DLL library and there's another way to execute it and send / receive console in out but I don't know how to do it with EZ_builder?Please follow the tutorial. It’s impossible to know why you’re plug-in isn’t showing up without asking you if you followed each step of the tutorial . Reviewing your screenshots, it doesn’t appear as if any of the tutorial steps have been followed.
. Reviewing your screenshots, it doesn’t appear as if any of the tutorial steps have been followed.
Hi i fixed it. thanks
Hello, I am trying the tutorial to get the robot to speak. I am using Visual studio. Currently, the sound is output from the pc instead of the robot. Is there a code I can attach so that the sound comes from the robot speakers instead of the pc?
Look in this tutorial for the step labeled "output audio from ezb". It’s lower down in the list. There’s instruction examples for either playing audio (ie mp3) or text to speech.
Error: the referenced component" EZ_builder,EZ_B" could not be found, DJ Sure i hope you can help me !
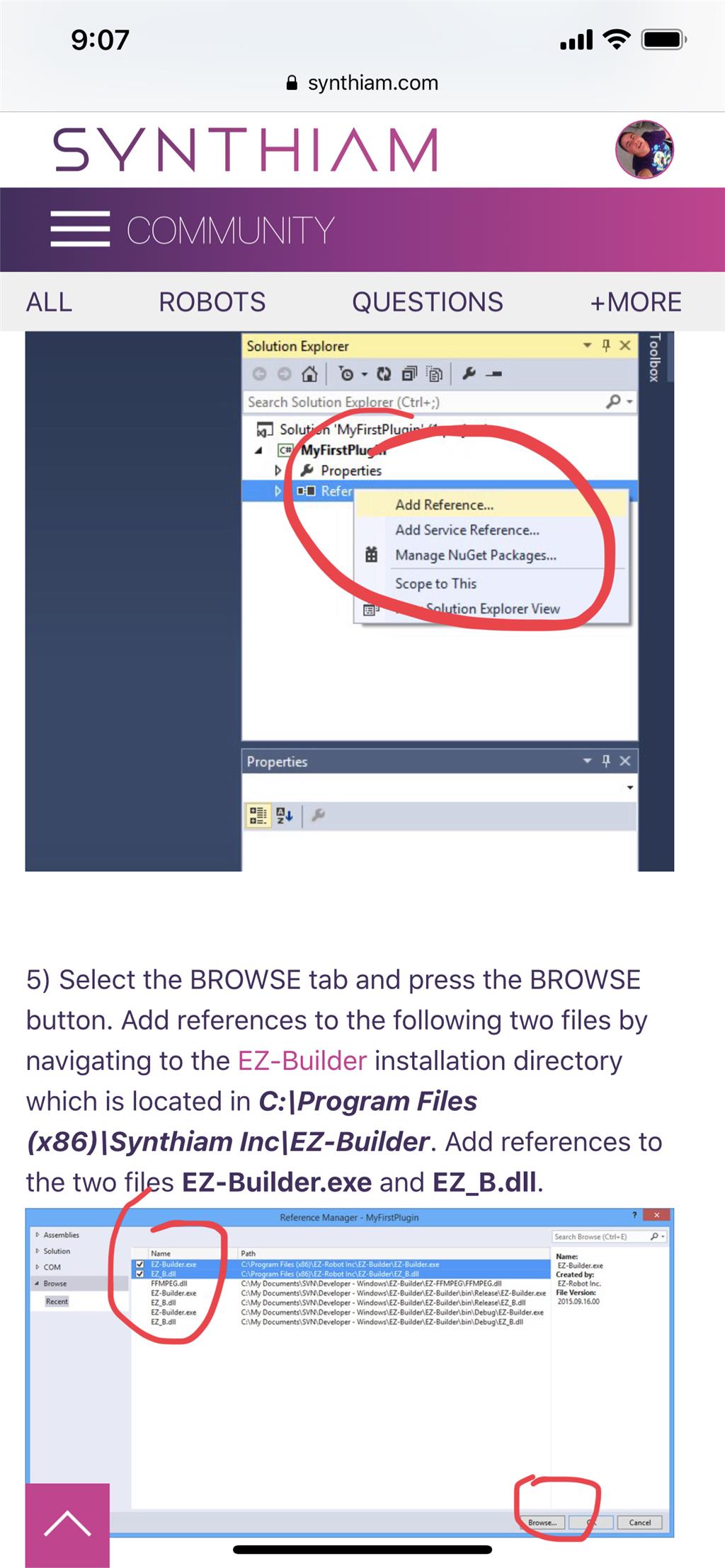
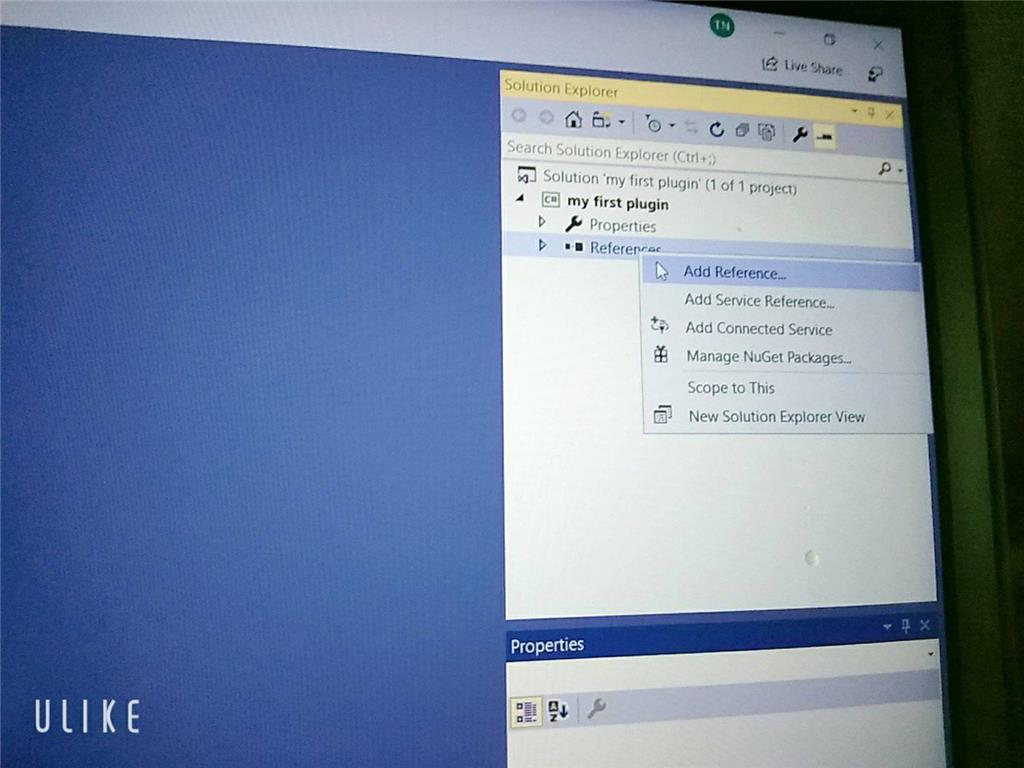
Joinny, you have to add the referencing by following the instructions in this tutorial. They are outlined with step by step to easily follow. Click add references, and browse to the appropriate files as directed in the tutorial. I can’t write anything clearer in response. The step to add references is incredibly clear but you’re skipping it.